




USBL(Ultra Short BaseLine,超短基线)与IMU(Inertial Measurement Unit,惯性测量原件)融合的导航MATLAB代码,真值、USBL观测、IMU推算、EKF融合后的结果,多个对比。给出图片和误差特性的数字分析
订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果
运行结果
轨迹图:
三轴位移曲线:
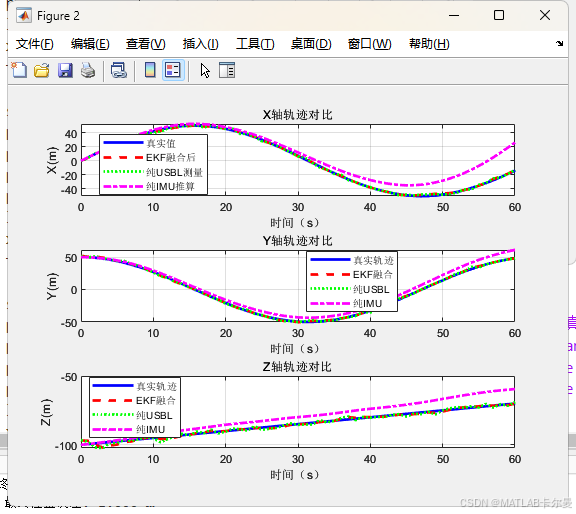
误差对比曲线:
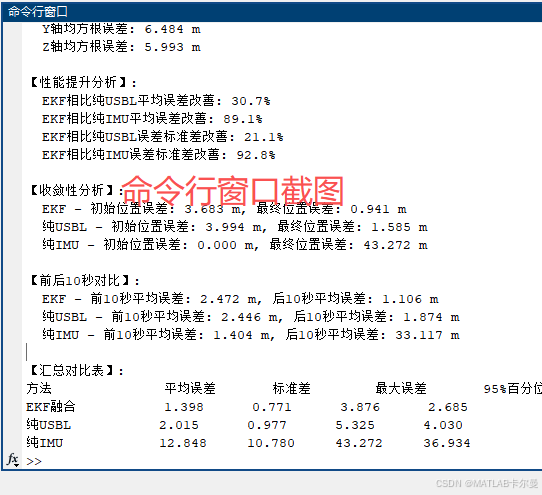
命令行窗口的截图:
MATLAB源代码
完整代码如下:
% USBL(超短基线)定位系统仿真,三维,基于方位角与距离测量的目标定位仿真(EKF实现)
% 观测模型:方位角θ:基于目标与传感器的XY平面投影计算,俯仰角φ:基于高度差和目标水平距离计算,斜距r:欧氏距离

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 408
408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











