




每日一言
努力不会立刻开花结果,但会在未来某一天惊艳所有人。

智能小车项目
我们的只能小车项目开始搭建了
组装小车:

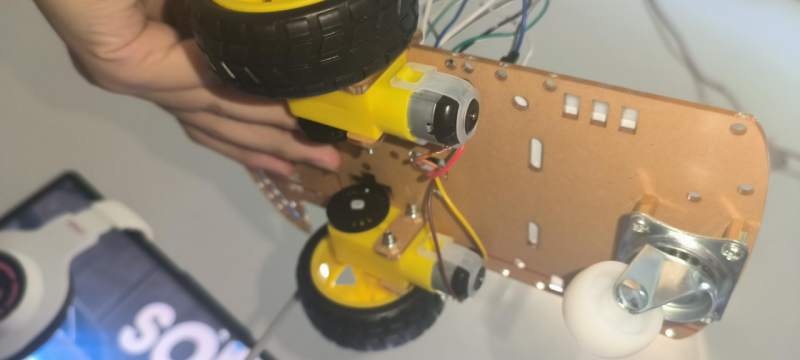
这边需要用到4个电池的电池盒用作对电机的驱动,因为单片机的电压不稳,到时候会有很多模块,主要还是因为单片机是用于烧写程序的是作为大脑的,怎么可以做非专工的事情,大材小用了....
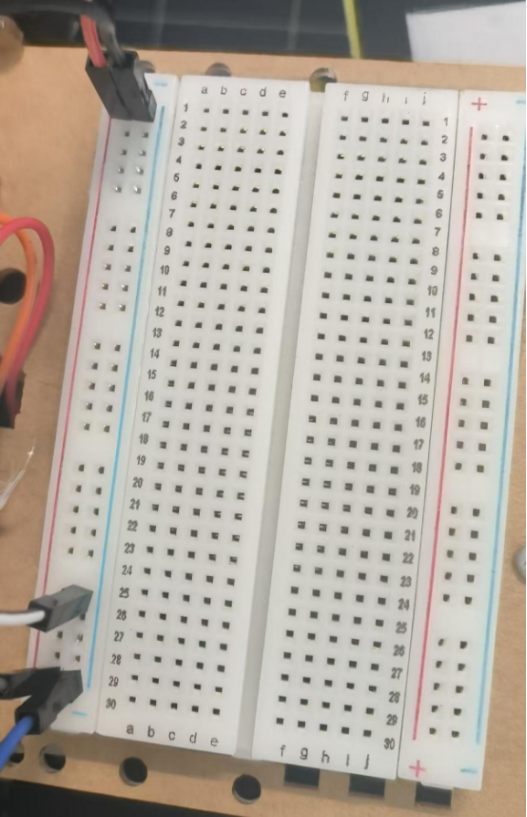
那么这边就需要用到面包板,面包板很多孔位可以对模块进行供电,只要电源接上正极和负极,还有模块的VCC和GND接上面包板的正极和负极
对了这边我们需要将单片机上接一个GND到面包板的负极这个是为什么???
总结一下,单片机接地(连 GND 到面包板负极 )是让自身和整个系统 “能正常供电、信号识别准、抗干扰能力强、外设协同好” 的基础,缺了这一步,单片机系统基本没法稳定工作,就像盖房子没打地基,肯定没法盖起来~
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 887
887



 到【灌水乐园】发言
到【灌水乐园】发言










