



操作系统:Windows11 23H2
内存大小:32G
GPU型号: 4070ti super
GPU驱动: 576.80
CUDA版本: 12.8
目录
在Windows环境中玩转《Lerobot机械手臂训练》需要分两步走:(1)配置环境。(2)运行项目
(一)配置环境
配置环境可以分3步走:(1)配置GPU驱动(2)安装CUDA(3)安装IsaacSim与IsaacLab。
(1)配置GPU驱动
为了环境的稳定,建议更新GPU驱动为官方推荐最新版本,Technical Requirements。

点击上方链接,根据显卡型号选择驱动版本,其中50、40系、30系乃至20系显卡推荐选择的驱动版本都为576.80,链接为GeForce Game Ready Driver 576.80 | Windows 11 | NVIDIA,
安装方法:点击链接下载驱动安装程序,一路点击安装即可。(中间如果有jqurey脚本运行错误,不用管)。安装完重启。
(2)安装CUDA
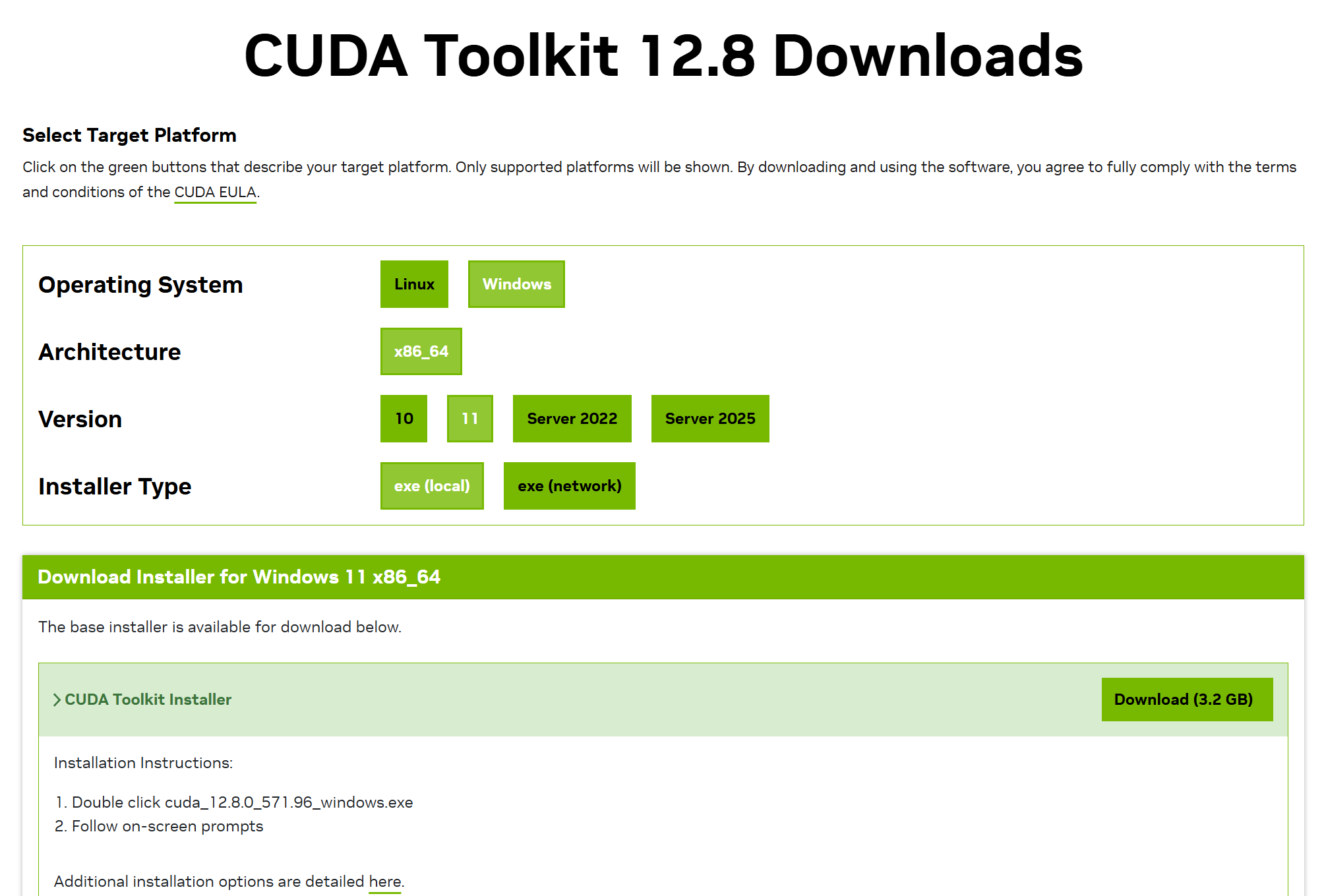
适配IsaacSim和IsaacLab最新的CUDA是12.8,因此我们安装12.8版本:CUDA Toolkit 12.8 Downloads | NVIDIA Developer
安装方法:点击上方链接下载对应版本的local exe,根据提示点击安装即可(注意不要修改驱动)
(3)安装IsaacSim与IsaacLab
官网有很多种安装方法,为了开发的方便,我们选择Conda环境中的pip安装。
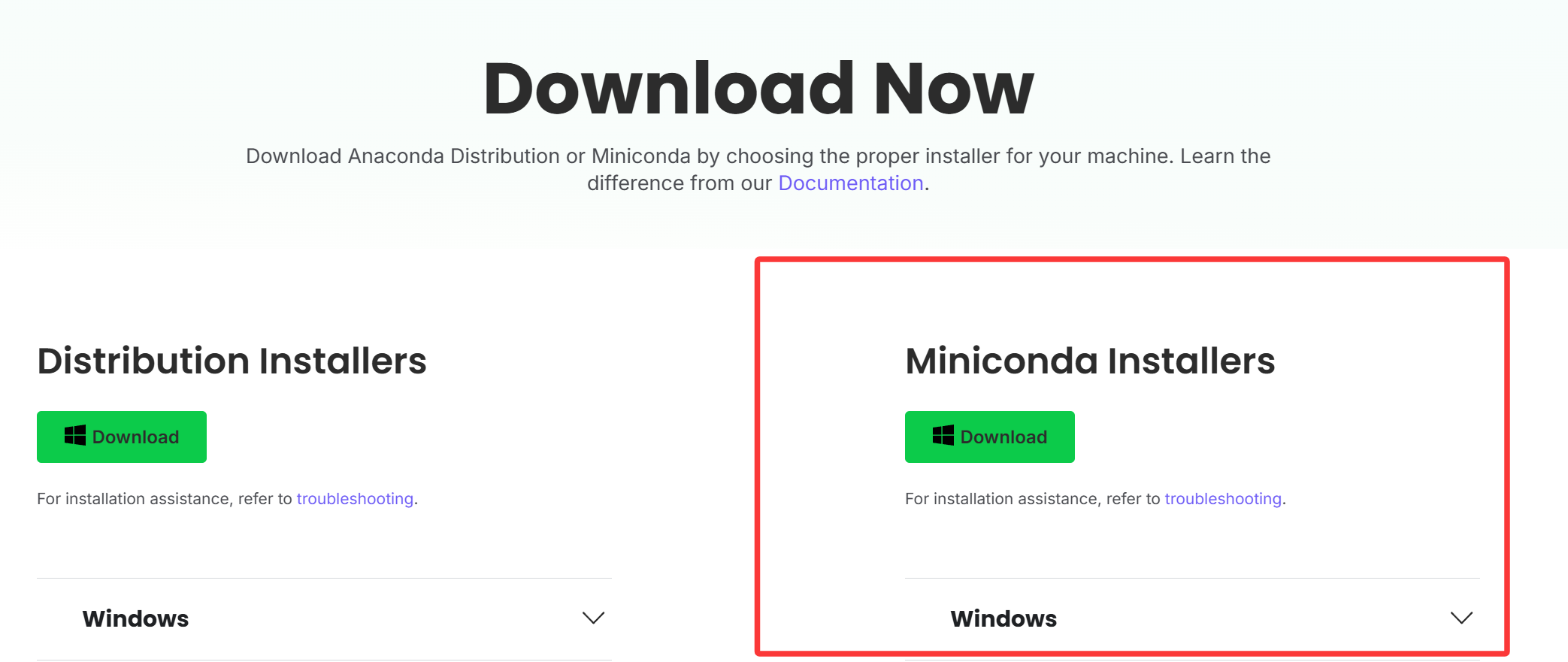
(a) 安装Miniconda
链接地址: Download Success | Anaconda
点击右边的MiniConda下载,下载完成后一路点击ok即可安装
(b) 安装IsaacSim与IsaacLab
以下内容来自官网的pip安装文档Installation using Isaac Sim pip — Isaac Lab Documentation
1. 安装isaacsim
在终端CMD或者powershell里运行如下的命令
# 使用conda创建python虚拟环境
conda create -n env_isaaclab python=3.11
conda activate env_isaaclab
# pip安装
python -m pip install --upgrade pip
pip install torch==2.7.0 torchvision==0.22.0 --index-url https://download.pytorch.org/whl/cu128
pip install "isaacsim[all,extscache]==5.0.0" --extra-index-url https://pypi.nvidia.com
# 验证isaacsim 安装
isaacsim # 然后运行后根据提示输入yes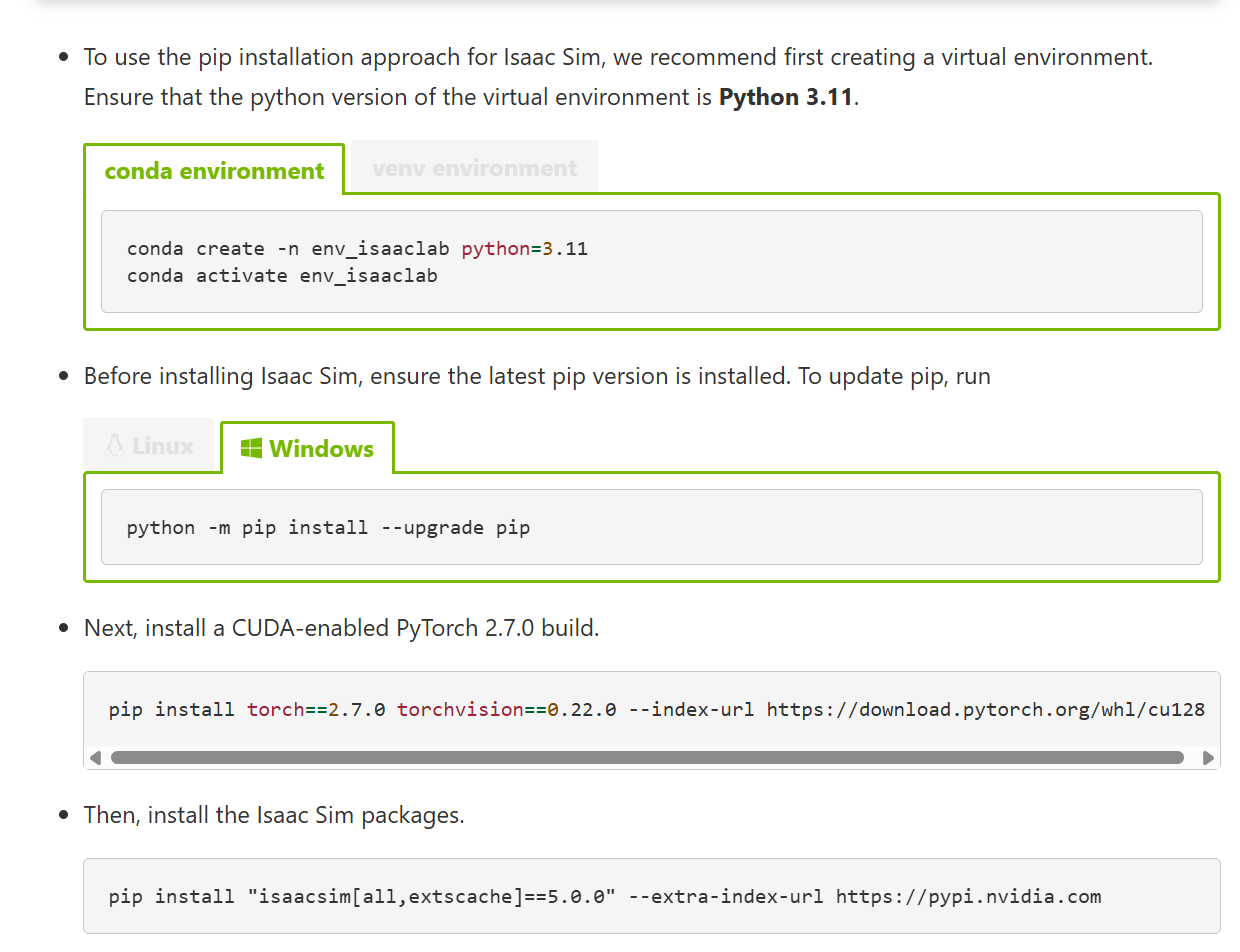
2. 安装isaacLab
根据官方文档 执行如下代码
git clone https://ghproxy.cn/https://github.com/isaac-sim/IsaacLab.git # 采用https的方法克隆代码 并且这里用了代理
cd IsaacLab # 进入克隆的代码目录
isaaclab.bat --install # 注意不要复制#号 也不要复制官网中的::号往后的内容等待执行完毕即可(提醒:安装脚本需要翻墙下代码)
不必理会pip's dependency resolver报错

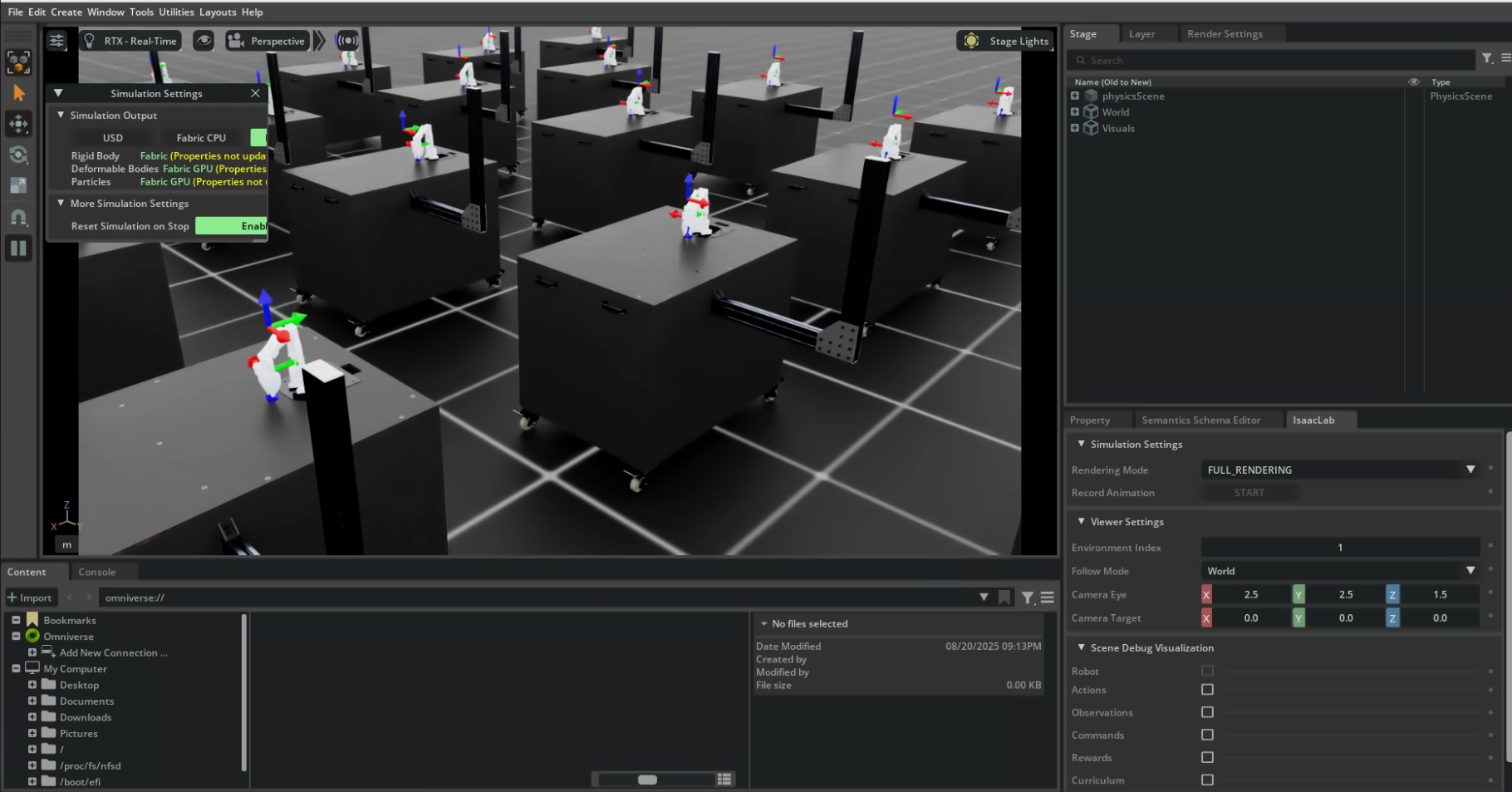
3. 验证安装
python scripts\tutorials\00_sim\create_empty.py # 需要等待一会儿 需要翻墙下资产当命令行出现如下提示后,表示安装正常

以上配置好了所有的环境。下面让我们运行项目代码吧!
(二)运行项目
以下内容经授权摘自:用Isaac Lab玩转《 LeRobot 机械手臂训练》-腾讯云开发者社区-腾讯云
并将isaacLab环境修改为conda环境
(1)下载项目代码
这里我们使用 https://github.com/MuammerBay/isaac_so_arm101 资源来做示范,这是个结合 IsaacLab 与 LeRobot 的 SO-101 机械手臂项目,使用起来也很简单,我们只要下载这个项目到本地,然后训练模型
# 激活之前创建的conda环境 (如果没有激活的话)
conda activate env_isaaclab
# 克隆代码(这里加了代理)
git clone https://ghproxy.cn/https://github.com/MuammerBay/isaac_so_arm101
# 安装项目
cd isaac_so_arm101
python -m pip install -e source/SO_100(2)初探项目内容
接下去执行以下指令,看看这个项目提供那些项目:
python scripts/list_envs.py会出现以下列表,这里显示有两组/4个可执行的任务:

其中第一组 SO-ARM100-Lift-Cube-v0 与 SO-ARM100-Lift-Cube-Play-v0 是本次要演示的 “抓举积木" 任务,前面一个负责模型训练、后面一个则是显示执行的结果。
不过在执行这个任务之前,我们用第4个任务 “SO-ARM100-Reach-Play-v0“ 来感受一下这个项目的内容。请执行下面指令:
python scripts/zero_agent.py --task SO-ARM100-Reach-Play-v0由于 "zero_agent.py" 并没有给设备任何动作指令,因此会出现下面结果,仔细看一下所有手臂都没有任何动作!
再执行下面的 "random_agent.py"指令,会出现与上面画面相同内容,不过将手臂放大之后,会看到手臂在不断抖动,因为这里是给每个手臂 “随机” 指令。
python scripts/random_agent.py --task SO-ARM100-Reach-Play-v0(3)训练抓举积木
好了,体验完上面两个简单指令之后,接下去就要正式进入我们 “抓举积木” 的模拟应用了。这里分为两个步骤:
1. 训练模型:
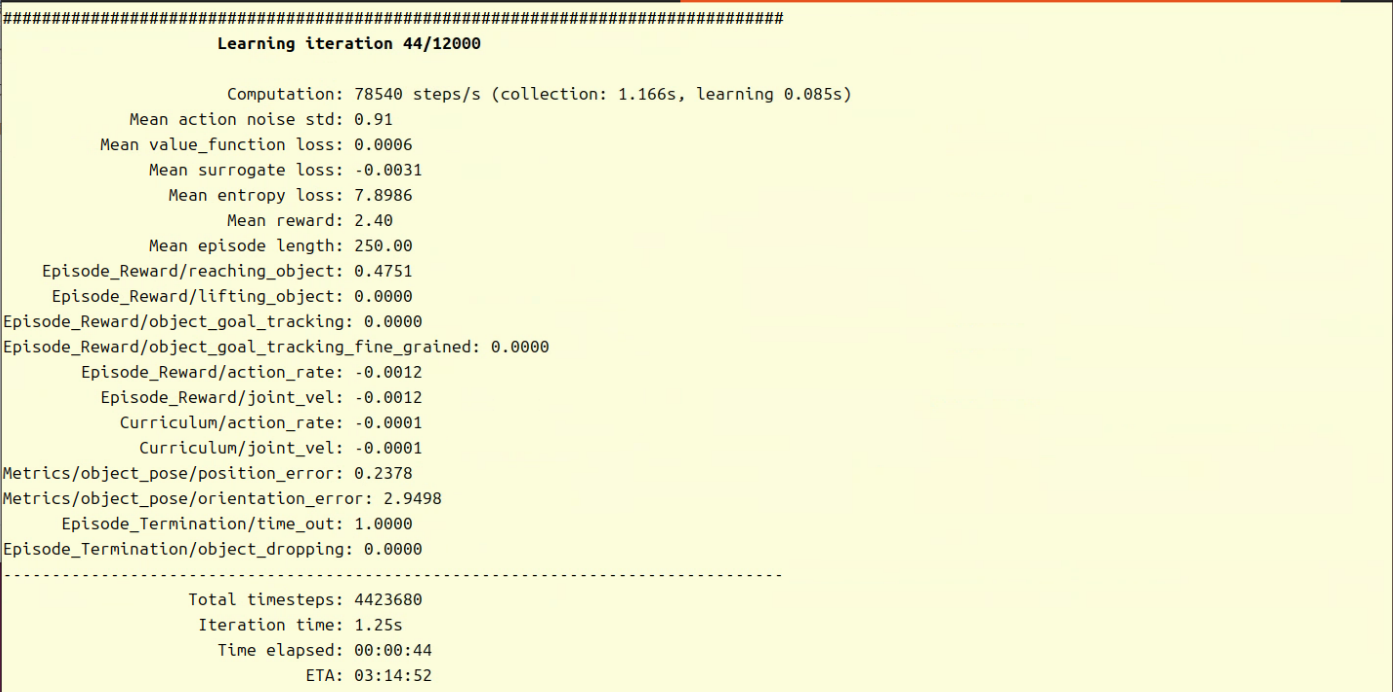
这里我们将任务指定为 SO-ARM100-Lift-Cube-v0,并且设定为不显示(--headless)模式以提高效率,最后一个参数是设定训练的回合数,为确保模型的效果,这里设置 "--max_iterations 12000"。
python scripts/rsl_rl/train.py --task SO-ARM100-Lift-Cube-v0 --headless --max_iterations 12000根据我们在 NVIDIA RTX 4060 Ti / 16GB 显存配置上运行,这个 12000 次的训练耗时不到 4 个小时,因此这个数字请大家自行调整。训练过程所显示的信息如下图:
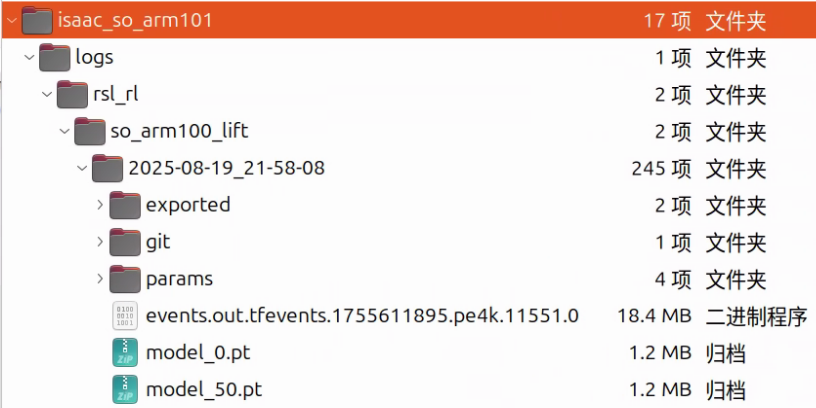
训练的模型会存放在 isaac_so_arm101/logs/rsl_rl/so_arm100_lift/<根据日前时间创建目录> 下,每 50 回合存一个model_<nnnnn>.pt 模型文件,如下图:
现在就是等待模型训练了!
2. 执行模拟
最后就是要验收成果了。我们用 "--checkpoint" 指定要使用的模型,通常会选择最后一个完成(数字最大)的模型,完整的指令如下:
python scripts/rsl_rl/play.py --task SO-ARM100-Lift-Cube-Play-v0 \
--checkpoint logs/rsl_rl/so_arm100_lift/<模型存放目录>/model_11999.pt好了,启动之后将手臂放大,应该就能看到桌上生成一个方形积木,然后机械手臂将其夹住再往上举起的动作。

到了这一步就完成本次实验的内容!【完】


















 7278
7278



 到【灌水乐园】发言
到【灌水乐园】发言








