




随着无人驾驶技术和航天探索的快速发展,导航精度的需求日益增加。传统的导航方法在复杂环境中常常面临挑战,因此结合多种导航技术进行融合定位成为一种有效的解决方案。天文导航与惯性导航系统(INS)的结合,利用两者的优势,可以显著提高定位精度与可靠性。
文章目录
将天文导航与惯性导航系统(INS)结合是一种有效的定位和导航方法,尤其在GPS信号不可用或不可靠的环境中。以下是关于这一主题的一些研究方向和思路,适合本科毕业设计:
研究方向
-
融合算法开发
- 内容: 探索不同的融合算法(如卡尔曼滤波、扩展卡尔曼滤波、粒子滤波等),将天文导航和INS的数据结合,以提高定位精度和鲁棒性。
- 方法: 比较不同融合算法在不同环境下(如城市峡谷、海洋等)的表现。
-
系统设计与实现
- 内容: 设计一个基于天文导航和INS的原型系统,包括硬件选择和软件开发。
- 方法: 利用现有的传感器(如加速度计、陀螺仪、天文传感器等),实现数据采集和处理。
-
误差分析与补偿
- 内容: 研究INS在长时间使用中的累积误差(如漂移),并提出有效的误差补偿方法。
- 方法: 分析天文导航提供的绝对位置数据如何用于校正INS的误差。
-
动态环境中的导航
- 内容: 研究在动态环境中(如城市交通)融合天文导航和INS的导航策略。
- 方法: 设计相应的算法,评估在不同交通条件下的导航性能。
-
低成本系统的实现
- 内容: 开发一个低成本的天文导航与INS结合系统,适用于普通用户或小型无人机。
- 方法: 选用经济实惠的传感器,进行系统集成和测试。
实验与测试
-
实验设计
- 在室外环境中进行实验,测试系统在不同天气和光照条件下的表现,尤其是在夜间或信号干扰的情况下。
-
性能评估
- 量化系统的定位精度、响应时间和鲁棒性,比较与单一导航系统(仅INS或仅天文导航)的性能差异。
应用场景
-
无人驾驶与自动驾驶
- 在无人驾驶汽车或无人机中应用该系统,以保证在GPS信号丢失的情况下仍能进行精确导航。
-
海洋与航空导航
- 在海洋航行或航空飞行中,利用天文导航和INS的结合,提高在远离陆地或信号覆盖不良区域的导航能力。
-
灾后救援与应急响应
- 在灾后救援行动中,使用该系统进行快速有效的定位,尤其是在通信基础设施受损的情况下。
天文导航与INS概述
天文导航
天文导航是通过观测天体(如星星、太阳和月亮)位置来确定地面或空中物体的位置。这种方法不依赖于地面基站,因此在远离城市和基础设施的环境中尤其有效。天文导航的精度受限于天文观测的条件,如天气、视野和设备的精度。
惯性导航系统(INS)
INS是一种利用加速度计和陀螺仪来测量物体运动状态的导航系统。通过积分加速度和角速度,INS能够实时计算位置、速度和姿态。然而,INS在长时间运行中会受到累积误差的影响,导致定位精度下降。
融合定位的必要性
结合天文导航与INS的优点,可以在以下方面实现更高的定位精度:
-
互补性:天文导航在长时间内可能受到天气和可视天体数量的限制,而INS则可以提供高频率的实时数据。两者结合可以在INS失效时使用天文导航进行修正。
-
误差校正:天文导航可以为INS提供绝对位置参考,减少INS的累积误差。
-
提高可靠性:在某些环境中,单一的导航系统可能受到信号干扰或遮挡,融合定位可以提高系统的鲁棒性。
MATLAB例程
以下是一个简单的MATLAB例程,展示如何实现天文导航与INS的融合定位。
1. 初始化参数
% 时间参数
dt = 0.1; % 时间步长
T = 10; % 总时间
time = 0:dt:T; % 时间向量
% INS初始状态
ins_position = [0; 0; 0]; % 初始位置
ins_velocity = [1; 0; 0]; % 初始速度
acceleration = [0; 0; 0]; % 加速度
% 天文导航初始位置
star_position = [5; 5; 0]; % 目标天文位置
2. INS运动模型
% 运动模型
ins_positions = zeros(3, length(time)); % 存储INS位置
for i = 1:length(time)
ins_position = ins_position + ins_velocity * dt + 0.5 * acceleration * dt^2;
ins_positions(:, i) = ins_position; % 更新位置
end
3. 天文导航修正
% 天文导航修正
nav_positions = zeros(3, length(time)); % 存储导航位置
for i = 1:length(time)
% 这里使用简单的距离修正
nav_positions(:, i) = star_position; % 假设天文导航提供固定位置
end
4. 融合定位
% 融合定位
fused_positions = zeros(3, length(time));
for i = 1:length(time)
% 使用简单的加权平均进行融合
fused_positions(:, i) = (ins_positions(:, i) + nav_positions(:, i)) / 2;
end
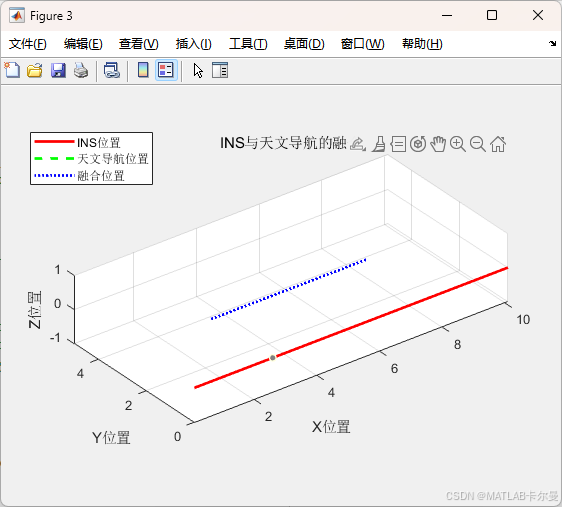
5. 结果可视化
% 绘制结果
figure;
plot3(ins_positions(1, :), ins_positions(2, :), ins_positions(3, :), 'r', 'DisplayName', 'INS Position');
hold on;
plot3(nav_positions(1, :), nav_positions(2, :), nav_positions(3, :), 'g', 'DisplayName', 'Astronomical Navigation Position');
plot3(fused_positions(1, :), fused_positions(2, :), fused_positions(3, :), 'b', 'DisplayName', 'Fused Position');
xlabel('X Position');
ylabel('Y Position');
zlabel('Z Position');
title('Fusion of INS and Astronomical Navigation');
legend;
grid on;
运行结果
完整代码的下载地址:https://download.youkuaiyun.com/download/callmeup/90245853
结论
将天文导航与惯性导航系统相结合的融合定位方法,能够有效提高导航精度和可靠性。通过MATLAB的简单实现示例,我们展示了如何利用这两种技术的优势来优化定位系统。未来,随着技术的进一步发展,这种融合定位方法将在无人驾驶、航天探索和其他领域发挥更大的作用。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 887
887

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











