




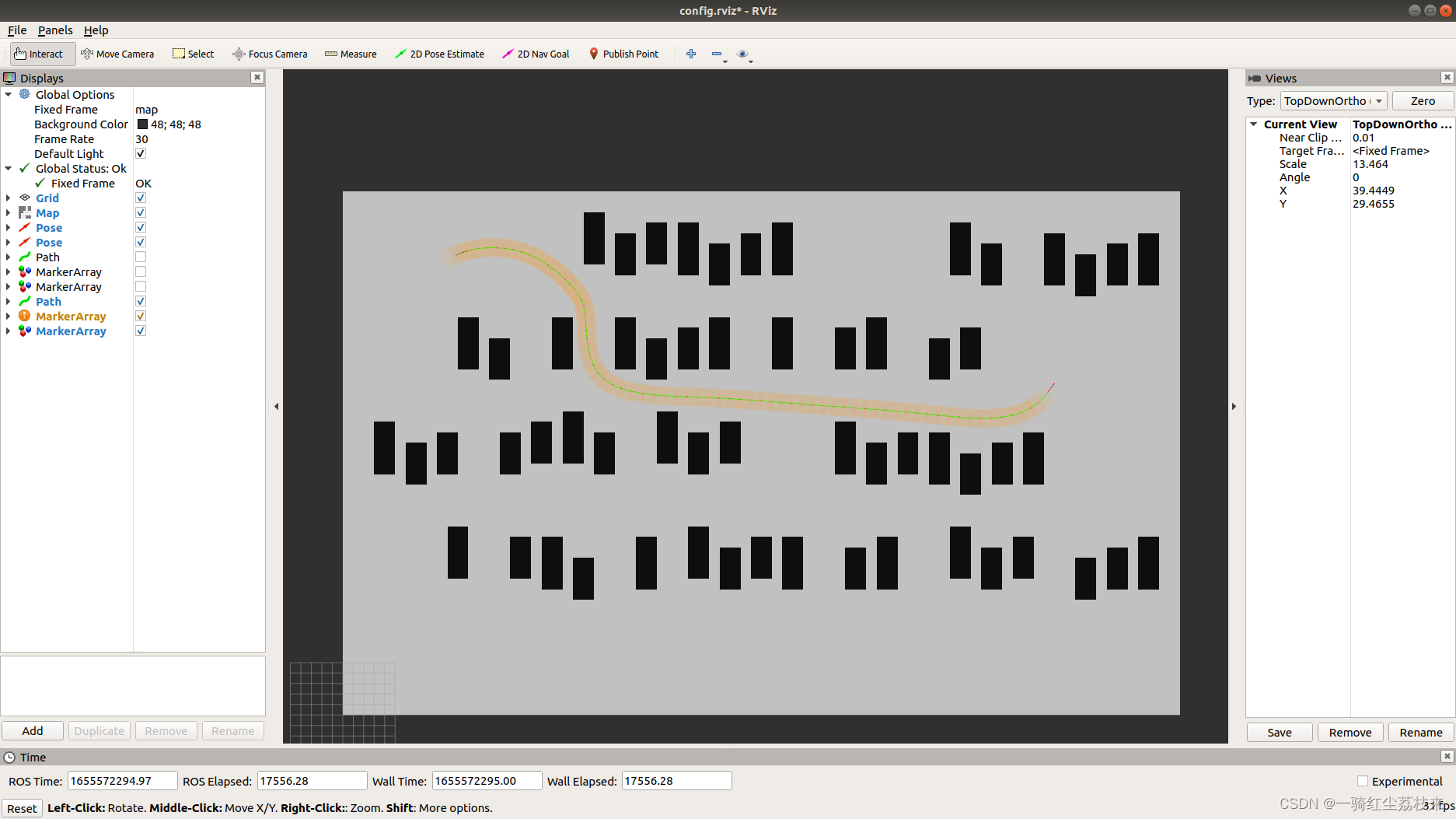
 本文介绍了Karl Kurzer在2015年基于hybridAstar算法的程序,该程序结合了搜索树和A星算法的优点,适用于阿克曼底盘的机器人路径规划。程序通过拓展状态空间和改进启发式提高了搜索效率,但生成的路径非全局最优。程序包括四个部分:hybrid_astar、tf_broadcaster、map_server和rviz,用于路径规划、坐标转换、地图提供和可视化。尽管适用于约束场景,对于差速或全向机器人可能效率较低。
本文介绍了Karl Kurzer在2015年基于hybridAstar算法的程序,该程序结合了搜索树和A星算法的优点,适用于阿克曼底盘的机器人路径规划。程序通过拓展状态空间和改进启发式提高了搜索效率,但生成的路径非全局最优。程序包括四个部分:hybrid_astar、tf_broadcaster、map_server和rviz,用于路径规划、坐标转换、地图提供和可视化。尽管适用于约束场景,对于差速或全向机器人可能效率较低。
1.程序概述
1.1 程序来源
- 程序来源:
Kurzer, Karl写于2015年,算法基于hyridAstar.结合了基于采样和基于搜索的方法的优点.
github 链接 - 算法来源:
程序中涉及到的算法来源于: hybrid A* algorithm developed by Dmitri Dolgov and Sebastian Thrun (Path Planning for Autonomous Vehicles in Unknown Semi-structured Environments DOI: 10.1177/0278364909359210)
1.2 程序的特点
优点:
- 结合了基于搜索树和基于A星的优点.
- 拓展了离散空间的状态.状态的数量和距离目标的距离成反比.便于更快搜索到路径
- 改进了启发式,采用只考虑动作约束的RR启发式和只考虑障碍物的一般启发式的结合,获得了比两者都要好的性能.
缺点:
- 出来的曲线不是全局最优的,需要进行进一步优化.原文中,作者也做了进一步的优化.
- 适用于有约束的场合,如果机器人是差速或者全向的,就没必要使用混合式A星,反而会降低速度.
1.3 适用场景
主要适用于阿克曼底盘的机器人.为其提供一个粗略的初始路径.
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 723
723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









