




常用的IMU陀螺仪计算欧拉角方式为:Cortex M0/M3/M4的单片机+六轴陀螺仪如MPU6050,通过MPU6050自带的DMP库,直接输出四元数q0~q4,然后通过欧拉角转换公式直接转换,如:
pitch = asin(-2 * q1 * q3 + 2 * q0 * q2) * 57.3; //俯仰角
roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2 * q2 + 1) * 57.3; //横滚角
yaw = atan2(2 * (q1 * q2 + q0 * q3), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3) * 57.3; //航向角
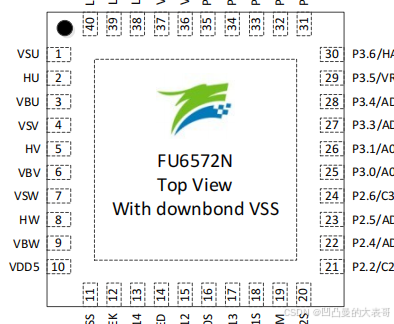
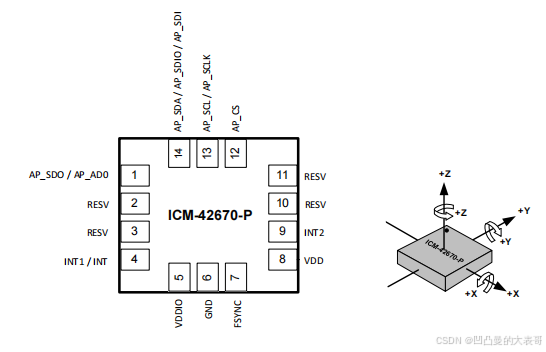
若采用51核的峰岹FU6572N+不带DMP库的ICM42670,可否也能计算出欧拉角呢?
结果当然是OK!并且占用MCU资源少,程序运行快,上电即稳态!
 +
+
关于MCU用IIC或SPI驱动ICM42670的代码网上非常多,可以从别的文章摘录,这里只分享四元数解算欧拉角的方法:
1、第一步配置全局变量:
#include <FU6522.H>
#include "Angle.h"
// 参数配置
#define Kp 10.0f // 比例增益
#define Ki 0.008f // 积分增益
#define halfT 0.01f // 半采样周期(采样率50Hz)
// 全局/静态变量声明
float q0 = 1.0f, q1 = 0.0f, q2 = 0.0f, q3 = 0.0f; // 初始四元数
float exInt = 0.0f, eyInt = 0.0f, ezInt = 0.0f; // 积分误差
float Q_ANGLE_X = 0.0f, Q_ANGLE_Y = 0.0f, Q_ANGLE_Z = 0.0f; // 输出姿态角
2.配置IMU的量程及采样周期等:
因51单片机主频低,采样周期设置小点,50Hz即可;
void ICM42670_Init(void)
{
MPU42670_WriteReg(0x 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 909
909

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









