



基于触觉感知的具老化感知手势识别系统
摘要
人类手势能够表达丰富的信息,因此手势识别技术在人机交互中得到越来越广泛的应用。在采用压阻传感器设计的手势识别系统中,由于传感器老化,准确率会下降。本文设计了一种基于压阻传感器的可穿戴手势识别系统。通过在传感器不同老化阶段采集少量数据集并重新训练算法,延长了系统的使用寿命。
I. 引言
触觉作为一种重要的感知形式,正受到越来越多的关注。最近,赵H.等人[1]展示了可拉伸光波导,能够感知物体的形状和柔软度。此外,一种可扩展触觉手套已被用于识别单个物体[2]。同时,通过触觉还可以感知人的手势。
本文中,我们使用压阻传感器制作了一款触觉手套,并在手套上共分布了29个压阻传感器。当人们做出不同的手部动作时,会在不同位置和数量的传感器上施加不同的压力。
因此,我们可以通过传感器阵列的数据实现手势识别。通过采集手部动作数据集并训练神经网络模型,可实现高精度的手势识别。
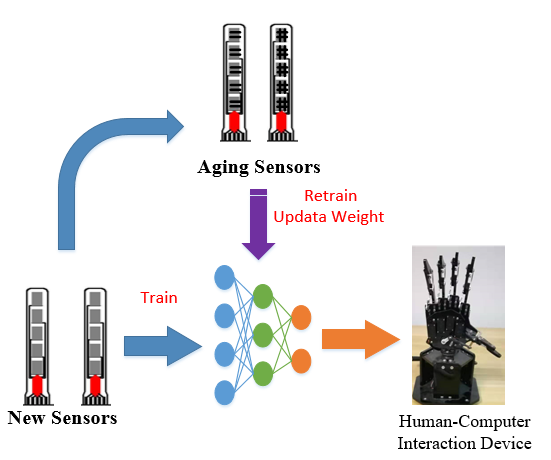
然而,传感器老化是一个不可避免的问题。传感器老化会导致其参数发生漂移,从而影响手势识别的准确性。通过收集少量老化传感器的数据,并在原有的神经网络模型上进行重训练,识别准确率得到了显著提升。如图1所示,通过使用重训练算法,我们构建了一个具有老化感知能力的手势识别系统。
II. 压阻传感器的特性
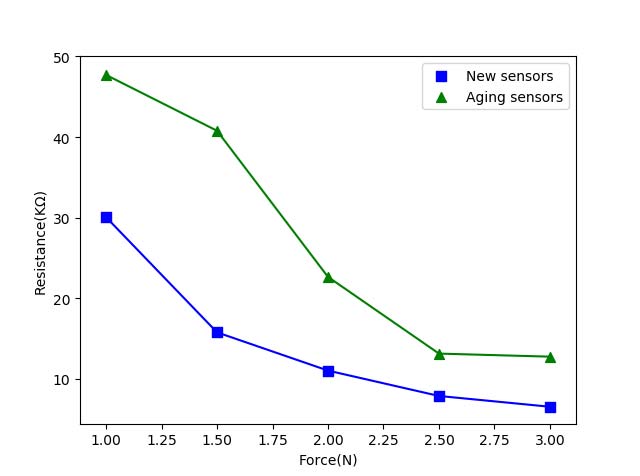
压阻薄膜传感器单元便宜但不够精确。当压力恒定时,电阻处于一定范围内,并且在长时间弯曲后电阻值也会发生漂移。经过长时间弯曲后,电阻值同样会发生漂移。我们测试了新传感器和老化传感器的压力与电阻值之间的关系。如图2所示,在相同压力下,老化传感器的电阻大于新传感器的电阻,且当压力值较小时,老化传感器会使电阻值产生较大偏差。
III. 算法训练与重训练
深度神经网络在许多分类领域取得了最先进的成果。但包含大量浮点乘加运算的传统深度神经网络对硬件的计算能力要求较高。库尔巴里亚M.等人提出了 BinaryConnect神经网络模型[3]。其权重被限制为两个值(例如‐1或1),这将为硬件带来巨大优势。本文比较了传感器老化后传统深度神经网络与BinaryConnect神经网络模型的识别精度。
本文旨在识别美国手语中的0‐9数字手势,如图3所示。
首先,我们为每位志愿者的每个手势收集了120组数据,其中包括100组数据作为训练集1和20组数据作为测试集1,共收集了10名志愿者的手势数据。
我们使用 TensorFlow 构建了相同的模型,用于传统深度神经网络和 BinaryConnect神经网络。该神经网络模型在输入层有29个神经元,隐藏层有20个神经元,输出层有10个神经元。隐藏层的激活函数为Sigmoid,输出层的激活函数为Softmax。使用随机梯度下降算法训练该网络模型。使用训练集1训练得到的神经网络模型称为初始神经网络模型。

IV. 系统架构
图5展示了电路方案。分布在手套上的传感器阵列感知压力并产生模拟信号。模拟多路复用器ADG731依次将其中一个模拟输入信号切换至集成运算放大器AD8651。然后,AD8651输出的模拟信号被发送到微控制器。本文中的微控制器为STM32F407ZET6,其内部包含一个分辨率可配置的模数转换器(ADC)。该微控制器中的ADC将模拟信号转换为12位分辨率数字信号。在微控制器上运行的 BinaryConnect神经网络根据这些数字信号进行计算得出结果。最后,微控制器控制蓝牙模块向人机交互(HCI)设备发送指令。本文中,通过蓝牙模块将手势分类结果发送至机械手掌,从而使机械手掌能够根据接收到的信号做出相同的手势。该系统的平均识别时间为16ms。


V. 结论
本文通过重训练神经网络模型,降低了传感器老化对分类准确率的影响,提高了神经网络的鲁棒性。该方法可显著延长系统的使用寿命。

















 10
10

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









