






二维状态量的UKF例程,MATLAB,用于非线性滤波,简化版例程,用于普适性的非线性状态估计,状态量和观测量都是非线性的,便于调试和修改。有中文注释
程序概述
这段代码实现了一个简化版的二位状态量的无迹卡尔曼滤波( U K F UKF UKF)的例程,主要用于给出一个普适性的二维滤波框架,便于后期修改为自己需要的滤波结构
核心功能
- 模型初始化:设置时间序列、过程噪声和观测噪声的协方差矩阵,并初始化状态向量和观测值。
- 运动模型:通过迭代过程生成真实状态和未滤波状态,同时计算观测值。
- UKF 处理:
- 生成 sigma 点和权重。
- 预测下一状态和协方差矩阵。
- 进行观测更新,校正状态估计。
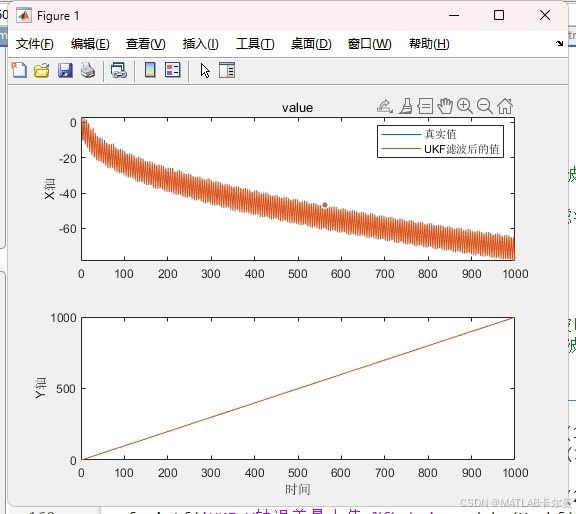
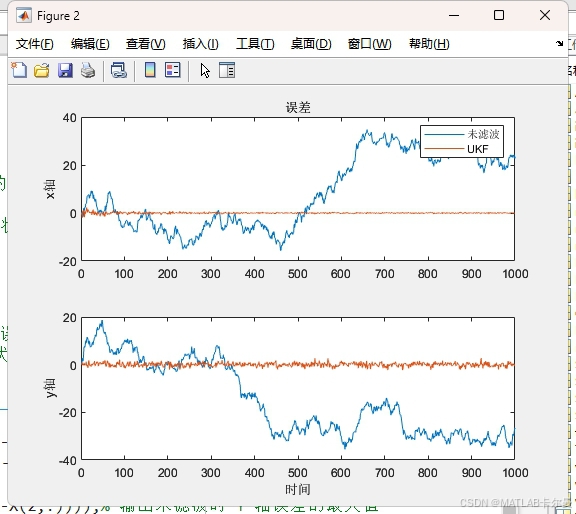
- 结果可视化:绘制真实状态、滤波后的状态、误差比较以及误差的累计概率分布图。
测试结果
各维度状态量的曲线:
各维度的状态量误差曲线:
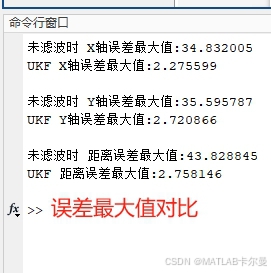
误差最大值对比:
MATLAB源代码
完整代码如下:
% 二维状态量的UKF例程,简化版的例程(没有严格的组合导航推导)
% 作者:matlabfilter
% 2025-08-24/Ver1
clear;clc;close all; %清空工作区、命令行,关闭小窗口
rng(0); %固定随机种子
%% 滤波模型初始化
% 定义时间序列
t = 1:1:1000;
% 过程噪声协方差矩阵和过程噪声
Q = 1*diag([1,1]);
w = sqrt(Q)*randn(size(Q,1),length(t));
% 观测噪声协方差矩阵和观测噪声
R = 1*diag([1,1]);
v = sqrt(R)*randn(size(R,1),length(t));
% 初始状态估计协方差矩阵
P0 = 1*eye(2);
% 初始化状态向量
X = zeros(2,length(t));
% 初始化扩展卡尔曼滤波状态向量
X_ukf = zeros(2,length(t));
X_ukf(:,1) = X(:,1); %给滤波后的状态量赋初值
Z = zeros(2,length(t));% 给观测值分配空间
Z(:,1) = [X(1,1)^2/20;X(2,1)] + v(:,1);% 定义初始观测值
%% 运动模型
% 初始化未滤波的状态向量
X_ = zeros(2,length(t)); %给未滤波的值分配空间
X_(:,1) = X(:,1); %给未滤波的值赋初值
% 运动模型迭代
for i1 = 2:length(t)
% 计算真实状态值
X(:,i1) = [X(1,i1-1) + (2.5 * X(1,i1-1) / (1 + X(1,i1-1).^2)) + 8 * cos(1.2*(i1-1));
X(2,i1-1) + 1];
% 计算未滤波的状态值
X_(:,i1) = [X_(1,i1-1) + (2.5 * X_(1,i1-1) / (1 + X_(1,i1-1).^2)) + 8 * cos(1.2*(i1-1));
X_(2,i1-1) + 1] + w(:,i1-1);
% 计算观测值
Z(:,i1) = [X(1,i1).^2 / 20;X(2,i1)] + v(i1);
end
%% UKF部分
完整代码的下载链接:
https://download.youkuaiyun.com/download/callmeup/91746518
或:


















 125
125

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











