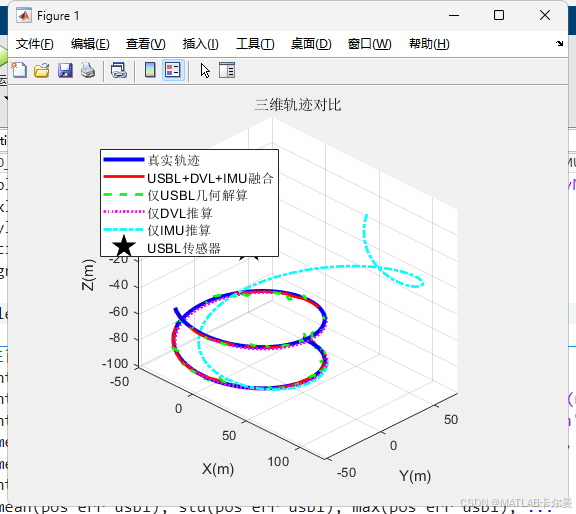
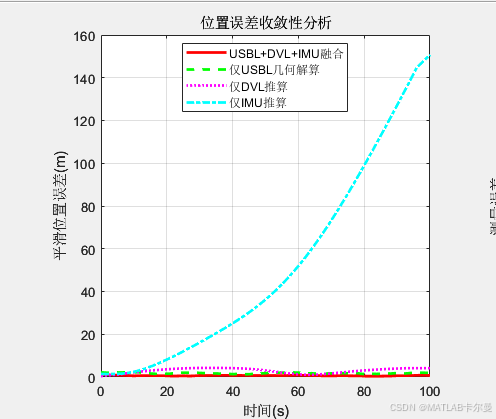
% USBL(超短基线)与DVL(多普勒速度测量仪)、IMU(惯性测量元件)的融合,三维,基于方位角与距离测量的目标定位仿真(EKF实现) 输出结果包含:1) USBL+DVL+IMU融合 2) 仅USBL观测 3) 仅DVL推算 4)仅IMU推算 订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果 运行结果 误差图像: MATLAB源代码 完整代码如下:
 62
176
62
176

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 订阅专栏 解锁全文
订阅专栏 解锁全文

























