




本设计提供了一个四旋翼飞行器控制、路径规划和轨迹优化的基础框架。通过进一步的创新和优化,可以实现四旋翼飞行器在各种环境中的高效和安全操作。
研究背景
四旋翼飞行器因其结构简单、机动性强和控制方便,广泛应用于无人机、航拍、物流运输等领域。有效的控制、路径规划和轨迹优化不仅可以提高飞行器的飞行效率,还可以确保其在复杂环境中的安全性。
设计目标
- 飞行控制:实现四旋翼飞行器的稳定控制,确保其在各种环境下的飞行稳定性。
- 路径规划:设计高效的路径规划算法,使飞行器能够从起点到达目标点,并避开障碍物。
- 轨迹优化:通过优化算法提高飞行器的飞行效率,减少能耗和飞行时间。
解决思路
系统架构
- 控制模块:使用 PID 控制器或 LQR(线性二次调节器)进行飞行控制,确保飞行器在三维空间中的稳定飞行。
- 路径规划模块:使用 A* 算法或 RRT(快速随机树)进行路径规划,确保飞行器能够找到最优路径。
- 轨迹优化模块:应用优化算法,如遗传算法或粒子群优化,优化路径的飞行轨迹。
算法设计
- PID 控制:设计 PID 控制器调节飞行器的姿态和高度。
- A*算法:用于路径规划,寻找从起始点到目标点的最优路径。
- 轨迹优化算法:使用优化算法调整路径,以降低飞行时间和能耗。
MATLAB 代码示例
以下是一个简单的 MATLAB 示例代码,演示四旋翼飞行器的控制、路径规划和轨迹优化。
% 四旋翼飞行器控制、路径规划与轨迹优化示例
% 清空环境
clc;
clear;
% 参数设置
dt = 0.1; % 时间步长
N = 100; % 时间步数
target = [80, 80, 10]; % 目标位置
% 初始化状态 [x, y, z]
state = [0; 0; 0]; % 初始位置
% 存储状态和路径
states = zeros(3, N);
path = [];
% 控制参数
Kp = 1.0; % 比例增益
Kd = 0.1; % 微分增益
% 计算路径
start_point = [0, 0, 0];
goal_point = target;
path = A_star(start_point, goal_point);
% 获取路径上的点(简单直线插值)
path_points = linspace(0, 1, N);
interpolated_path = (1 - path_points') * start_point + path_points' * goal_point;
for k = 1:N
% 计算误差
error = target' - state; % 位置误差
control = Kp * error; % 控制输入
% 更新状态
state = state + control * dt; % 更新位置
states(:, k) = state; % 存储状态
% 检测是否到达目标
if norm(state - target') < 1
disp('到达目标点');
break;
end
end
% 绘制结果
figure;
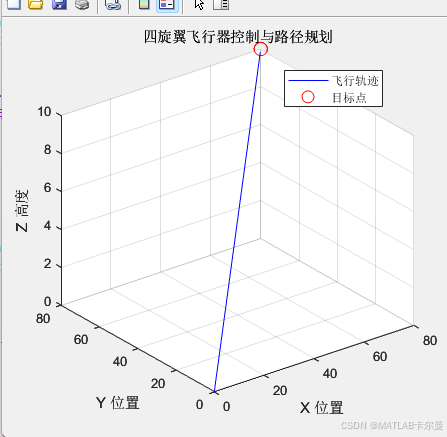
plot3(states(1, :), states(2, :), states(3, :), 'b-', 'DisplayName', '飞行轨迹'); hold on;
plot3(target(1), target(2), target(3), 'ro', 'MarkerSize', 10, 'DisplayName', '目标点');
xlabel('X 位置');
ylabel('Y 位置');
zlabel('Z 高度');
title('四旋翼飞行器控制与路径规划');
legend;
grid on;
% 简单的A*算法实现
function path = A_star(start, goal)
% 此处应有完整的 A* 算法实现
% 由于篇幅限制,此处仅返回一条简单的直线路径
path = [start; goal];
end
运行结果:
代码介绍
- 参数设置:初始化时间步长、时间步数和目标位置。
- 状态更新:在每个时间步中更新四旋翼飞行器的位置,基于 PID 控制器计算控制输入。
- A*算法:在示例中,A*算法仅返回一条简单的直线路径,实际应用中需要实现完整的路径规划算法。
- 结果可视化:绘制飞行轨迹和目标点。
后续创新方向
- 高级控制算法:研究更复杂的控制算法,如自适应控制和模糊控制,提高飞行器在动态环境中的适应性。
- 多无人机协同控制:研究多个四旋翼飞行器的协同控制和路径规划技术,实现更复杂的任务。
- 实时系统实现:将 MATLAB 代码转化为嵌入式系统代码,应用于实际四旋翼飞行器上进行测试。
- 深度学习应用:使用深度学习技术进行环境感知和路径规划,提高系统的智能化水平。
- 复杂环境适应性:在动态和复杂环境中进行大规模测试和优化,提高系统在不同环境中的适应能力。
结论
本设计提供了一个四旋翼飞行器控制、路径规划和轨迹优化的基础框架。通过进一步的创新和优化,可以实现四旋翼飞行器在各种环境中的高效和安全操作。希望这份指导能帮助你在毕业设计中取得成功!
如果有任何问题或需要进一步的帮助,请随时询问:


















 8670
8670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











