








 本文详细介绍了在ROS环境中从零开始创建并编译工作空间的步骤,包括下载示例代码、安装依赖包、升级Gazebo版本、编译示例以及运行仿真程序的过程。
本文详细介绍了在ROS环境中从零开始创建并编译工作空间的步骤,包括下载示例代码、安装依赖包、升级Gazebo版本、编译示例以及运行仿真程序的过程。
本篇博客介绍如何在ROS中创建工作空间并编译示例。
首先创建工作空间,并下载示例:
cd ~
mkdir -p tutorial_ws/src
cd tutorial_ws/src
git clone https://github.com/DroidAITech/ROS-Academy-for-Beginners.git安装依赖:
cd ~/tutorial_ws
rosdep install --from-paths src --ignore-src --rosdistro=indigo -y其中,--rosdistro=indigo中,indigo替换为自己的ROS版本。
升级gazebo,ubuntu 16确保gazebo版本在7.0以上,ubuntu14可选择4.0:
gazebo -v
# 如果低于7.0,gazebo*中的*号替换为你安装的版本
sudo apt-get remove gazebo*
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install gazebo4
sudo apt-get install ros-indigo-gazebo4-ros-pkgs ros-indigo-gazebo4-ros-control编译示例:
cd ~/tutorial_ws
catkin_make
rospack profile其中catkin_make命令是对工作空间中的所有项目进行编译,编译完成后,采用rospack profile 或 source ~/tutorial_ws_devel/setup.bash刷新一下工作空间的环境,否则找不到工作空间。一般地,为了打开终端就能够运行工作空间中编译好的ROS程序,通常把source ~/tutorial_ws_devel/setup.bash命令追加到~/.bashrc 文件中,这样每次打开终端,系统就会刷新工作空间环境,添加命令。
echo "source ~/tutorial_ws/devel/setup.bash" >> ~/.bashrc
运行仿真程序:
rospack profile
roslaunch robot_sim_demo robot_spawn.launch如果运行之后黑屏(需要等两分钟,如果不行再根据https://blog.youkuaiyun.com/qq_39989653/article/details/78472097 进行修改)。

可以看到仿真画面启动,包括了软件博物馆和Xbot机器人模型。
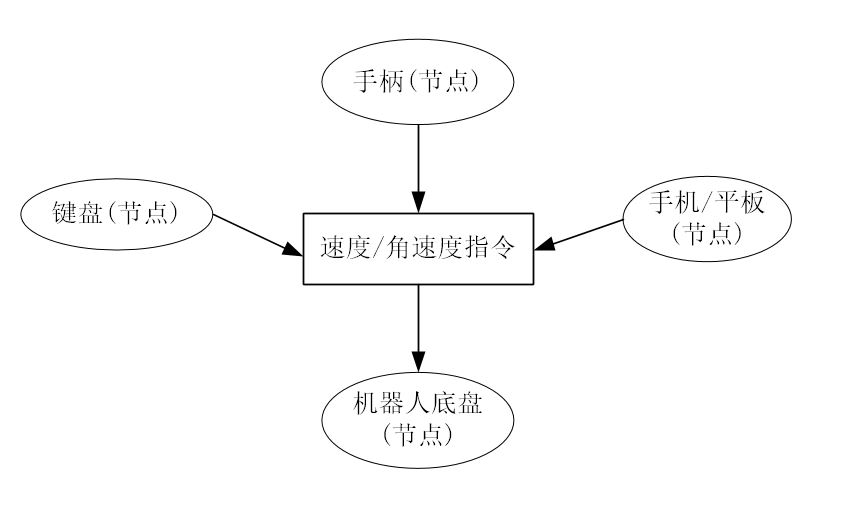
再打开一个终端,输入如下命令,可以实现用键盘控制机器人移动:
rosrun robot_sim_demo robot_keyboard_teleop.py
聚焦控制程序窗口,按下i、j、l等按键,这样你就可以通过键盘来控制机器人的移动了。

















 5967
5967

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









