




最近刚学完了games101课程,做了一些课程笔记,只挑着比较重要的点记的,我理解的可能不是很深,有些地方可能有错误,欢迎指正,这是第一部分的内容,对应games101中P3-P4的内容
1.M(模型)V(视图)P(投影)变换, 作用:从三维世界到二维世界(本质上就是人在拍照)
M变换,原理就是看x’=ax+by y’=cx+dy,只要能找到他们的关系,就能够写出变换矩阵
2.变换矩阵的理解:
矩阵在左,向量(坐标)在右,一般地,矩阵都是方阵(n x n),向量都是列向量(n x 1),那么结果就是一个(n x 1)的向量,第一行为x‘(由变换矩阵乘向量得到), 第二行为y’ ,第三行为z‘
3.旋转矩阵:(能够自己推导)
R = cos -sin
sin cos
4.齐次坐标(先进行线性变换,在进行平移)
引入齐次坐标是为了统一平移变换,仿射变换:线性变换(缩放,旋转,切变) +平移
原理是增加一个维度,令点为1 向量为0
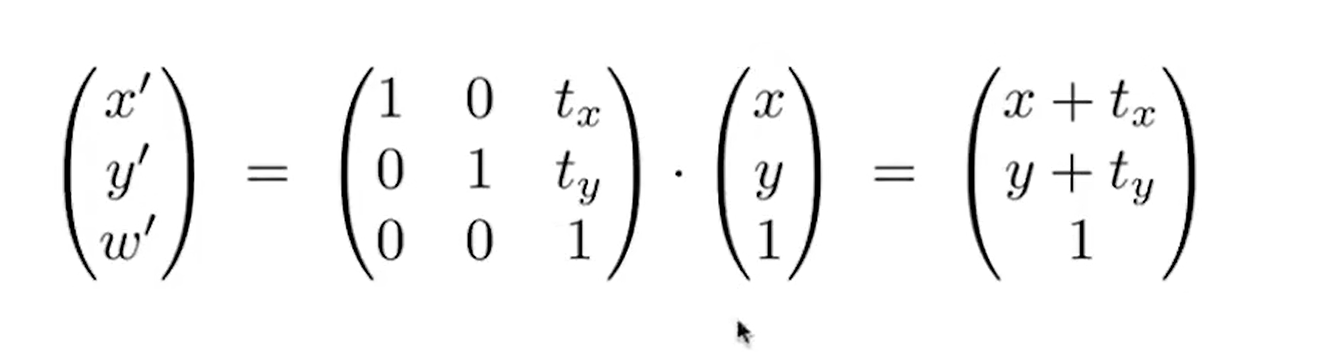
(x,y,1)表示一个点,变换矩阵最后(0,0,1)是精髓,即第三行与(x,y)这个点无关,与(x,y,1)相乘后得到的仍为1,即表示一个点,tx ,ty表示的是平移距离,与(x,y,1)的1相乘保持不变
5.逆变换
即乘逆矩阵
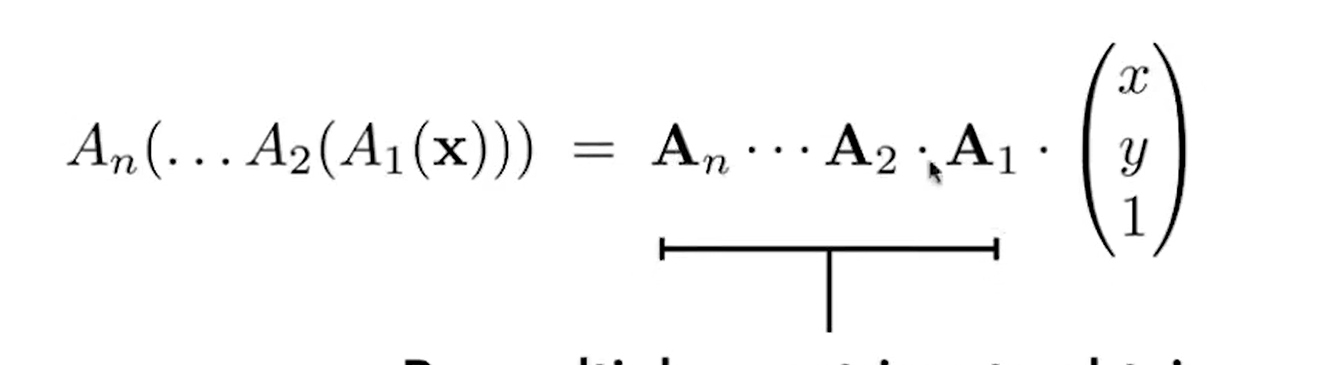
6.变换顺序
若有多个矩阵相乘,从右向左算,即向量先与最右边的矩阵做乘法,结果再与下一个矩阵相乘
矩阵存在结合律:可以先将所有的变换矩阵的结果求出,最后再乘向量
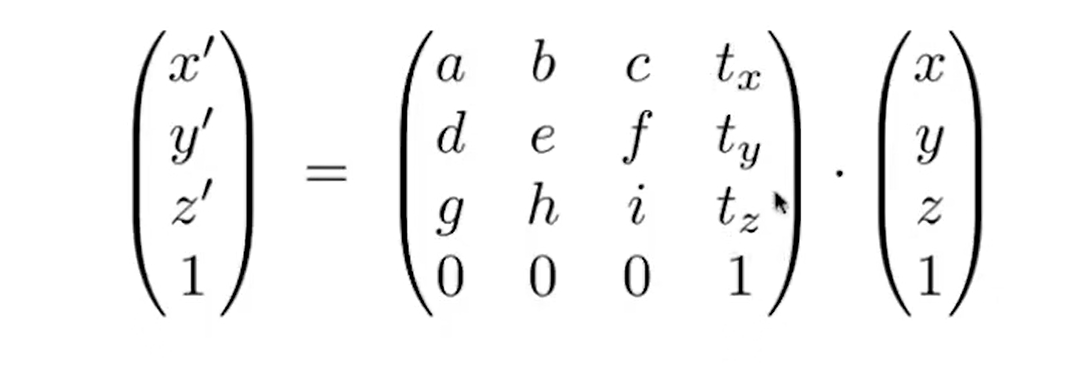
7.三维矩阵
与二维矩阵的性质相同
8.旋转矩阵的重要性质
旋转矩阵一定是正交矩阵,即逆等于转置 R-1=RT
9.理解三维旋转矩阵
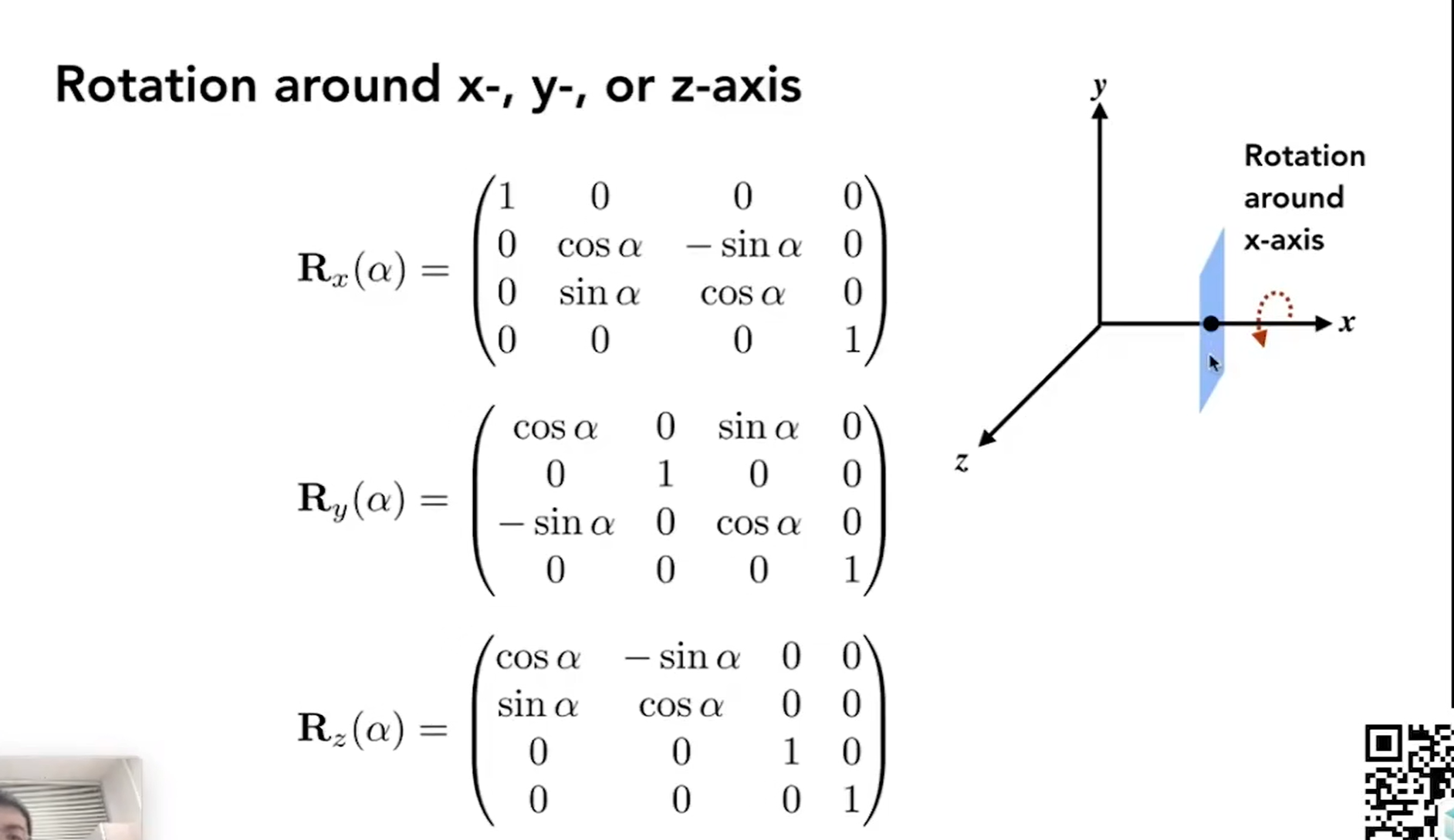
由上图可得,假设绕X轴,旋转,则x坐标不变,即x‘=x,所以第一行为(1,0,0,0),而y,z的坐标发生变化,填入二维的旋转矩阵坐标即可(因为这里相当于投影了X轴,仅在yoz平面内做旋转),而且y’ z‘的坐标与x的坐标无关,即y’ = 0x+… z‘=0x+…
重点:由于绕y轴旋转时,所建立的平面为zox面(+y轴由z X x 所得到),但是我们所需要的是xoz面(x X z 所得的是-y),所以这里要进行一个转置,转变为xoz面,相当于做逆变换
10.V(视图变换)
定义三个向量
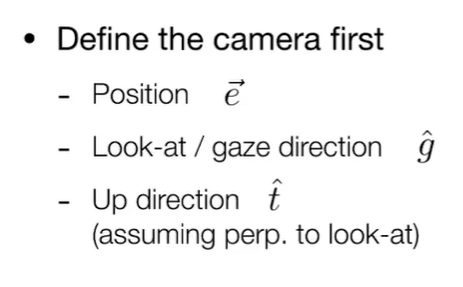
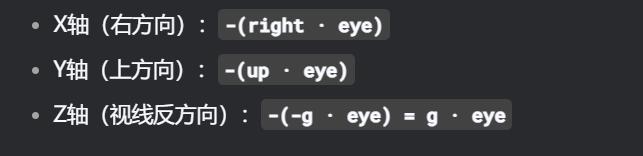
约定:相机总是看向-Z轴,向上方向为+Y轴,在原点,e指向+X轴
从这里可以得出一个结论:当我们移动相机时,模型也跟着相机做相对运动,当相机移动到约定位置后,拍出的照片不会发生变化(本质上视图变换也是在做模型变换)
如何将摄像机调至原点?
思路:我们可以先将g向量旋转到-Z轴上,然后将e向量旋转到+X轴上,然后将t向量旋转到+Y轴上
最后将相机平移到原点上即可。
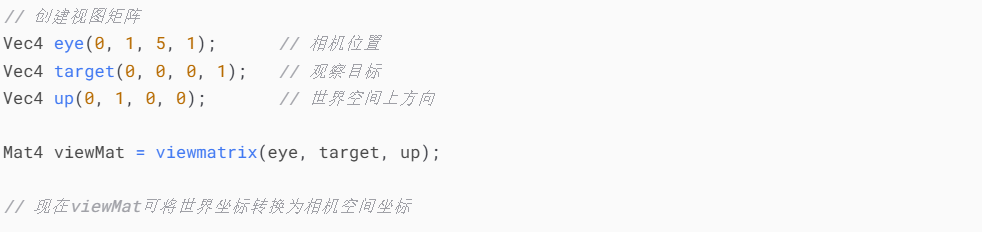
我们这里先定义几个量:
eye,相机位置,这是一个点
target,相机看向的方向,这也是一个点
up,相机的向上方向,这是一个向量
g = target-eye
t = up
right = g X t
-1 如何进行相机的平移
点乘=投影。
求eye(相机位置)在X,Y,Z轴上的投影即可,然后做反方向的平移
-2 如何旋转轴
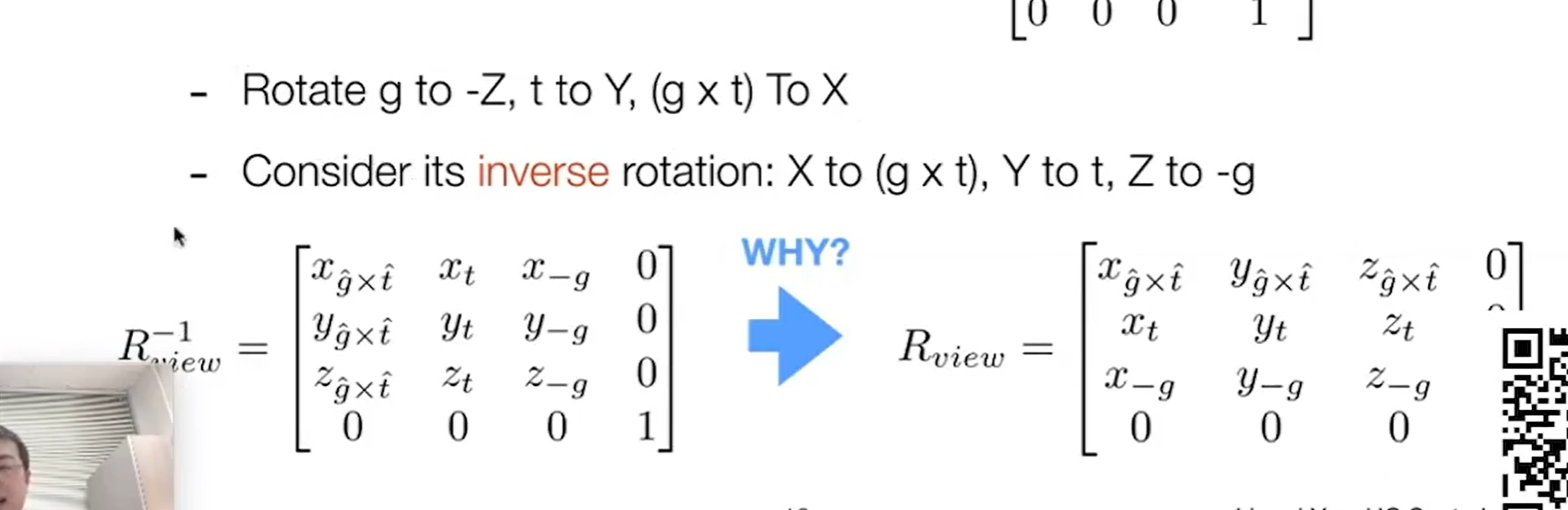
做法:我们知道如果将某一个轴旋转到坐标轴是很困难的,所以这里我们可以先求旋转的逆矩阵,也就是从坐标轴旋转到某一个轴,然后在对这个逆矩阵求逆,我们就得到了旋转矩阵,而旋转矩阵是正交矩阵,矩阵的转置等于逆,所以我们直接求转置即可。
简单说一下为什么是上面这个矩阵
我们假设要将x轴旋转到gxt方向上,x轴是(1,0,0,0),那么这个轴去乘上面的这个矩阵,得到的结果就是(xgXt,ygXt,zgXt,0),这就旋转到了gXt轴上,同理,其他的轴也可以这样解释。
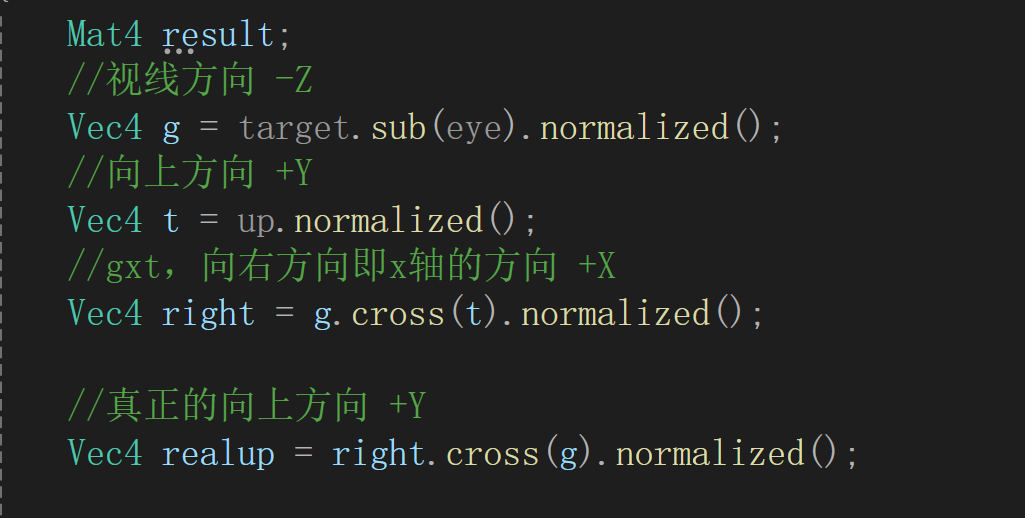
修正上方向是为了确保正交
上述代码也表示了如何构建坐标系
right=g叉乘t,就表明+X,可由g与t的叉乘得出,在右手坐标系中,+X由+Y叉乘+Z得到,而g表示的是-Z方向,所以-Z叉乘+Y可得到正确的结果+X
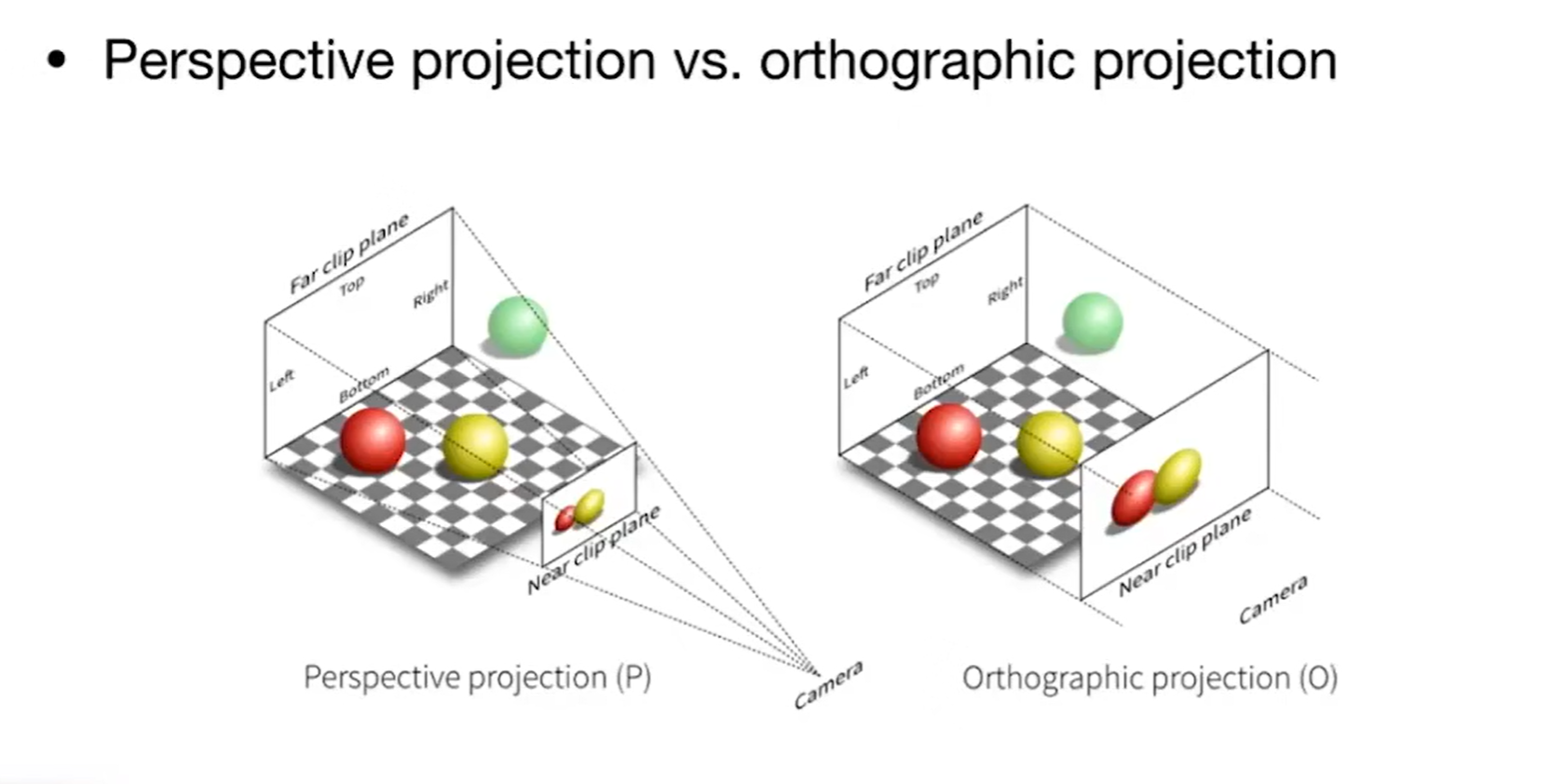
11.P(投影变换)
透视投影:具有进大远小效果,成像区为锥形
正交投影:不具有进大远小效果,成像区为矩形
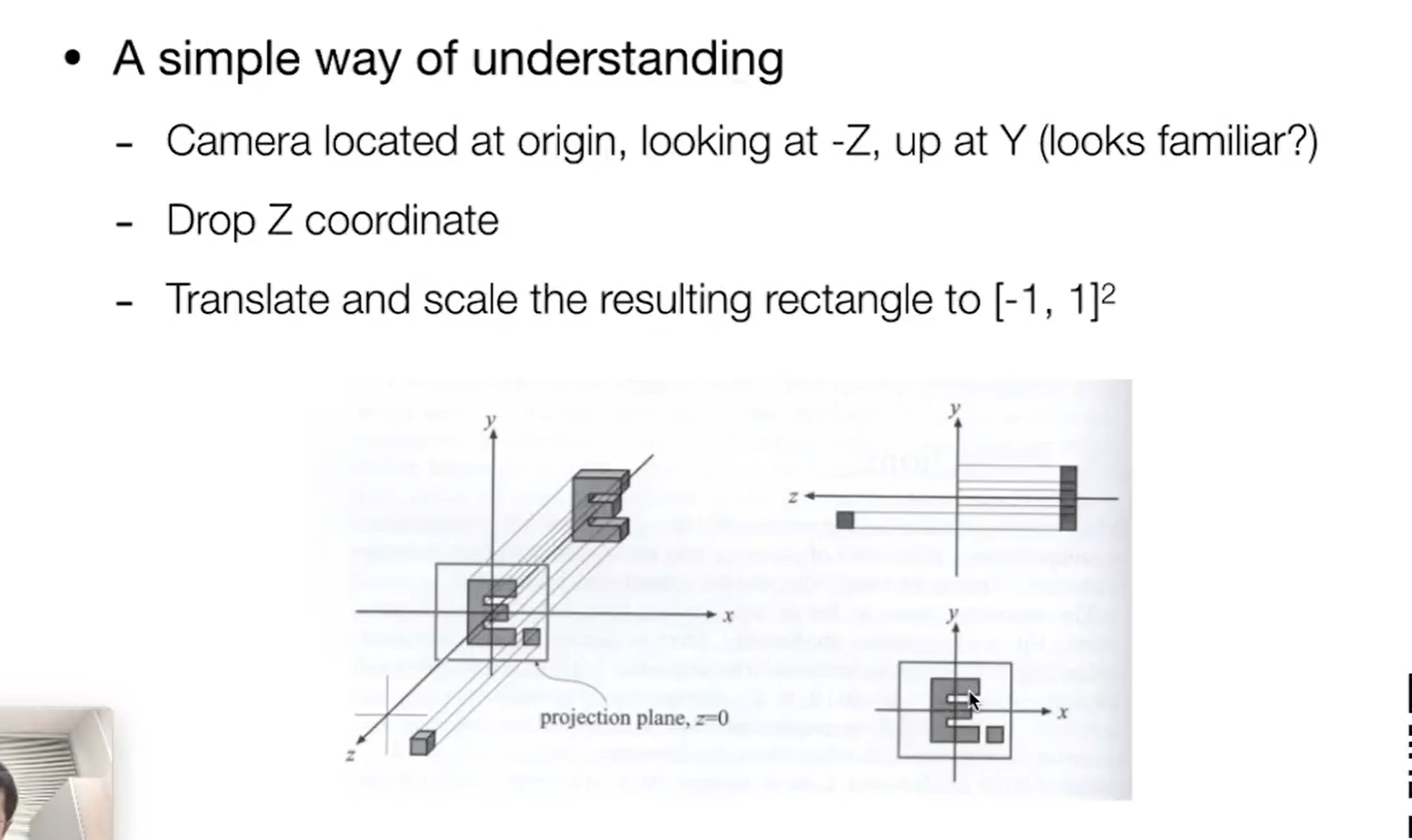
如何完成正交投影?
(1)这种方法并没有在图形学中有着广泛的应用,算是一种比较好理解正交投影的方式
1.摆摄像机(V)
2.舍弃Z轴,只留X,Y轴
3.将摄像机成像区的大小缩放为标准型(边长为2的正方形,具体表现为 [-1 1]的正方形),模型会被拉伸,后续还会做视口变换
(2)更加一般的做法
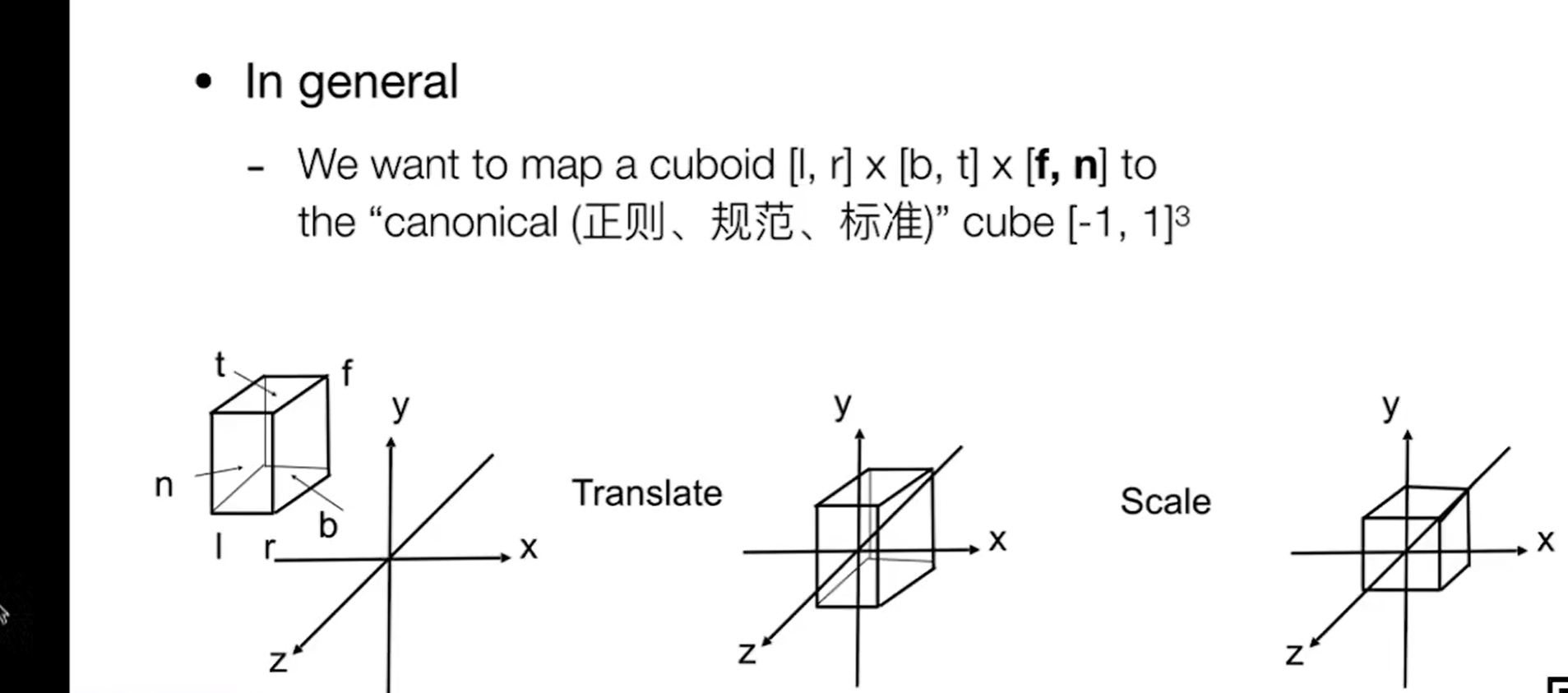
定义:我们定义了一个长方体,在Z轴上(n,f)来表示远近,在X轴上(l,r)来表示左右,在Y轴上(t,b)来表示上下,由此,我们定义了一个长方体
这里f<n 原因是向-Z轴上看
解释:
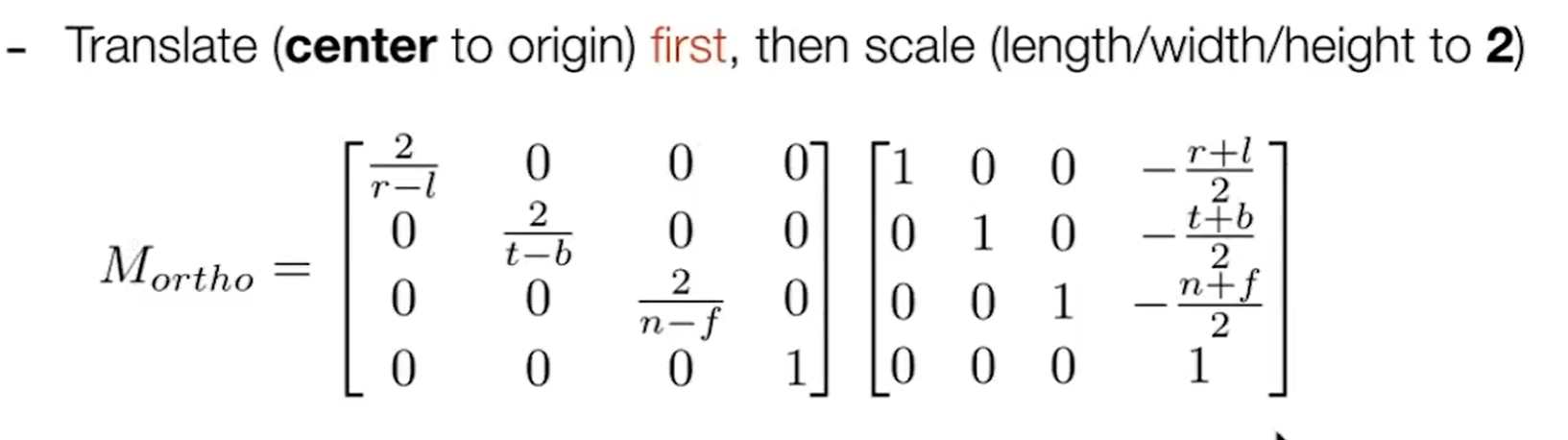
我们将这个长方体先通过平移变换,将长方体移动到原点(本质上是MV变换),然后进行缩放为[-1 1 ]的标准立方体(在这个范围之外的模型都将被裁剪),然后进行投影,即舍弃掉Z轴
这里注意一下,虽然相机在原点,但是成像区域是这个立方体。
最终的正交投影矩阵:
先平移在缩放,所以这两个矩阵无法合成为一个
透视投影:
如何做透视投影?
本质就是将锥形成像区转变为矩形成像区,然后进行正交投影
锥形成像区转变为矩形成像区的推导是及其重要的。
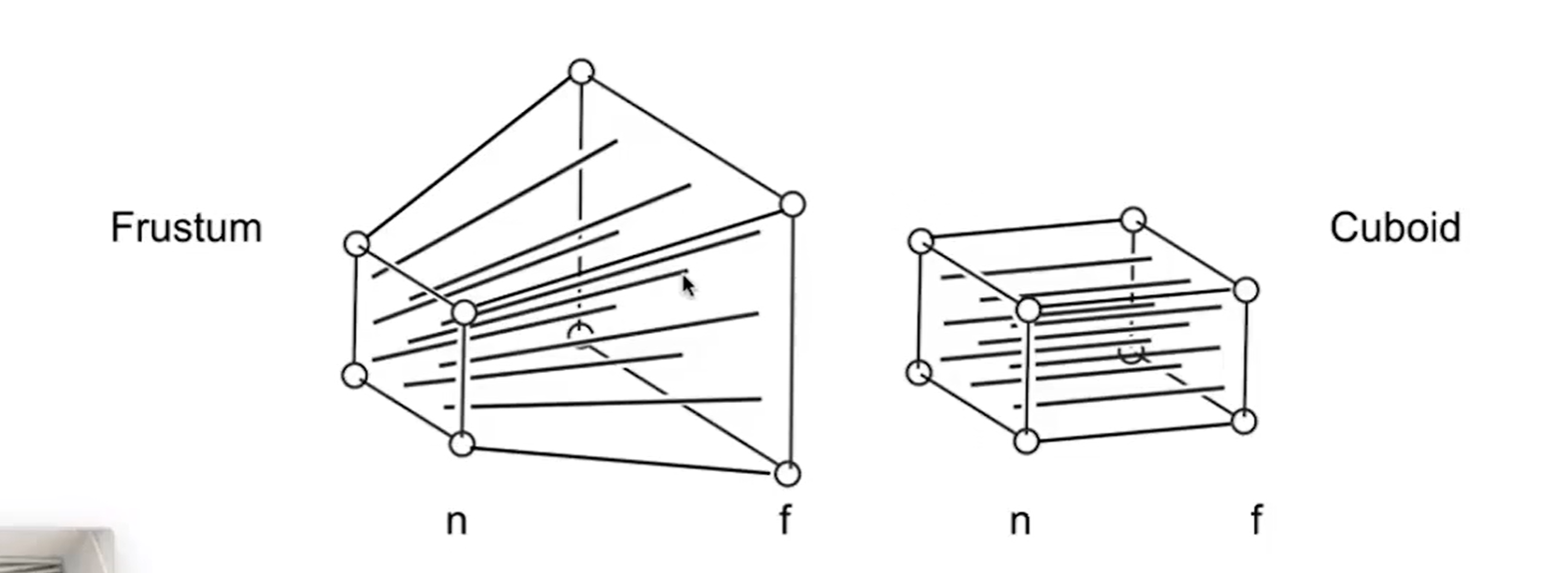
规定:近平面的每个点都不变,远平面上所有点的Z值不变,且远平面中心点不变
推导:
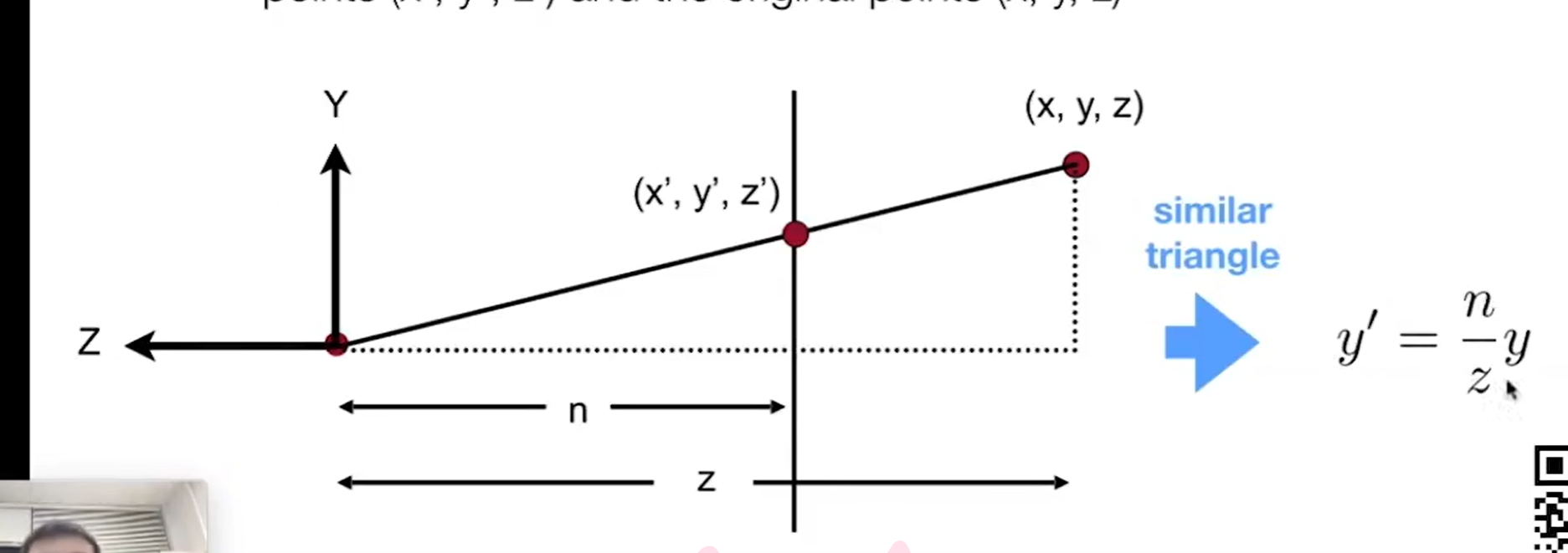
先看X,Y的变换情况,由上图可以得出x’ y’的变换情况,但是最重要的是不知道z坐标如何变换,可能变大也可能变小
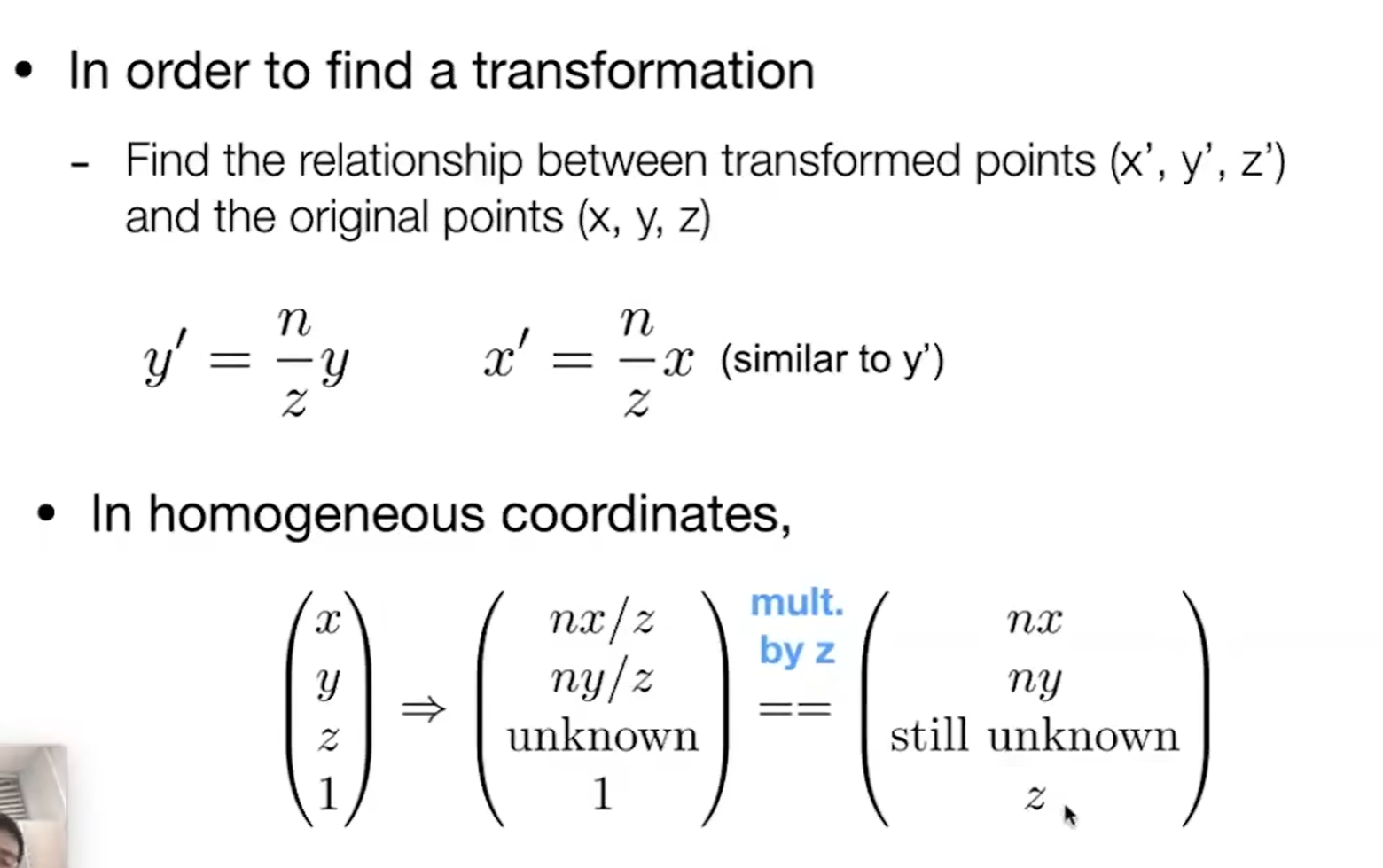
解释:当我们确定好 x‘ y’ 后,有如下式,M(变换矩阵) X(x,y,z,1)=> (nx/z,ny/z,unknown,1),又因为齐次坐标中,同乘一个数,坐标不变,这里我们同乘z,可得(nx,ny,unknown,z)
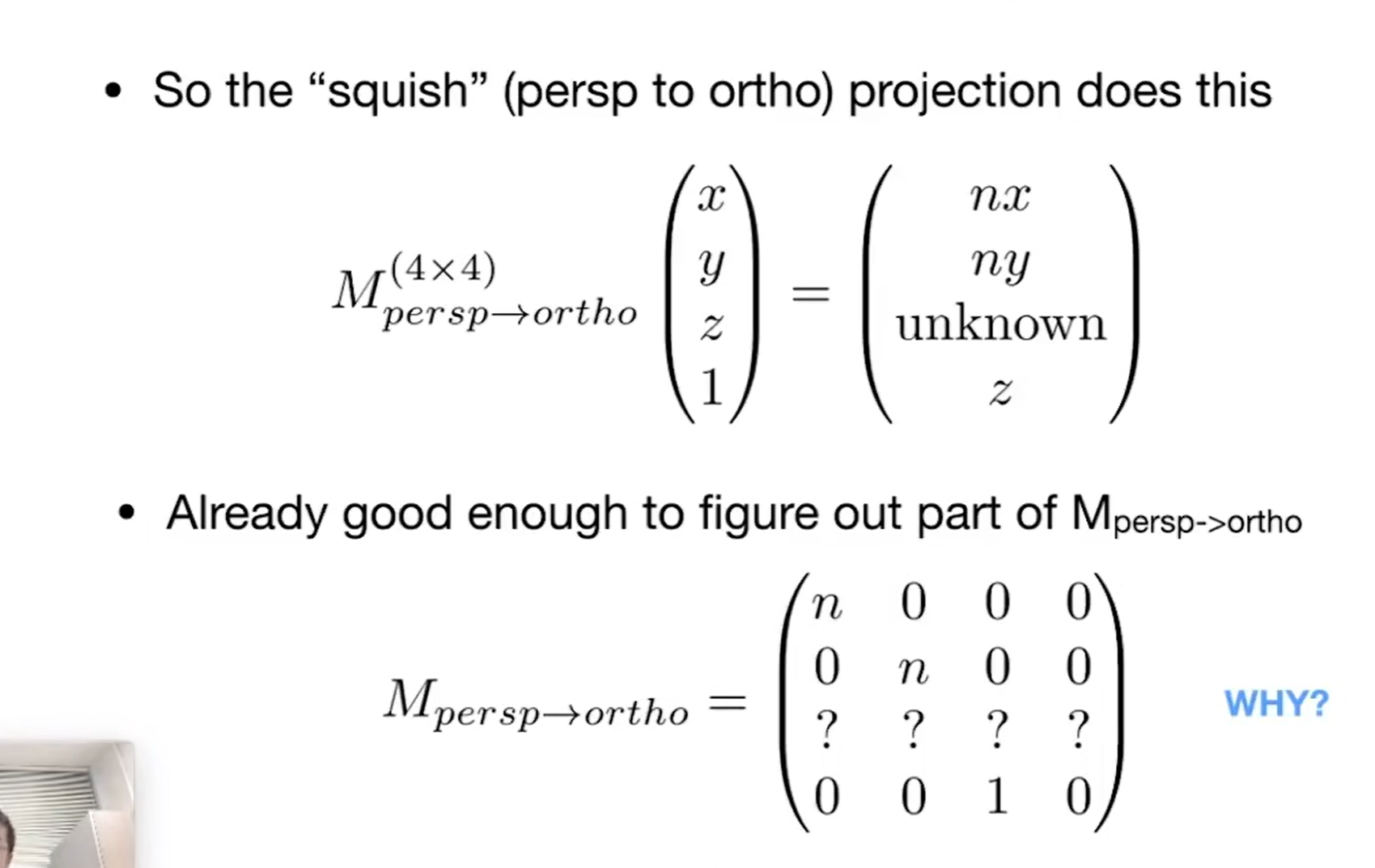
下面我们就可以先填数:因为已知M是4*4的矩阵,可得第一行(n,0,0,0)
第二行(0,n,0,0) 第三行不知道 第四行(0,0,1,0)注意:这里可不是仿射变换,不要认为最后一行是(0,0,0,1)
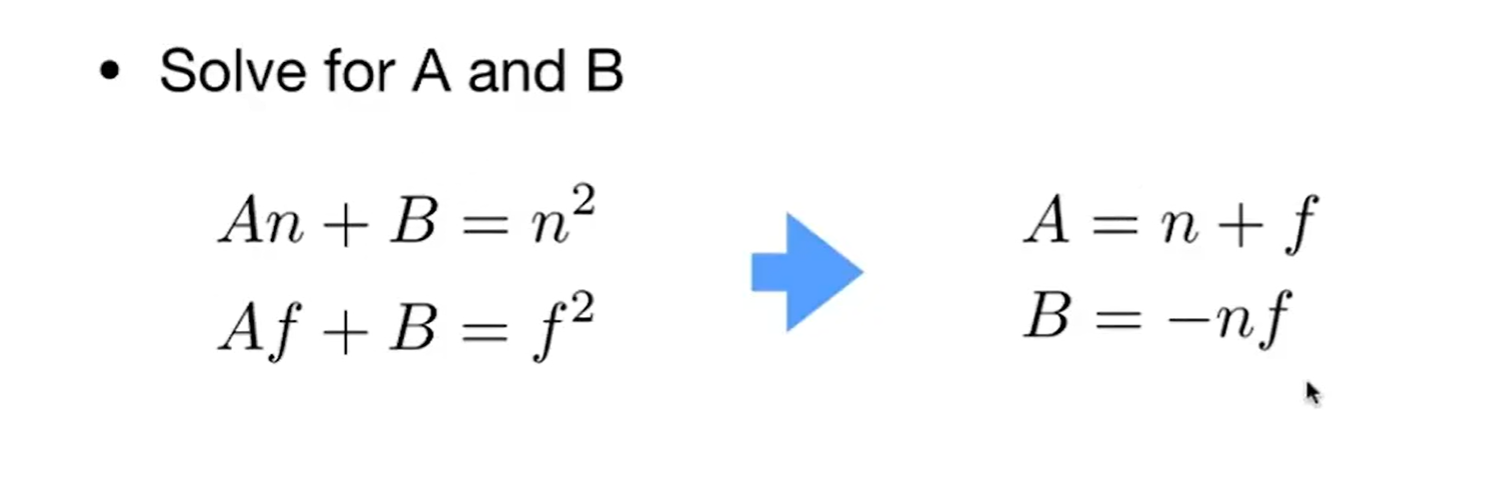
近平面性质: 所有点不变,即乘M后仍然不变
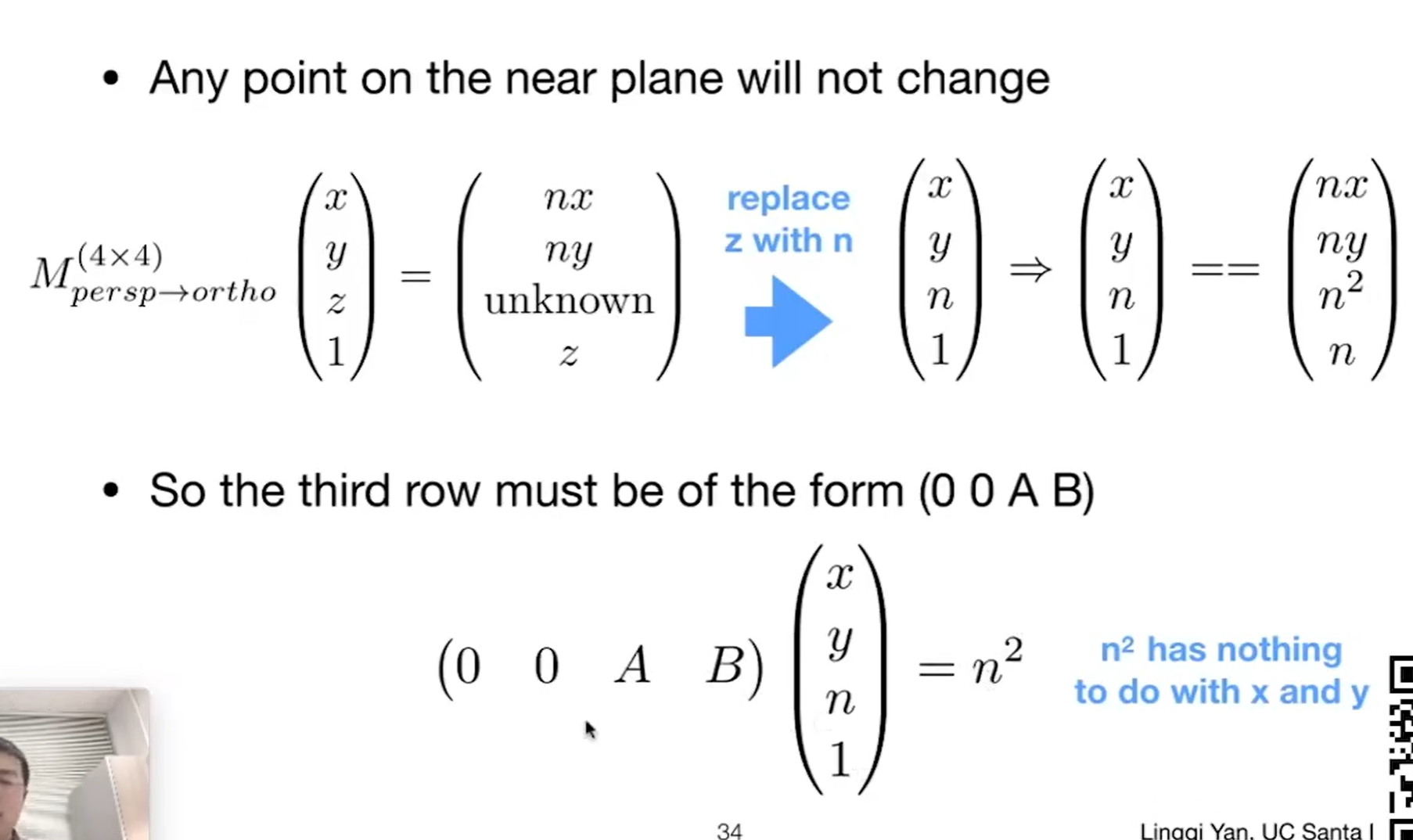
这里我们取近平面的任意一点,做投影变换,由于点不会变,所以输入(x,y,n,1)得到的还是(x,y,n,1),然后将结果同乘n(这里z坐标为n),即(nx,ny,n2,n)这里是为了凑形式,我们就能得到第三行的等式(0 0 A B)*(x y n 1)为n2,原因是n2 一定与x,y无关,所以x,y均为0
远平面性质:中心点不变
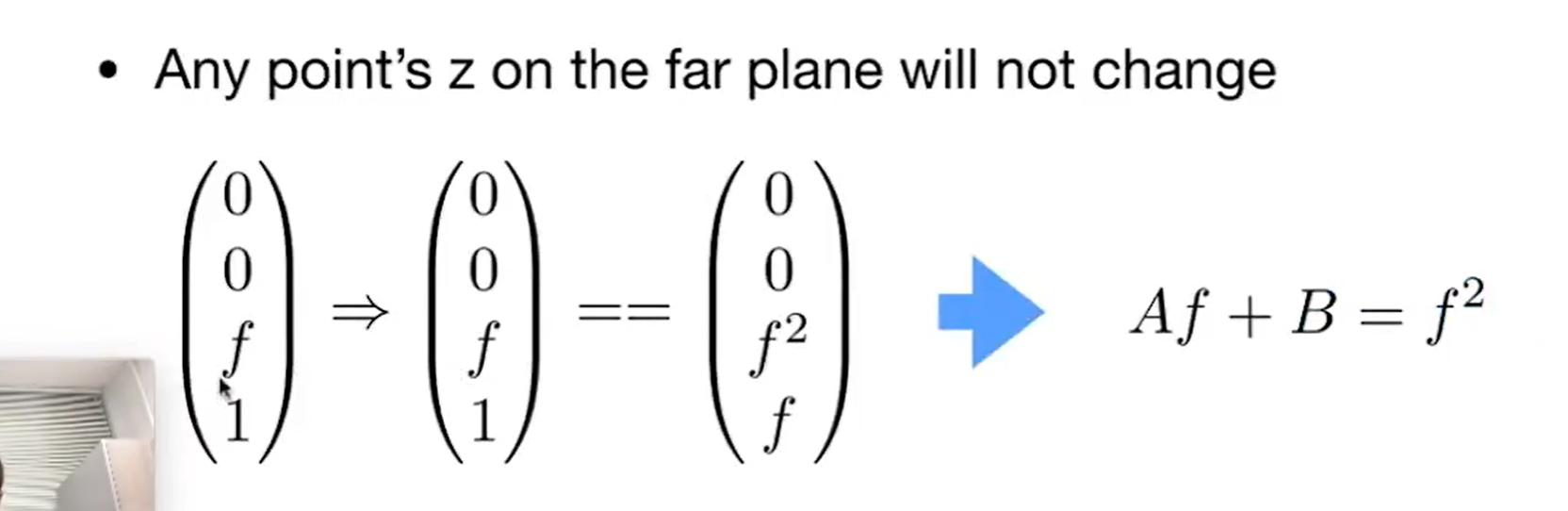
即(0,0,f,1)输入后仍为(0,0,f,1),同理,同时乘z(这里的z坐标为f),又可以得到一个关系式
结果:
12.视锥参数
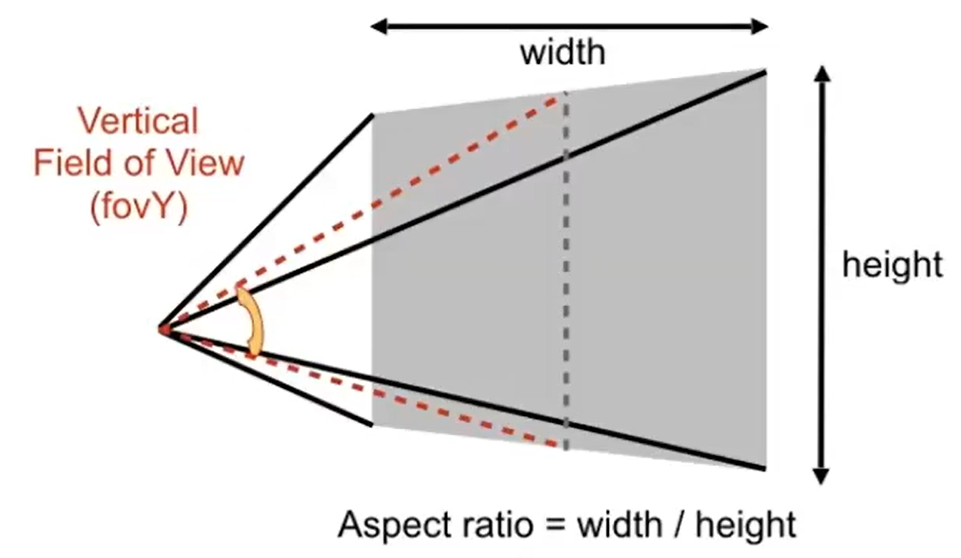
宽高比,fov角

















 529
529

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









