






我的使用安装环境是Ubuntu20,使用vscode+cmake进行编译与调试。
安装KDL库前必须安装好Eigen库。
KDL库是机械臂的运动学、动力学、轨迹规划的开源第三方库,功能强大。
一、Eigen库安装
首先可以搜索一下
sudo apt search eigen3
然后就出来了这几个选择,选择一个安装,很多其他的库安装也可以先搜索一下,这个命令还挺好用的
sudo apt install libeigen3-dev
二、KDL库安装
首先将远程代码仓的代码拷贝到本地
git clone https://github.com/orocos/orocos_kinematics_dynamics.git
然后切换到对应的目录
cd orocos_kinematics_dynamics/
cd orocos_kdl
然后创建build文件夹
mkdir build
然后编译以及安装
cd build
cmake ..
make
sudo make install
正常来说到这里KDL库就已经安装好了。
三、KDL库使用
找个新的文件夹,打开命令行,执行(目的是运行vscode打开当前文件夹)
code .
然后创建CMakeLists.txt以及main.cc两个文件
CMakeLists.txt中内容为:
cmake_minimum_required(VERSION 3.10)
project(learn_kdl)
find_package(Eigen3 REQUIRED CONFIG)
find_package(orocos_kdl REQUIRED)
add_executable(main main.cc)
target_link_libraries(main Eigen3::Eigen orocos-kdl orocos-kdl-models)
main.cc中的内容参考的KDL源码下的examples文件夹下的trajectory_example.cpp
内容如下
/**
* \file path_example.cpp
* An example to demonstrate the use of trajectory generation
* functions.
*
* There are is a matlab/octave file in the examples directory to visualise the results
* of this example program. (visualize_trajectory.m)
*
*/
#include <frames.hpp>
#include <frames_io.hpp>
#include <trajectory.hpp>
#include <trajectory_segment.hpp>
#include <trajectory_stationary.hpp>
#include <trajectory_composite.hpp>
#include <trajectory_composite.hpp>
#include <velocityprofile_trap.hpp>
#include <path_roundedcomposite.hpp>
#include <rotational_interpolation_sa.hpp>
#include <utilities/error.h>
#include <utilities/utility.h>
#include <trajectory_composite.hpp>
int main(int argc,char* argv[]) {
using namespace KDL;
// Create the trajectory:
// use try/catch to catch any exceptions thrown.
// NOTE: exceptions will become obsolete in a future version.
try {
// Path_RoundedComposite defines the geometric path along
// which the robot will move.
//
Path_RoundedComposite* path = new Path_RoundedComposite(0.2,0.01,new RotationalInterpolation_SingleAxis());
// The routines are now robust against segments that are parallel.
// When the routines are parallel, no rounding is needed, and no attempt is made
// add constructing a rounding arc.
// (It is still not possible when the segments are on top of each other)
// Note that you can only rotate in a deterministic way over an angle less then PI!
// With an angle == PI, you cannot predict over which side will be rotated.
// With an angle > PI, the routine will rotate over 2*PI-angle.
// If you need to rotate over a larger angle, you need to introduce intermediate points.
// So, there is a common use case for using parallel segments.
path->Add(Frame(Rotation::RPY(PI,0,0), Vector(-1,0,0)));
path->Add(Frame(Rotation::RPY(PI_2,0,0), Vector(-0.5,0,0)));
path->Add(Frame(Rotation::RPY(0,0,0), Vector(0,0,0)));
path->Add(Frame(Rotation::RPY(0.7,0.7,0.7), Vector(1,1,1)));
path->Add(Frame(Rotation::RPY(0,0.7,0), Vector(1.5,0.3,0)));
path->Add(Frame(Rotation::RPY(0.7,0.7,0), Vector(1,1,0)));
// always call Finish() at the end, otherwise the last segment will not be added.
path->Finish();
// Trajectory defines a motion of the robot along a path.
// This defines a trapezoidal velocity profile.
VelocityProfile* velpref = new VelocityProfile_Trap(0.5,0.1);
velpref->SetProfile(0,path->PathLength());
Trajectory* traject = new Trajectory_Segment(path, velpref);
Trajectory_Composite* ctraject = new Trajectory_Composite();
ctraject->Add(traject);
ctraject->Add(new Trajectory_Stationary(1.0,Frame(Rotation::RPY(0.7,0.7,0), Vector(1,1,0))));
// use the trajectory
double dt=0.1;
std::ofstream of("./trajectory.dat");
for (double t=0.0; t <= traject->Duration(); t+= dt) {
Frame current_pose;
current_pose = traject->Pos(t);
for (int i=0;i<4;++i)
for (int j=0;j<4;++j)
of << current_pose(i,j) << "\t";
of << "\n";
// also velocities and accelerations are available !
//traject->Vel(t);
//traject->Acc(t);
}
of.close();
// you can get some meta-info on the path:
for (int segmentnr=0; segmentnr < path->GetNrOfSegments(); segmentnr++) {
double starts,ends;
Path::IdentifierType pathtype;
if (segmentnr==0) {
starts = 0.0;
} else {
starts = path->GetLengthToEndOfSegment(segmentnr-1);
}
ends = path->GetLengthToEndOfSegment(segmentnr);
pathtype = path->GetSegment(segmentnr)->getIdentifier();
std::cout << "segment " << segmentnr << " runs from s="<<starts << " to s=" <<ends;
switch(pathtype) {
case Path::ID_CIRCLE:
std::cout << " circle";
break;
case Path::ID_LINE:
std::cout << " line ";
break;
default:
std::cout << " unknown ";
break;
}
std::cout << std::endl;
}
std::cout << " trajectory written to the ./trajectory.dat file " << std::endl;
delete ctraject;
} catch(Error& error) {
std::cout <<"I encountered this error : " << error.Description() << std::endl;
std::cout << "with the following type " << error.GetType() << std::endl;
}
}
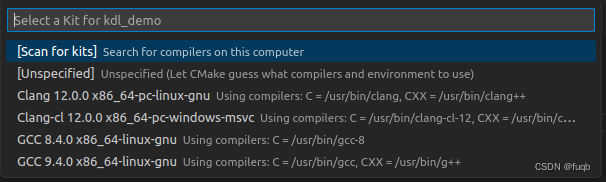
然后在vscode的最底下这栏,设置好编译器,我用的是clang,也可以用其他的,比如gcc,如果没有需要自行安装。

还需要在vscode中安装好c++以及cmake的扩展
好了,一切就像,可以开始编译了,点击vscode的最底下这栏的build,然后开始编译
没有问题的话就可以运行编译出来的可执行文件了,

最底下这栏,可以设置是debug模式还是release模式,点击三角形或者虫子符号,就可以运行了,最右边的main是可执行文件名称,如果有多个可执行文件,可以执行哪个。
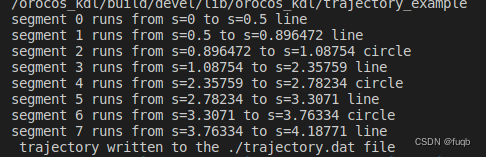
执行结果如上所示,结束。

















 6811
6811

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









