




每日一言
别等准备好了才出发,出发了自然会找到前行的路。
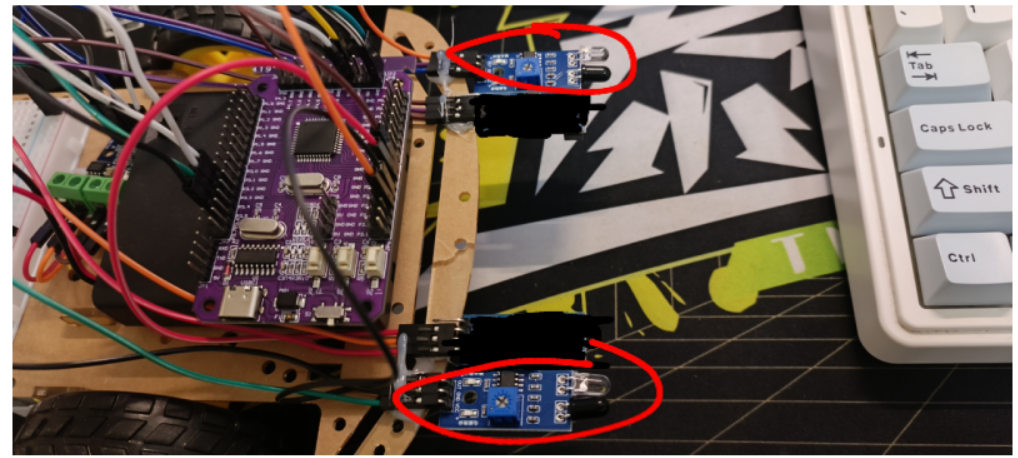
案例:跟随小车
跟随小车是什么意思呢??就是小车会跟着你..........
硬件:红外避障传感器模块
左
每日一言
别等准备好了才出发,出发了自然会找到前行的路。
跟随小车是什么意思呢??就是小车会跟着你..........
硬件:红外避障传感器模块
左
 6833
1625
5863
6833
1625
5863

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


























