#include <iostream>
#include <Eigen/Dense>
#include <Eigen/Geometry>
Eigen::Quaternionf rotationMatrixToQuaternion(const Eigen::Matrix3f& R) {
Eigen::Quaternionf q(R);
q.normalize();
return q;
}
Eigen::Matrix3f quaternionToRotationMatrix(const Eigen::Quaternionf& q) {
Eigen::Matrix3f R = q.toRotationMatrix();
return R;
}
int main() {
Eigen::Matrix3f R;
R << 0.225449, -0.929, -0.2932,
0.96947, 0.24372, -0.0268296,
0.0963978, -0.278249, 0.9556594;
Eigen::Quaternionf quaternion = rotationMatrixToQuaternion(R);
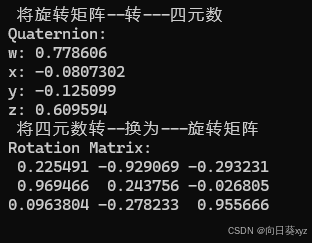
std::cout << " 将旋转矩阵--转---四元数 " << std::endl;
std::cout << "Quaternion:" << std::endl;
std::cout << "w: " << quaternion.w() << std::endl;
std::cout << "x: " << quaternion.x() << std::endl;
std::cout << "y: " << quaternion.y() << std::endl;
std::cout << "z: " << quaternion.z() << std::endl;
std::cout << " 将四元数转--换为---旋转矩阵 " << std::endl;
Eigen::Matrix3f rotationMatrix = quaternionToRotationMatrix(quaternion);
std::cout << "Rotation Matrix:\n" << rotationMatrix << std::endl;
return 0;
}

























 801
801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











