







配置ubuntu的软件和更新
打开软件和更新


设置安装源(二选一)
清华的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
中科大的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
设置KEY
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
安装
这一步比较耗时,耐心等待
sudo apt update
sudo apt install ros-noetic-desktop-full
配置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装构建依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
sudo apt install python3-rosdep
初始化rosdep
这一步多半会报错
sudo rosdep init
rosdep update
若报错先执行下列步骤在重新初始化
sudo gedit /etc/hosts
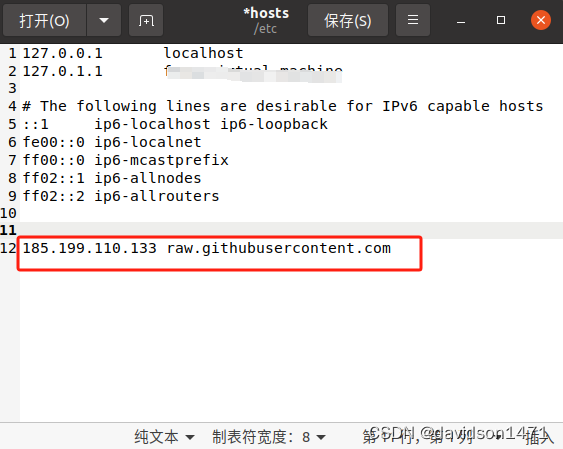
红框内为raw.githubusercontent.com最新地址
IP查询
初始化失败多为网络问题,多尝试几次(可使用手机热点)
测试ROS
启动三个命令行
分别输入:
启动ROS
roscore
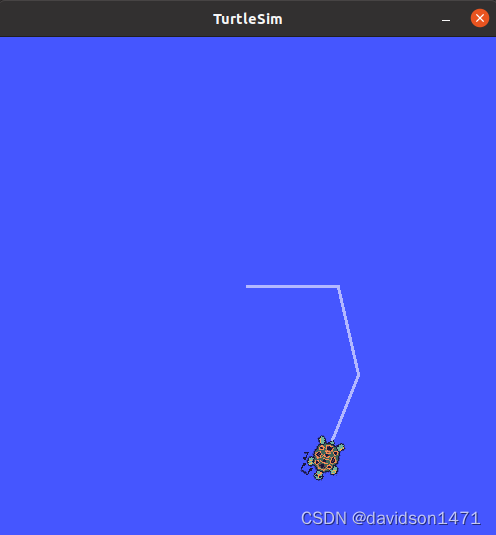
弹出图形化界面
rosrun turtlesim turtlesim_node
键入上下左右控制小海龟移动
rosrun turtlesim turtle_teleop_key

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









