







前言:ISP 技术在嵌入式视觉领域的重要性
在当今嵌入式视觉应用中,无论是智能监控摄像头、车载影像系统还是工业检测设备,图像信号处理器(ISP)都扮演着至关重要的角色。作为连接图像传感器与最终显示设备的核心桥梁,ISP 的性能直接决定了视觉系统的成像质量。笔者近期在基于瑞芯微 RK1106 芯片的智能摄像头项目开发过程中,深刻体会到 ISP 参数调优对图像质量的显著影响 —— 同样的硬件配置下,经过专业 ISP 调试的设备能在低光环境下保持画面洁净度,在复杂光源场景中准确还原物体色彩,而未经优化的系统则会出现画面偏色、噪点严重、暗角明显等问题。
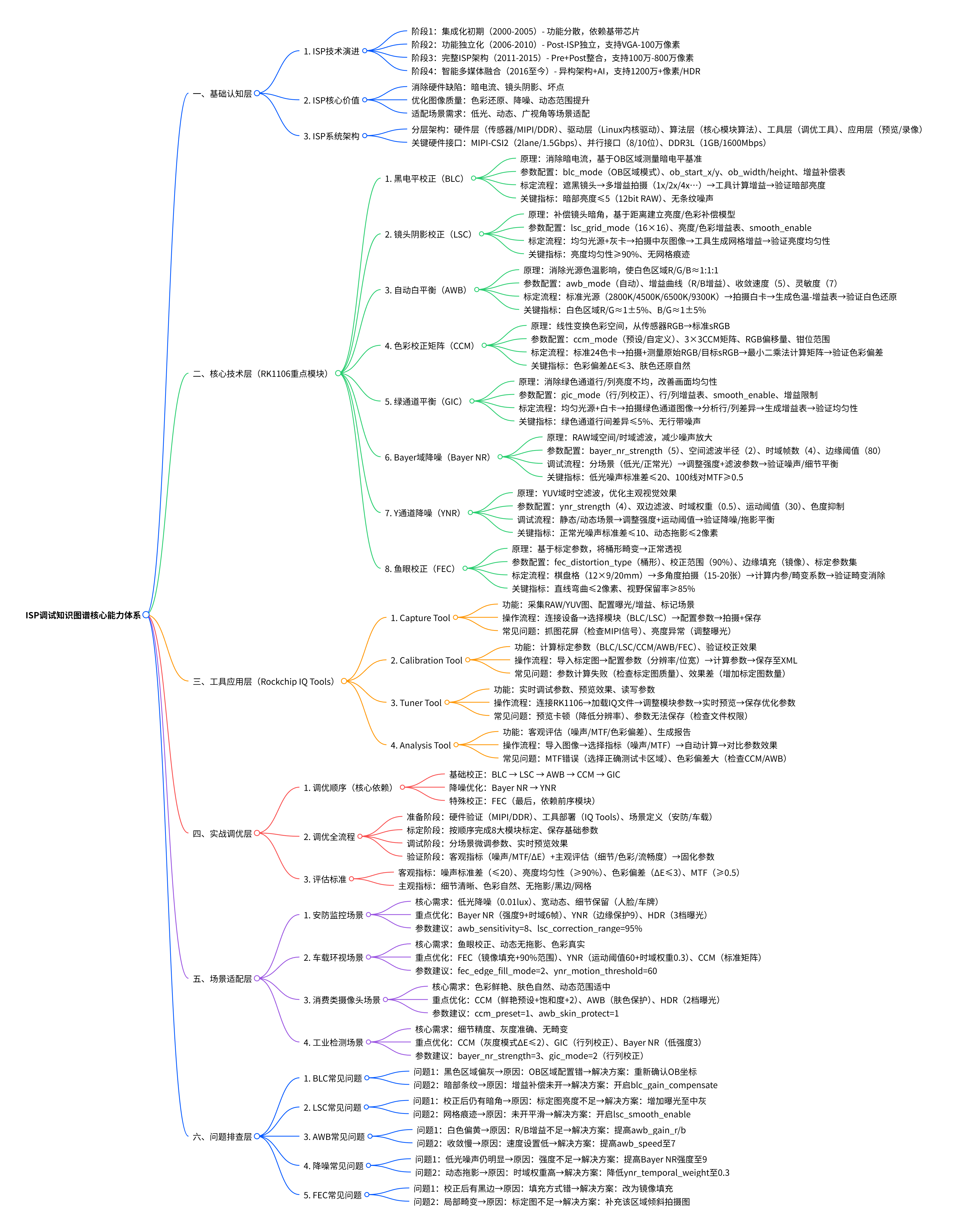
本文将以 "技术演进 + 实战落地" 为双主线,系统梳理 ISP 技术的发展历程,详细解析 ISP 设计开发的完整流程,并基于瑞芯微官方 IQ 工具文档(Rockchip IQ Tools),对 RK1106 平台常用的 BLC、LSC、CCM、AWB 等核心图像处理模块进行深度剖析,提供包含参数配置表、调试流程图和故障排查方案在内的实战指南。全文采用表格化呈现关键技术点,力求兼顾专业性与可读性,为嵌入式视觉工程师提供一份全面的 ISP 技术参考资料。
第一章 ISP 技术发展历史全景解析
1.1 ISP 技术四阶段演进历程
图像信号处理技术的发展始终与图像传感器分辨率提升、应用场景拓展和计算能力增强保持同步。根据行业资料梳理,ISP 技术的发展可明确划分为四个关键阶段,每个阶段都呈现出独特的技术特征和应用形态。
|
发展阶段 |
时间跨度 |
核心特征 |
典型分辨率 |
硬件架构 |
代表应用 |
技术瓶颈 |
|
第一阶段:集成化初期 |
2000-2005 年 |
Pre-ISP 与传感器集成,Post-ISP 依赖基带芯片 |
CIF(352×288) |
无独立 ISP 芯片,功能分散 |
早期功能手机、简易监控 |
像素低,无独立图像处理能力,色彩还原差 |
|
第二阶段:功能独立化 |
2006-2010 年 |
Post-ISP 独立为单一芯片,Pre-ISP 存在两种集成方案 |
VGA (640×480) 至 100 万像素 |
独立 Post-ISP 芯片,JPEG 压缩功能分离 |
智能手机、便携式数码相机 |
高像素场景下处理能力不足,功耗控制差 |
|
第三阶段:完整 ISP 架构 |
2011-2015 年 |
Pre-ISP 与 Post-ISP 整合为完整 ISP,集成显示控制 |
100 万至 800 万像素 |
全功能 ISP 芯片,集成显示控制器 |
中高端智能手机、安防摄像头 |
多场景自适应能力弱,降噪与细节保留平衡难 |
|
第四阶段:智能多媒体融合 |
2016 年至今 |
集成 AI 加速单元,支持多帧降噪、HDR 合成,引入 MMP 架构 |
1200 万像素以上 |
异构计算架构,ISP+CPU+GPU+NPU 融合 |
旗舰手机、4K 监控、车载影像、AR/VR |
复杂光源下色彩一致性控制,实时性与画质平衡 |
表 1-1:ISP 技术四阶段演进对比表
1.1.1 第一阶段:集成化初期(2000-2005)
这一阶段的 ISP 功能呈现明显的分散化特征。由于当时图像传感器的分辨率普遍停留在 CIF 级别(352×288 像素),图像处理需求相对简单,Pre-ISP(前端图像处理)功能直接集成在图像传感器内部,主要完成基本的黑电平校正和坏点修复;而 Post-ISP(后端图像处理)功能则依赖手机基带芯片的剩余计算资源,仅能实现简单的白平衡调整和 JPEG 压缩。
典型代表产品如诺基亚 3650 手机,其配备的 VGA 分辨率摄像头采用 CMOS 传感器,ISP 功能完全依赖 TI OMAP1510 基带芯片,成像质量受限于基带芯片的处理能力,在光线不足环境下画面噪点明显,色彩还原能力较差。这一阶段的技术瓶颈主要在于缺乏专用的图像处理硬件,无法满足高画质需求。
1.1.2 第二阶段:功能独立化(2006-2010)
随着图像传感器分辨率提升至 VGA(640×480)乃至 100 万像素级别,基带芯片已难以承担日益复杂的图像处理任务。行业开始将 Post-ISP 功能从基带芯片中分离,形成独立的 ISP 芯片,专门负责 JPEG 压缩、色彩校正和数据流协调处理。
这一阶段出现了两种 Pre-ISP 集成方案:部分厂商选择将 Pre-ISP 继续集成在传感器内部(如索尼 IMX036 传感器),另一部分则将其与 Post-ISP 整合(如德州仪器 OMAP3430 中的 ISP 模块)。代表产品包括苹果 iPhone 3G,其采用独立 ISP 芯片实现了当时领先的自动白平衡和曝光控制,但在高像素场景下仍存在处理延迟问题。
1.1.3 第三阶段:完整 ISP 架构(2011-2015)
当图像传感器进入百万像素时代(100 万至 800 万像素),Pre-ISP 所需的存储资源和计算能力大幅增加,传感器端已无法单独承载,行业开始将 Pre-ISP 与 Post-ISP 整合为完整的独立 ISP 芯片,并集成显示器控制功能,进一步减轻基带芯片负担。
这一阶段的 ISP 实现了真正意义上的全流程图像处理,包含黑电平校正、镜头阴影校正、白平衡、色彩校正、降噪等完整功能链。瑞芯微在这一时期推出了首款独立 ISP 芯片 RK1108,支持 500 万像素传感器,集成了先进的 2D 降噪算法,广泛应用于安防监控领域。但受限于硬件性能,这一阶段的 ISP 在多场景自适应处理和动态范围方面仍有不足。
1.1.4 第四阶段:智能多媒体融合(2016 至今)
随着移动互联网和人工智能技术的快速发展,ISP 技术进入智能融合阶段。这一阶段的 ISP 不再是单纯的图像处理单元,而是与 CPU、GPU、NPU 等形成异构计算架构,集成多帧降噪(MFNR)、高动态范围(HDR)合成、AI 场景识别等智能功能,形成了 Mobile Multimedia Processor(MMP)架构。
瑞芯微在该阶段推出的 RK1106 芯片代表了嵌入式领域 ISP 的先进水平,其 ISP 模块支持 1200 万像素传感器,集成了基于 AI 的智能场景适配算法,能根据环境光线自动调整降噪强度和色彩参数,同时支持鱼眼校正(FEC)等特殊处理功能。这一阶段的技术挑战主要在于如何在保证实时性的同时,进一步提升复杂光源下的色彩一致性和动态范围。
1.2 ISP 核心技术演进路线图
除了整体架构的演进,ISP 各核心技术模块也经历了持续的优化升级。通过梳理关键技术的发展脉络,可以更清晰地理解 ISP 性能提升的内在逻辑。
|
技术模块 |
2000-2005 年 |
2006-2010 年 |
2011-2015 年 |
2016 至今 |
瑞芯微 RK1106 实现 |
|
降噪技术 |
无专门降噪,仅靠简单平滑 |
基础 2D 空间降噪 |
结合时空域的 3D 降噪 |
多帧降噪 (MFNR)+AI 降噪 |
支持 Bayer NR/YNR/MFNR 三级降噪,可配置降噪强度 |
|
白平衡 |
固定色温预设 |
基础自动白平衡 (AWB) |
动态 AWB,多光源检测 |
AI 辅助 AWB,场景自适应 |
支持手动 / 自动模式,可配置色温范围和收敛速度 |
|
色彩处理 |
简单 RGB 增益调整 |
基础色彩校正矩阵 (CCM) |
增强型 CCM,肤色保护 |
场景化 CCM,AI 色彩优化 |
12×12 CCM 矩阵,支持自定义色彩风格 |
|
动态范围 |
固定曝光,动态范围窄 |
基础自动曝光 (AE) |
多曝光 HDR 合成 |
实时 HDR,AI 场景适配 |
支持 3 帧 HDR 合成,可配置曝光步长和合成权重 |
|
镜头校正 |
无镜头校正 |
简单暗角修复 |
基于标定的 LSC |
动态 LSC,畸变校正 |
支持 8×8/16×16 网格 LSC,鱼眼校正 (FEC) |
表 1-2:ISP 核心技术模块演进对比表
1.3 瑞芯微 ISP 技术发展历程
作为国内领先的嵌入式处理器厂商,瑞芯微在 ISP 技术领域有着深厚的积累,其产品演进与行业发展趋势高度契合,同时形成了独特的技术特色。
|
产品型号 |
发布时间 |
ISP 核心参数 |
关键技术特点 |
典型应用 |
|
RK1108 |
2014 年 |
支持 500 万像素,最大帧率 30fps |
首次集成完整 ISP 功能链,2D 降噪 |
安防监控、行车记录仪 |
|
RK3288 |
2015 年 |
支持 800 万像素,HDR 合成 |
引入多曝光 HDR,增强型 LSC |
中高端平板、智能电视 |
|
RK1126 |
2019 年 |
支持 1200 万像素,MFNR |
多帧降噪,AI 场景识别 |
高清监控、人脸识别 |
|
RK1106 |
2021 年 |
支持 1200 万像素,4K@30fps |
优化的 AI ISP,FEC 鱼眼校正 |
智能摄像头、车载 DVR |
表 1-3:瑞芯微主要芯片 ISP 功能对比
瑞芯微 ISP 技术的发展呈现出三个明显特点:一是持续提升硬件处理能力,从早期的 500 万像素支持到当前的 1200 万像素 + 4K 分辨率;二是不断丰富智能处理算法,特别是在 AI 辅助 ISP 方面形成优势;三是针对特定应用场景优化,如为安防监控优化低光降噪,为车载应用增加畸变校正。
第二章 ISP 设计开发完整流程
2.1 ISP 系统设计总体框架
一个完整的 ISP 系统设计涉及硬件架构、算法实现、驱动开发和应用调试多个层面,需要不同专业背景的工程师协同工作。瑞芯微基于其 RK 系列芯片提供了一套完整的 ISP 开发解决方案,涵盖从硬件设计到参数调优的全流程支持。
2.1.1 ISP 系统分层架构
ISP 系统通常采用分层设计架构,各层之间通过标准化接口通信,确保系统的可扩展性和可维护性。
|
架构层次 |
主要功能 |
瑞芯微解决方案 |
开发工具 |
交付物 |
|
硬件层 |
图像传感器接口、ISP 处理单元、存储控制器 |
RK1106 芯片,支持 MIPI/CSI-2 接口 |
硬件设计指南、原理图模板 |
硬件设计文件、PCB 版图 |
|
驱动层 |
传感器驱动、ISP 硬件驱动、DMA 驱动 |
Linux 内核驱动,Rockchip ISP 驱动框架 |
Kernel 开发套件、驱动调试工具 |
驱动代码、设备树配置 |
|
算法层 |
黑电平校正、白平衡、色彩校正、降噪等核心算法 |
瑞芯微 ISP 算法库,支持参数配置 |
RKISP SDK |
算法库、配置接口 |
|
工具层 |
图像采集、参数调优、效果评估 |
Rockchip IQ Tools v2.0.8 |
抓图工具、Tuner 工具、分析工具 |
调优参数文件、测试报告 |
|
应用层 |
图像预览、录像、抓拍等应用功能 |
应用开发 API,支持多种图像格式 |
应用开发套件 |
应用程序、用户手册 |
表 2-1:ISP 系统分层架构表
2.1.2 关键硬件接口设计
ISP 系统的硬件设计重点在于图像传感器接口、存储接口和数据传输路径的设计,这些直接影响 ISP 的处理性能和图像质量。
|
接口类型 |
关键参数 |
瑞芯微 RK1106 支持 |
设计注意事项 |
常见问题 |
|
MIPI-CSI2 |
通道数:1-4 lane速率:1.5Gbps/lane数据格式:RAW10/RAW12 |
支持 2 lane MIPI-CSI2最高速率 1.5Gbps/lane支持 RAW10/RAW12 输入 |
阻抗匹配 (50Ω)差分对等长设计屏蔽处理 |
信号完整性问题导致图像花屏速率不匹配导致帧率下降 |
|
并行接口 |
数据宽度:8/10/12 位同步信号:HSYNC/VSYNC像素时钟:最高 100MHz |
支持 8/10 位并行接口像素时钟最高 80MHz |
时钟信号完整性同步信号时序匹配 |
时序偏差导致图像错位噪声干扰导致画面杂点 |
|
DDR 接口 |
类型:DDR3/DDR3L速率:最高 1600Mbps容量:最小 256MB |
支持 DDR3L-1600最大支持 1GB 容量 |
布局布线优化电源噪声控制 |
带宽不足导致帧丢失时序不达标导致系统不稳定 |
|
控制接口 |
I2C:传感器配置SPI:固件升级UART:调试 |
2 路 I2C 用于传感器控制1 路 SPI 用于固件升级多 UART 接口 |
I2C 时序分析SPI 通信测试 |
I2C 通信失败导致传感器无法配置SPI 传输错误导致固件升级失败 |
表 2-2:ISP 关键硬件接口设计参数表
2.2 ISP 开发详细流程
基于瑞芯微 RK1106 平台的 ISP 开发遵循标准化流程,从需求分析到最终产品交付,通常包含八个主要阶段。
2.2.1 开发阶段划分与任务分配
|
开发阶段 |
时间占比 |
核心任务 |
负责角色 |
瑞芯微支持资源 |
输出物 |
|
需求分析 |
10% |
明确图像质量要求、分辨率、帧率、功耗等指标 |
产品经理、系统工程师 |
需求分析模板、行业参考指标 |
需求规格说明书 |
|
硬件设计 |
20% |
传感器选型、原理图设计、PCB 布局 |
硬件工程师 |
硬件设计指南、参考设计 |
原理图、PCB 文件、BOM 表 |
|
驱动开发 |
15% |
传感器驱动、ISP 驱动、设备树配置 |
驱动工程师 |
驱动开发文档、SDK |
驱动代码、驱动测试报告 |
|
系统集成 |
15% |
硬件调试、驱动移植、系统联调 |
系统工程师、硬件工程师 |
调试工具、技术支持 |
可运行的系统镜像 |
|
ISP 调优 |
25% |
基础模块标定、参数调试、效果优化 |
图像算法工程师 |
Rockchip IQ Tools、调优指南 |
调优参数文件、效果报告 |
|
功能测试 |
10% |
功能验证、性能测试、兼容性测试 |
测试工程师 |
测试用例、测试工具 |
测试报告、问题清单 |
|
产品化 |
3% |
固件固化、生产工具开发、批量测试 |
生产工程师 |
量产工具、生产指南 |
量产固件、生产文档 |
|
维护迭代 |
2% |
问题修复、功能升级 |
全团队协作 |
技术支持、升级工具 |
升级固件、维护记录 |
表 2-3:ISP 开发阶段划分表
2.2.2 关键开发阶段详解
阶段 1:需求分析(以智能摄像头为例)
需求分析阶段需要明确具体的应用场景和技术指标,为后续开发提供依据。智能摄像头的 ISP 需求通常包括:
- 分辨率:1080P (1920×1080)@30fps
- 动态范围:支持 HDR,动态范围≥120dB
- 低光性能:0.01lux 环境下可清晰成像
- 色彩还原:色温 3000K-7000K 范围内色彩偏差≤5%
- 特殊功能:支持鱼眼校正、移动侦测
- 功耗:正常工作模式下≤1.5W
瑞芯微提供了行业需求分析模板,包含常见应用场景的参考指标,帮助开发团队快速明确需求边界。
阶段 2:硬件设计关键要点
硬件设计阶段需要重点关注以下几个方面:
- 传感器选型:根据需求选择合适的图像传感器,如低光场景可选择索尼 IMX307,成本敏感场景可选择格科微 GC2053。RK1106 支持主流的 MIPI 和并行接口传感器。
- 电源设计:ISP 和传感器对电源噪声敏感,需要采用多级滤波设计,模拟电源和数字电源分开供电,关键电源节点添加磁珠和电容滤波。
- 信号完整性:MIPI-CSI2 信号采用差分传输,需要严格控制阻抗匹配和信号等长,建议使用阻抗控制板和差分对布线规则。
- 散热设计:RK1106 在满负荷工作时会产生一定热量,需要合理设计 PCB 散热路径,必要时添加散热片。
瑞芯微提供了完整的硬件设计指南和参考设计,包含详细的原理图和 PCB 布局建议,可大幅缩短硬件设计周期。
阶段 3:驱动开发核心步骤
RK1106 平台的 ISP 驱动开发基于 Linux 内核,主要步骤包括:
- 设备树配置:在设备树中定义传感器节点、ISP 节点和相关引脚配置,指定传感器型号、接口类型、时钟参数等。
&i2c1 {
status = "okay";
gc2053: gc2053@37 {
compatible = "galaxycore,gc2053";
reg = <0x37>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
reset-gpios = <&gpio0 RK_PA3 GPIO_ACTIVE_LOW>;
pwdn-gpios = <&gpio0 RK_PA4 GPIO_ACTIVE_HIGH>;
csi_id = <0>;
csi_ch = <0>;
lane_num = <2>;
max_hblank = <200>;
max_vblank = <20>;
galaxycore,max-fps = <30>;
galaxycore,min-fps = <1>;
};
};
&csi {
status = "okay";
ports {
port@0 {
reg = <0>;
csi_in: endpoint {
remote-endpoint = <&gc2053_out>;
data-lanes = <1 2>;
};
};
};
};
传感器驱动开发:实现传感器的初始化、分辨率配置、曝光控制、增益调整等功能,提供标准的 V4L2 接口。
ISP 驱动移植:基于瑞芯微提供的 ISP 驱动框架,实现 ISP 硬件初始化、参数配置、中断处理等功能。
驱动调试:使用 V4L2 工具测试摄像头功能,通过调试工具查看传感器和 ISP 的工作状态,解决驱动兼容性问题。
瑞芯微提供了完整的驱动开发包和调试工具,包括 v4l2-ctl、rkisp-debug 等,方便开发人员进行驱动调试。
阶段 4:ISP 调优详细流程
ISP 调优是决定图像质量的关键环节,瑞芯微提供的 Rockchip IQ Tools v2.0.8 工具套件支持完整的调优流程,分为基础模块标定和效果调试两个主要部分。
|
调优阶段 |
核心任务 |
工具支持 |
操作步骤 |
输出结果 |
|
基础模块标定 |
黑电平校正 (BLC)、镜头阴影校正 (LSC)、白平衡校准 (AWB) |
Calibration Tool |
1. 拍摄标定图像2. 导入工具计算参数3. 验证参数有效性4. 保存参数 |
BLC 参数、LSC 网格数据、AWB 校准系数 |
|
效果调试 |
色彩调整 (CCM)、降噪参数 (Bayer NR/YNR)、动态范围优化 |
Tuner Tool |
1. 配置调试参数2. 实时预览效果3. 对比分析图像4. 优化参数 |
CCM 矩阵、降噪参数、HDR 配置 |
|
效果验证 |
客观指标测试、主观效果评估 |
Analysis Tool |
1. 采集测试图像2. 分析图像指标3. 生成测试报告 |
图像质量报告、参数优化建议 |
表 2-4:ISP 调优阶段划分表
瑞芯微强调调优的顺序性,由于部分模块的标定依赖前级模块的结果,必须按照特定顺序进行:BLC → LSC → AWB → CCM → GIC → Bayer NR → YNR → FEC。这种顺序确保了每个模块都能基于正确的前级处理结果进行优化,避免错误累积。
第三章 RK1106 ISP 核心模块详解
3.1 黑电平校正(BLC)
3.1.1 BLC 技术原理与作用
黑电平校正(Black Level Correction)是 ISP 最基础的图像处理模块之一,其主要作用是消除图像传感器在无光照条件下输出的暗电流信号,确保黑色区域能够正确呈现为纯黑,为后续图像处理提供准确的基准。
图像传感器即使在完全遮光的情况下,由于半导体材料的热噪声等因素,也会产生一定的输出信号,这部分信号被称为暗电流。如果不进行校正,会导致图像的黑色区域呈现灰色,影响整体图像质量和后续的白平衡、色彩校正等处理精度。
BLC 的基本原理是:在传感器的光学黑区域(Optical Black,OB 区域,即传感器上不接收光线的像素区域)采集暗电流信号,计算出每个像素的暗电流平均值,然后从所有有效像素的输出信号中减去这个平均值,从而消除暗电流的影响。
3.1.2 RK1106 BLC 实现方式
瑞芯微 RK1106 的 BLC 模块支持多种校正模式,可根据不同传感器特性和应用场景灵活配置。
|
BLC 参数 |
功能描述 |
取值范围 |
推荐值 |
调整建议 |
|
blc_mode |
校正模式选择 |
0: 关闭 1: 全局模式 2: 分区模式 3:OB 区域模式 |
3(OB 区域模式) |
优先使用 OB 区域模式,精度最高 |
|
blc_global_value |
全局校正值 |
0-4095(12 位传感器) |
根据实际测量值调整 |
仅在全局模式下有效,需多次测量取平均值 |
|
blc_ob_start_x |
OB 区域起始 X 坐标 |
0 - 传感器宽度 |
0 |
根据传感器 datasheet 配置 |
|
blc_ob_start_y |
OB 区域起始 Y 坐标 |
0 - 传感器高度 |
0 |
根据传感器 datasheet 配置 |
|
blc_ob_width |
OB 区域宽度 |
0 - 传感器宽度 |
32 |
建议设置为 32-64 像素 |
|
blc_ob_height |
OB 区域高度 |
0 - 传感器高度 |
32 |
建议设置为 32-64 像素 |
|
blc_gain_compensate |
增益补偿开关 |
0: 关闭 1: 开启 |
1 |
开启后可补偿不同增益下的暗电流变化 |
|
blc_gain_table |
增益补偿表 |
0-4095,最多 16 个增益点 |
实测值 |
需在不同增益下测量暗电流,建立补偿表 |
表 3-1:RK1106 BLC 参数配置表
3.1.3 BLC 标定详细流程
基于 Rockchip IQ Tools v2.0.8 的 BLC 标定流程分为拍摄标定图像、计算校正参数和验证效果三个步骤,每个步骤都有严格的操作规范。
步骤 1:拍摄 BLC 标定图像
- 准备工作:
- 将 RK1106 开发板与调试电脑连接,确保 Rockchip IQ Tools 能正常通信
- 用镜头盖或黑布完全遮挡摄像头镜头,确保无任何光线进入
- 打开 Capture Tool,选择正确的传感器型号和分辨率
参数配置:
- 光源选择:Unknown(无光环境)
- 模块选择:BLC
- 曝光时间:固定为 10ms(曝光时间不影响 BLC 标定)
- 增益设置:需要遍历 1x、2x、4x、8x、16x、32x 等关键增益点
- 拍摄张数:每个增益点拍摄 1 张 raw 图
图像采集:
- 点击 "Start Manual Capture" 按钮开始拍摄
- 确认每张 raw 图的直方图都集中在低亮度区域,无明显亮点
- 拍摄完成后,将 raw 图保存到指定目录,命名格式为 "blc_gain_x.raw"(x 为增益值)
步骤 2:计算 BLC 校正参数
打开 Calibration Tool:
- 在 Rockchip IQ Tools 中启动 Calibration Tool
- 点击 "Edit Options" 配置 raw 图参数(分辨率、位宽、Bayer 顺序)
- 选择 "BLC" 标签页,点击 "Load Raw Files" 导入所有拍摄的 raw 图
参数计算:
- 工具自动识别 OB 区域并计算每个增益点的暗电流平均值
- 生成 blc_gain_table,包含不同增益下的校正值
- 可手动调整个别异常值,确保校正曲线平滑
参数保存:
- 点击 "Calibrate" 按钮完成计算
- 点击 "Save Parameters" 将 BLC 参数保存到工程的 XML 文件中
- 记录关键参数,如 OB 区域坐标、各增益点校正值
步骤 3:验证 BLC 效果
效果验证方法:
- 在完全遮光条件下拍摄一张 raw 图
- 分别在开启和关闭 BLC 的情况下查看图像效果
- 对比两种情况下的黑色区域亮度值,理想情况下开启 BLC 后黑色区域亮度应接近 0
常见问题排查:
|
问题现象 |
可能原因 |
解决方案 |
|
黑色区域仍有明显亮度 |
OB 区域配置错误 |
重新确认传感器 OB 区域坐标,调整 blc_ob_start_x/y 和尺寸参数 |
|
图像出现条纹状噪声 |
增益补偿未开启 |
开启 blc_gain_compensate,重新标定增益补偿表 |
|
不同增益下暗电流差异大 |
增益补偿表不准确 |
增加增益标定点数,确保覆盖所有常用增益范围 |
|
图像边缘出现暗角 |
BLC 与 LSC 未协同 |
先完成 BLC 标定,再进行 LSC 标定 |
表 3-2:BLC 常见问题排查表
3.2 镜头阴影校正(LSC)
3.2.1 LSC 技术原理与作用
镜头阴影校正(Lens Shading Correction)用于消除由于镜头光学特性导致的图像亮度和色彩不均匀现象,主要表现为图像中心区域亮度高、边缘区域亮度低的 "暗角" 效应,以及不同区域的色彩偏差。
镜头阴影产生的主要原因包括:
- 镜头光学结构导致边缘区域进光量减少
- 镜头镀膜不均匀导致的色彩衰减差异
- 传感器与镜头中心对齐偏差
- 光学系统的渐晕效应(Vignetting)
LSC 的校正原理是通过预先测量镜头在不同位置的亮度衰减特性,建立校正矩阵,然后对图像的每个像素根据其位置应用相应的增益补偿,使整个图像的亮度和色彩达到均匀一致。
3.2.2 RK1106 LSC 实现方式
瑞芯微 RK1106 的 LSC 模块支持亮度和色彩的同时校正,采用网格状的校正方式,可灵活配置校正精度和范围。
|
LSC 参数 |
功能描述 |
取值范围 |
推荐值 |
调整建议 |
|
lsc_enable |
LSC 功能开关 |
0: 关闭 1: 开启 |
1 |
正常使用时开启 |
|
lsc_grid_mode |
网格模式选择 |
0:8×8 1:16×16 2:32×32 |
1(16×16) |
平衡精度和计算量,16×16 适用于大多数场景 |
|
lsc_brightness_gain |
亮度校正增益表 |
0-4095,每个网格点一个值 |
实测值 |
根据镜头暗角特性调整,边缘区域增益高于中心 |
|
lsc_color_gain_r |
红色通道色彩增益表 |
0-4095,每个网格点一个值 |
实测值 |
补偿红色通道的阴影差异 |
|
lsc_color_gain_b |
蓝色通道色彩增益表 |
0-4095,每个网格点一个值 |
实测值 |
补偿蓝色通道的阴影差异 |
|
lsc_smooth_enable |
平滑处理开关 |
0: 关闭 1: 开启 |
1 |
开启后可避免网格边界出现明显过渡 |
|
lsc_clip_limit |
增益限制值 |
1024-4095 |
3072 |
防止个别点增益过高导致噪声放大 |
|
lsc_update_mode |
参数更新模式 |
0: 立即更新 1: 帧同步更新 |
1 |
避免参数更新导致画面闪烁 |
表 3-3:RK1106 LSC 参数配置表
3.2.3 LSC 标定详细流程
LSC 标定需要使用标准的均匀光源和标定板,通过拍摄标准图像建立校正模型,是一个相对复杂的标定过程。
步骤 1:标定环境准备
硬件准备:
- RK1106 开发板及配套摄像头模组
- 标准均匀光源(亮度均匀性≥95%)
- 标准灰卡或白色标定板(反射率 90%)
- 三角架和调焦工具
环境要求:
- 暗室环境,避免环境光干扰
- 光源稳定工作 30 分钟以上,确保亮度稳定
- 摄像头与标定板距离合适,确保标定板充满整个画面
- 摄像头镜头调焦至清晰,避免虚焦影响标定精度
步骤 2:拍摄 LSC 标定图像
参数配置:
- 打开 Capture Tool,选择 "LSC" 模块
- 光源选择:标准均匀光源(如 D65)
- 曝光设置:调整曝光时间和增益,使标定板亮度达到中灰水平(建议 RAW 值在 1024-2048 之间)
- 拍摄张数:1 张(确保画面稳定无抖动)
图像采集:
- 调整摄像头角度,确保标定板与画面完全对齐,无倾斜
- 确认画面中无阴影和反光
- 拍摄 raw 图并保存,命名为 "lsc_calib.raw"
步骤 3:计算 LSC 校正参数
导入标定图像:
- 启动 Calibration Tool,选择 "LSC" 标签页
- 配置 raw 图参数(分辨率、位宽、Bayer 顺序)
- 点击 "Load Raw File" 导入拍摄的 LSC 标定图
网格设置:
- 选择网格模式(如 16×16)
- 调整网格覆盖范围,确保覆盖整个有效图像区域
- 设置增益限制值,避免过度补偿
参数计算:
- 工具自动分析图像各区域亮度和色彩差异
- 生成亮度增益表和色彩增益表
- 开启平滑处理,使增益过渡更加自然
参数保存:
- 点击 "Calibrate" 完成计算
- 预览校正效果,确认暗角是否明显改善
- 保存参数到 XML 文件,命名为 "lsc_param.xml"
步骤 4:验证 LSC 效果
效果验证方法:
- 拍摄均匀白色画面,分别开启和关闭 LSC 功能
- 对比两种情况下的图像亮度分布,使用 Analysis Tool 分析亮度均匀性
- 理想情况下,开启 LSC 后图像亮度均匀性应≥90%
常见问题排查:
|
问题现象 |
可能原因 |
解决方案 |
|
校正后仍有明显暗角 |
标定图像亮度不足 |
增加曝光时间,确保标定板亮度在合适范围 |
|
图像出现网格状痕迹 |
网格模式选择不当 |
增加网格密度(如从 8×8 改为 16×16),开启平滑处理 |
|
色彩出现局部偏差 |
色彩增益表不准确 |
重新拍摄标定图像,确保光源色彩均匀 |
|
边缘区域噪声明显 |
边缘增益过高 |
降低 lsc_clip_limit 值,限制最大增益 |
表 3-4:LSC 常见问题排查表
3.3 色彩校正矩阵(CCM)
3.3.1 CCM 技术原理与作用
色彩校正矩阵(Color Correction Matrix)是 ISP 中负责色彩精确还原的核心模块,其主要作用是将图像传感器输出的原始 RGB 色彩空间转换到标准色彩空间(如 sRGB),消除由于传感器光谱响应特性、光源特性和镜头色彩过滤导致的色彩偏差,确保图像色彩能够准确反映物体的真实颜色。
色彩偏差产生的主要原因包括:
- 不同传感器对同一波长光线的响应差异
- 光源光谱分布不同导致的色彩偏移(如白炽灯偏暖、荧光灯偏冷)
- 镜头对不同波长光线的透过率差异
- 传感器 RGB 通道的串扰
CCM 的校正原理基于线性代数中的矩阵变换,通过一个 3×3 或更高维度的矩阵,对每个像素的 RGB 值进行线性变换,公式如下:
[R_out] [C11 C12 C13] [R_in] [O1]
[G_out] = [C21 C22 C23] [G_in] + [O2]
[B_out] [C31 C32 C33] [B_in] [O3]
其中,C 矩阵为色彩校正矩阵,O 为偏移量,通过合理设计 C 矩阵和 O 偏移量,可以实现从传感器色彩空间到标准色彩空间的精确转换。
3.3.2 RK1106 CCM 实现方式
瑞芯微 RK1106 的 CCM 模块支持 12×12 的高精度色彩校正矩阵,同时提供预设矩阵和自定义矩阵两种模式,可满足不同场景的色彩需求。
|
CCM 参数 |
功能描述 |
取值范围 |
推荐值 |
调整建议 |
|
ccm_enable |
CCM 功能开关 |
0: 关闭 1: 开启 |
1 |
正常使用时开启 |
|
ccm_mode |
矩阵模式选择 |
0: 预设模式 1: 自定义模式 |
0(预设模式) |
初学者建议使用预设模式,专业调优可选择自定义 |
|
ccm_preset |
预设矩阵选择 |
0: 标准 1: 鲜艳 2: 自然 3: 冷色 4: 暖色 |
0(标准) |
根据应用场景选择,如监控场景选择标准模式 |
|
ccm_matrix |
自定义校正矩阵 |
0-65535,12×12 矩阵 |
标准 sRGB 矩阵 |
需要专业色彩分析仪测量,建立精确矩阵 |
|
ccm_offset_r |
红色通道偏移量 |
-2048-2047 |
0 |
微调红色通道整体亮度 |
|
ccm_offset_g |
绿色通道偏移量 |
-2048-2047 |
0 |
微调绿色通道整体亮度 |
|
ccm_offset_b |
蓝色通道偏移量 |
-2048-2047 |
0 |
微调蓝色通道整体亮度 |
|
ccm_clamp_enable |
钳位功能开关 |
0: 关闭 1: 开启 |
1 |
防止校正后像素值超出有效范围 |
|
ccm_clamp_min |
最小钳位值 |
0-1023 |
0 |
通常设置为 0 |
|
ccm_clamp_max |
最大钳位值 |
1024-4095 |
4095 |
通常设置为传感器最大输出值 |
表 3-5:RK1106 CCM 参数配置表
RK1106 提供的标准预设矩阵基于 sRGB 标准,适合大多数通用场景,其典型矩阵值如下:
CCM标准矩阵(sRGB):
1.0478707, -0.2041691, -0.0502062,
-0.0401123, 1.0412915, -0.0050573,
0.0041184, -0.0150436, 1.0135721
3.3.3 CCM 标定详细流程
CCM 标定需要使用标准色卡和专业色彩分析设备,通过测量色卡在标准光源下的色彩值,建立精确的色彩校正模型。
步骤 1:标定环境准备
硬件准备:
- RK1106 开发板及配套摄像头模组
- 标准 24 色卡(如 X-Rite ColorChecker)
- 标准光源箱(包含 D65、A、TL84 等标准光源)
- 专业色彩分析仪(如 Konica Minolta CA-410)
- 三角架和色卡固定装置
环境要求:
- 暗室环境,避免环境光干扰
- 光源箱预热 30 分钟,确保光源稳定
- 摄像头与色卡距离合适,确保色卡充满画面中心区域
- 摄像头与色卡保持平行,避免透视变形
步骤 2:拍摄 CCM 标定图像
- 参数配置:
- 打开 Capture Tool,选择 "CCM" 模块
- 光源选择:根据实际使用场景选择(如 D65)
- 曝光设置:调整曝光时间和增益,使色卡中灰色块的 RAW 值达到中灰水平(建议 1024-2048)
- 白平衡设置:使用已标定好的 AWB 参数,确保白平衡准确
- 图像采集:
- 调整摄像头角度,确保色卡完全对齐,无倾斜和变形
- 拍摄多张图像,选择最清晰、色彩最均匀的一张
- 保存 raw 图,命名为 "ccm_calib.raw"
步骤 3:测量色彩数据
色卡区域提取:
- 使用 Analysis Tool 打开标定图像
- 手动标记 24 色卡中每个色块的区域,确保每个区域包含足够的像素
- 计算每个色块的平均 RGB 值,记录为传感器原始色彩值(R_in, G_in, B_in)
标准色彩值获取:
- 查阅标准 24 色卡的出厂数据,获取每个色块在对应光源下的标准 CIE XYZ 值
- 将 CIE XYZ 值转换为 sRGB 值,作为目标色彩值(R_target, G_target, B_target)
数据整理:
- 建立原始色彩值与目标色彩值的对应表
- 去除异常值(如因噪声导致的明显偏差)
- 确保数据点覆盖整个色彩空间
步骤 4:计算 CCM 矩阵
矩阵计算:
- 启动 Calibration Tool,选择 "CCM" 标签页
- 导入原始色彩值和目标色彩值
- 工具使用最小二乘法计算最优 CCM 矩阵
矩阵优化:
- 验证计算出的矩阵校正效果,对比校正后的色彩值与目标值的偏差
- 微调矩阵系数,重点优化肤色、灰色等关键色彩的还原精度
- 设置偏移量,确保黑色和白色点的准确性
参数保存:
- 点击 "Calibrate" 完成矩阵计算
- 保存 CCM 矩阵和偏移量到 XML 文件
- 记录关键参数,如矩阵系数、偏移量、校正误差
步骤 5:验证 CCM 效果
效果验证方法:
- 拍摄包含多种颜色的测试场景,分别开启和关闭 CCM 功能
- 使用色彩分析仪测量关键颜色的还原精度
- 计算色彩偏差值(ΔE),理想情况下 ΔE 应小于 3
常见问题排查:
|
问题现象 |
可能原因 |
解决方案 |
|
整体色彩偏色 |
CCM 矩阵不准确 |
重新标定,确保标准色卡数据正确 |
|
肤色还原不自然 |
肤色区域校正不足 |
增加肤色样本点,专门优化肤色区域 |
|
白色区域有色彩 tint |
偏移量设置不当 |
调整 ccm_offset_r/b 参数,消除白色 tint |
|
色彩饱和度不足 |
矩阵增益过低 |
适当提高矩阵对角元素值,增强色彩饱和度 |
表 3-6:CCM 常见问题排查表
3.4 自动白平衡(AWB)
3.4.1 AWB 技术原理与作用
自动白平衡(Auto White Balance)是 ISP 中负责调整图像色温,确保白色物体在不同光源条件下都能呈现为纯白色的关键模块。其核心作用是消除光源色温对图像色彩的影响,使图像色彩还原不受环境光变化的干扰。
人眼具有自适应白平衡能力,能够在不同光源下准确识别白色物体,而图像传感器则会如实反映光源的色温特性:
- 在低色温光源(如白炽灯,2700K-3000K)下,图像会偏暖黄色
- 在高色温光源(如晴天,5500K-6500K)下,图像会偏冷蓝色
- 在荧光灯等特殊光源下,图像可能出现绿色或紫色偏差
AWB 的校正原理是通过分析图像中的白色参考点,计算出当前光源的色温,然后调整 RGB 三个通道的增益,使白色参考点的 RGB 值相等,从而实现白平衡校正。常见的 AWB 算法包括灰度世界法、白平衡灰度法、动态阈值法等。
3.4.2 RK1106 AWB 实现方式
瑞芯微 RK1106 的 AWB 模块采用先进的多区域检测算法,支持自动和手动两种模式,能够适应从 2000K 到 10000K 的宽色温范围,在复杂光源环境下也能保持稳定的白平衡效果。
|
AWB 参数 |
功能描述 |
取值范围 |
推荐值 |
调整建议 |
|
awb_enable |
AWB 功能开关 |
0: 关闭 1: 开启 |
1 |
正常使用时开启 |
|
awb_mode |
工作模式选择 |
0: 自动 1: 手动 2: 预设 |
0(自动) |
通用场景选择自动模式,固定光源场景可选择预设 |
|
awb_preset |
预设色温选择 |
0:2800K (白炽灯) 1:4500K (荧光灯) 2:6500K (日光) 3:9300K (阴天) |
2(6500K) |
根据实际光源选择 |
|
awb_manual_temp |
手动色温设置 |
2000-10000K |
6500K |
手动模式下使用,精确调整色温 |
|
awb_gain_r |
红色通道增益 |
0-4095 |
1024(1x) |
自动模式下由算法动态调整 |
|
awb_gain_g |
绿色通道增益 |
0-4095 |
1024(1x) |
通常作为基准,增益为 1x |
|
awb_gain_b |
蓝色通道增益 |
0-4095 |
1024(1x) |
自动模式下由算法动态调整 |
|
awb_speed |
收敛速度 |
0-10(0 最慢,10 最快) |
5 |
速度过快可能导致画面闪烁,过慢适应不及时 |
|
awb_sensitivity |
灵敏度 |
0-10(0 最低,10 最高) |
7 |
高灵敏度适合弱光环境,低灵敏度适合复杂光源 |
|
awb_white_threshold |
白色检测阈值 |
0-255 |
180 |
调整白色区域的识别范围 |
|
awb_gray_threshold |
灰度检测阈值 |
0-255 |
30 |
调整灰度区域的识别范围 |
表 3-7:RK1106 AWB 参数配置表
3.4.3 AWB 标定详细流程
AWB 标定需要在多种标准光源下进行,建立光源色温与 RGB 增益的对应关系,确保在不同光源环境下都能准确还原白色。
步骤 1:标定环境准备
硬件准备:
- RK1106 开发板及配套摄像头模组
- 标准光源箱(支持 2800K、4500K、6500K、9300K 等标准色温)
- 标准白色板(反射率 90%,漫反射特性)
- 色温计(用于测量实际光源色温)
- 三角架和白色板固定装置
环境要求:
- 暗室环境,避免环境光干扰
- 光源箱预热 30 分钟,确保光源稳定
- 摄像头与白色板距离合适,确保白色板充满整个画面
- 摄像头镜头调焦至清晰,避免虚焦影响标定精度
步骤 2:拍摄 AWB 标定图像
参数配置:
- 打开 Capture Tool,选择 "AWB" 模块
- 依次设置光源箱为 2800K、4500K、6500K、9300K 等标准色温
- 曝光设置:调整曝光时间和增益,使白色板的 RAW 值达到中灰水平(建议 1024-2048)
- BLC 和 LSC 参数已正确配置并开启
图像采集:
- 每个色温下拍摄多张图像,选择最稳定的一张
- 确保白色板在画面中居中,无阴影和反光
- 记录每张图像对应的实际色温(用色温计测量)
- 保存 raw 图,命名格式为 "awb_xxxxK.raw"(xxxx 为实际色温值)
步骤 3:计算 AWB 校正参数
导入标定图像:
- 启动 Calibration Tool,选择 "AWB" 标签页
- 依次导入不同色温下的标定图像
- 配置 raw 图参数(分辨率、位宽、Bayer 顺序)
白色区域分析:
- 工具自动识别图像中的白色区域
- 计算每个色温下白色区域的平均 RGB 值
- 确定各色温下的目标 RGB 比值(理想情况下 R:G:B=1:1:1)
增益计算:
- 以绿色通道为基准,计算红色和蓝色通道的所需增益
- 建立色温 - 增益对应表,生成 AWB 增益曲线
- 调整收敛速度和灵敏度参数,确保增益过渡平滑
参数保存:
- 点击 "Calibrate" 完成计算
- 保存 AWB 参数到 XML 文件,包含增益表、阈值等
- 记录关键参数,如各色温下的 RGB 增益、收敛速度
步骤 4:验证 AWB 效果
效果验证方法:
- 在多种光源环境下拍摄白色物体,观察白色还原效果
- 使用色彩分析仪测量白色区域的 RGB 比值,理想情况下 R/G 和 B/G 应接近 1.0
- 测试 AWB 的动态响应,快速切换光源,观察白平衡调整的收敛速度
常见问题排查:
|
问题现象 |
可能原因 |
解决方案 |
|
白色物体偏黄 |
红色或绿色增益不足 |
增加 awb_gain_r 或 awb_gain_g 参数 |
|
白色物体偏蓝 |
蓝色增益过高 |
降低 awb_gain_b 参数 |
|
AWB 收敛速度慢 |
收敛速度设置过低 |
提高 awb_speed 参数值 |
|
复杂光源下白平衡不稳定 |
灵敏度设置不当 |
调整 awb_sensitivity 参数,优化白色检测算法 |
|
低光环境下白平衡偏差大 |
低光下噪声影响 |
增加曝光时间,降低增益,优化低光白色检测 |
表 3-8:AWB 常见问题排查表
3.5 绿通道平衡校正(GIC)
3.5.1 GIC 技术原理与作用
绿通道平衡校正(Green Channel Imbalance Correction)是针对 Bayer 图像传感器的一种特殊校正技术,主要用于消除绿色通道在不同行或列之间的亮度差异,改善图像的整体均匀性。
Bayer 图像传感器的像素排列特点是绿色像素数量是红色和蓝色像素的两倍(通常采用 RGGB、GRBG 等排列方式),这种排列方式使绿色通道对图像亮度贡献最大,但也容易出现绿色通道的行间或列间不平衡现象,主要原因包括:
- 传感器制造工艺的细微差异导致不同行的绿色像素响应不一致
- 读取电路的噪声差异导致列间信号偏移
- 光学系统的微小瑕疵导致局部亮度变化
- 温度变化引起的电路特性漂移
GIC 的校正原理是通过分析绿色通道的行间或列间亮度差异,计算出每行或每列的校正系数,然后对绿色通道的每个像素根据其所在行或列应用相应的增益补偿,使整个绿色通道的亮度达到均匀一致。
3.5.2 RK1106 GIC 实现方式
瑞芯微 RK1106 的 GIC 模块支持行校正和列校正两种模式,可灵活配置校正精度和范围,特别适用于消除 Bayer 传感器常见的行带噪声。
|
GIC 参数 |
功能描述 |
取值范围 |
推荐值 |
调整建议 |
|
gic_enable |
GIC 功能开关 |
0: 关闭 1: 开启 |
1 |
正常使用时开启,特别是在低光环境下 |
|
gic_correction_mode |
校正模式选择 |
0: 行校正 1: 列校正 2: 行列校正 |
0(行校正) |
大多数情况下行校正即可解决问题,严重时选择行列校正 |
|
gic_row_gain |
行校正增益表 |
0-4095,每行一个值 |
1024(1x) |
根据行间亮度差异调整,亮度低的行增益高 |
|
gic_col_gain |
列校正增益表 |
0-4095,每列一个值 |
1024(1x) |
根据列间亮度差异调整,亮度低的列增益高 |
|
gic_smooth_enable |
平滑处理开关 |
0: 关闭 1: 开启 |
1 |
开启后可避免行或列之间出现明显过渡 |
|
gic_gain_limit |
增益限制值 |
512-2048 |
1536 |
防止个别行或列增益过高导致噪声放大 |
|
gic_detection_threshold |
差异检测阈值 |
0-255 |
20 |
调整亮度差异的检测灵敏度 |
|
gic_update_mode |
参数更新模式 |
0: 立即更新 1: 帧同步更新 |
1 |
避免参数更新导致画面闪烁 |
表 3-9:RK1106 GIC 参数配置表
3.5.3 GIC 标定详细流程
GIC 标定需要在均匀光源下拍摄标准图像,分析绿色通道的行间或列间差异,建立校正模型。
步骤 1:标定环境准备
硬件准备:
- RK1106 开发板及配套摄像头模组
- 标准均匀光源(亮度均匀性≥95%)
- 标准白色标定板(反射率 90%)
- 三角架和标定板固定装置
环境要求:
- 暗室环境,避免环境光干扰
- 光源稳定工作 30 分钟以上,确保亮度稳定
- 摄像头与标定板距离合适,确保标定板充满整个画面
- 摄像头镜头调焦至清晰,避免虚焦影响标定精度
步骤 2:拍摄 GIC 标定图像
参数配置:
- 打开 Capture Tool,选择 "GIC" 模块
- 光源选择:标准均匀光源(如 D65)
- 曝光设置:调整曝光时间和增益,使标定板亮度达到中灰水平(建议 RAW 值在 1024-2048 之间)
- BLC 参数已正确配置并开启,LSC 参数暂时关闭(避免影响 GIC 标定)
图像采集:
- 调整摄像头角度,确保标定板与画面完全对齐,无倾斜
- 确认画面中无阴影和反光
- 拍摄 raw 图并保存,命名为 "gic_calib.raw"
步骤 3:计算 GIC 校正参数
导入标定图像:
- 启动 Calibration Tool,选择 "GIC" 标签页
- 配置 raw 图参数(分辨率、位宽、Bayer 顺序)
- 点击 "Load Raw File" 导入拍摄的 GIC 标定图
绿色通道分析:
- 工具自动提取图像中的绿色通道数据
- 计算每行(或每列)的平均亮度值
- 生成亮度分布曲线,识别亮度差异明显的行(或列)
校正参数计算:
- 以亮度最均匀的行(或列)为基准,计算其他行(或列)的校正增益
- 应用平滑处理,使增益过渡更加自然
- 设置增益限制,避免过度补偿
参数保存:
- 点击 "Calibrate" 完成计算
- 预览校正效果,确认行带噪声是否明显改善
- 保存参数到 XML 文件,命名为 "gic_param.xml"
步骤 4:验证 GIC 效果
效果验证方法:
- 拍摄均匀白色画面,分别开启和关闭 GIC 功能
- 对比两种情况下的图像行间或列间亮度差异
- 使用 Analysis Tool 分析绿色通道的均匀性,理想情况下行间亮度差异应小于 5%
常见问题排查:
|
问题现象 |
可能原因 |
解决方案 |
|
校正后仍有明显行带 |
校正模式选择不当 |
从行校正改为行列校正,增加校正精度 |
|
图像出现网格状痕迹 |
平滑处理未开启 |
开启 gic_smooth_enable,调整平滑参数 |
|
局部区域亮度异常 |
增益限制设置不当 |
调整 gic_gain_limit 值,平衡校正效果和噪声 |
|
低光环境下校正效果差 |
噪声影响亮度检测 |
增加曝光时间,降低增益,提高检测阈值 |
表 3-10:GIC 常见问题排查表
3.6 Bayer 域降噪(Bayer NR)
3.6.1 Bayer NR 技术原理与作用
Bayer 域降噪(Bayer Noise Reduction)是在 RAW 域(Bayer 格式数据)进行的降噪处理,主要用于消除图像传感器在采集过程中产生的噪声,特别是在低光环境下由于提高增益而引入的噪声。
Bayer 格式图像的噪声主要来源包括:
- 光子噪声:由于光线的粒子特性导致的随机噪声
- 暗电流噪声:传感器在无光照条件下产生的噪声
- 读取噪声:信号读取电路产生的噪声
- 热噪声:由于温度变化导致的电路噪声
这些噪声在 Bayer 格式图像上表现为随机的亮点或暗点,严重影响图像质量。Bayer NR 的校正原理是利用 Bayer 格式图像的空间相关性,通过分析相邻像素的相似性,区分信号和噪声,对噪声进行平滑处理,同时尽量保留图像细节。
与后处理阶段的 YNR(Y 通道降噪)相比,Bayer NR 的优势在于在图像处理流程的早期阶段进行降噪,能够更有效地保留原始图像信息,减少后续处理对噪声的放大。
3.6.2 RK1106 Bayer NR 实现方式
瑞芯微 RK1106 的 Bayer NR 模块采用先进的空间域降噪算法,支持多档降噪强度配置,可根据不同的光照条件和噪声水平动态调整降噪参数,在降噪效果和细节保留之间取得平衡。
|
Bayer NR 参数 |
功能描述 |
取值范围 |
推荐值 |
调整建议 |
|
bayer_nr_enable |
Bayer NR 功能开关 |
0: 关闭 1: 开启 |
1 |
正常使用时开启,特别是低光环境 |
|
bayer_nr_strength |
降噪强度 |
0-10(0 最弱,10 最强) |
5 |
低光环境提高强度,强光环境降低强度 |
|
bayer_nr_mode |
降噪模式选择 |
0: 快速 1: 平衡 2: 高质量 |
1(平衡) |
对实时性要求高选择快速模式,对画质要求高选择高质量 |
|
bayer_nr_spatial_radius |
空间滤波半径 |
1-5 |
2 |
半径越大降噪效果越好,但细节损失越多 |
|
bayer_nr_temporal_enable |
时域降噪开关 |
0: 关闭 1: 开启 |
1 |
静态场景开启,动态场景关闭以避免拖影 |
|
bayer_nr_temporal_frames |
时域帧数 |
2-8 |
4 |
帧数越多降噪效果越好,但延迟越大 |
|
bayer_nr_edge_threshold |
边缘保护阈值 |
0-255 |
80 |
阈值越高边缘保护越强,细节保留越好 |
|
bayer_nr_noise_threshold |
噪声检测阈值 |
0-255 |
40 |
调整噪声的检测灵敏度 |
|
bayer_nr_gain_compensate |
增益补偿开关 |
0: 关闭 1: 开启 |
1 |
开启后可根据增益自动调整降噪强度 |
|
bayer_nr_gain_table |
增益 - 强度对应表 |
0-10,最多 16 个增益点 |
实测值 |
建立不同增益下的最优降噪强度 |
表 3-11:RK1106 Bayer NR 参数配置表
3.6.3 Bayer NR 调试详细流程
Bayer NR 调试需要在不同光照条件下进行,根据噪声水平和图像细节要求,调整降噪参数,找到最佳平衡点。
步骤 1:调试环境准备
硬件准备:
- RK1106 开发板及配套摄像头模组
- 可调光光源箱(支持 0.1lux-1000lux 亮度调节)
- 标准测试卡(包含细节图案和灰度梯度)
- 三角架和测试卡固定装置
环境要求:
- 可控制的光照环境,支持低光、正常光、强光三种场景
- 测试卡放置在稳定的支架上,避免抖动
- 摄像头与测试卡距离合适,确保测试卡充满画面
- 摄像头镜头调焦至清晰,确保细节图案可分辨
步骤 2:拍摄测试图像
参数配置:
- 打开 Capture Tool,选择 "Bayer NR" 模块
- 依次设置光源亮度为 0.1lux(低光)、100lux(正常光)、1000lux(强光)
- 曝光设置:每个亮度下调整曝光时间和增益,使图像亮度适中
- BLC、LSC 参数已正确配置并开启
图像采集:
- 每个亮度条件下拍摄多张图像,分别关闭和开启 Bayer NR
- 确保图像包含噪声区域和细节区域
- 保存 raw 图,命名格式为 "bayer_nr_xxxlux_off.raw" 和 "bayer_nr_xxxlux_on.raw"(xxx 为亮度值)
步骤 3:调整 Bayer NR 参数
低光环境调试(0.1lux):
- 打开 Tuner Tool,加载低光环境下的 raw 图
- 逐步提高 bayer_nr_strength,观察噪声减少情况
- 同时观察细节区域(如文字、线条)的保留情况
- 找到噪声明显减少且细节保留较好的强度值(通常为 7-9)
- 开启时域降噪(bayer_nr_temporal_enable=1),设置合适的时域帧数(4-6)
正常光环境调试(100lux):
- 加载正常光环境下的 raw 图
- 调整 bayer_nr_strength 至中等水平(4-6)
- 重点优化边缘保护阈值(bayer_nr_edge_threshold=70-90)
- 确保图像细节清晰,无明显模糊
强光环境调试(1000lux):
- 加载强光环境下的 raw 图
- 降低 bayer_nr_strength 至较低水平(1-3)
- 关闭时域降噪,避免动态场景拖影
- 调整噪声检测阈值,减少不必要的平滑处理
增益补偿配置:
- 在不同增益下(1x、2x、4x、8x、16x)拍摄测试图
- 建立增益 - 降噪强度对应表(bayer_nr_gain_table)
- 确保高增益下(8x 以上)降噪强度自动提高,低增益下自动降低
步骤 4:验证 Bayer NR 效果
效果验证方法:
- 客观评估:使用 Analysis Tool 测量噪声水平(如标准差)和细节保留程度(如 MTF)
- 主观评估:对比降噪前后的图像,观察噪声减少和细节保留的平衡
- 动态测试:拍摄动态场景,观察是否有拖影或模糊
常见问题排查:
|
问题现象 |
可能原因 |
解决方案 |
|
噪声仍然明显 |
降噪强度不足 |
提高 bayer_nr_strength 参数值 |
|
图像细节模糊 |
降噪强度过高 |
降低 bayer_nr_strength,提高边缘保护阈值 |
|
动态场景拖影 |
时域降噪开启 |
关闭 bayer_nr_temporal_enable,或减少时域帧数 |
|
不同增益下效果不一致 |
增益补偿未配置 |
配置 bayer_nr_gain_table,建立增益 - 强度对应关系 |
|
图像出现块效应 |
空间滤波半径过大 |
减小 bayer_nr_spatial_radius 参数值 |
表 3-12:Bayer NR 常见问题排查表
3.7 Y 通道降噪(YNR)
3.7.1 YNR 技术原理与作用
Y 通道降噪(Luminance Noise Reduction)是在 YUV 色彩空间的亮度通道(Y 通道)进行的降噪处理,主要用于消除亮度噪声,改善图像的整体洁净度和主观视觉效果。
与在 RAW 域进行的 Bayer NR 不同,YNR 工作在图像处理的后阶段,此时图像已经完成了 Bayer 插值、白平衡、色彩校正等处理,转换为 YUV 格式。Y 通道承载了图像的大部分细节信息和亮度信息,同时也是噪声的主要载体,特别是在低光环境下。
YNR 的校正原理是利用亮度信号的空间和时间相关性,通过多尺度滤波、边缘检测和保护等技术,在消除噪声的同时最大限度地保留图像细节。常见的 YNR 算法包括:
- 空间域滤波:如高斯滤波、中值滤波、双边滤波
- 频域滤波:如小波变换、傅里叶变换
- 时域滤波:如多帧平均、运动补偿时域滤波
- 自适应滤波:根据局部图像特性动态调整滤波参数
3.7.2 RK1106 YNR 实现方式
瑞芯微 RK1106 的 YNR 模块采用先进的自适应时空域降噪算法,支持多档降噪强度配置和动态场景检测,能够根据图像内容自动调整降噪策略,在不同场景下都能取得良好的降噪效果和细节保留平衡。
|
YNR 参数 |
功能描述 |
取值范围 |
推荐值 |
调整建议 |
|
ynr_enable |
YNR 功能开关 |
0: 关闭 1: 开启 |
1 |
正常使用时开启 |
|
ynr_strength |
降噪强度 |
0-10(0 最弱,10 最强) |
4 |
低光环境提高强度,强光环境降低强度 |
|
ynr_mode |
降噪模式 |
0: 柔和 1: 标准 2: 锐利 |
1(标准) |
对画质要求高选择柔和,对细节要求高选择锐利 |
|
ynr_spatial_filter |
空间滤波器类型 |
0: 高斯 1: 双边 2: 导向 |
1(双边) |
双边滤波兼顾降噪和边缘保护 |
|
ynr_spatial_sigma |
空间滤波标准差 |
0.1-5.0 |
1.5 |
标准差越大降噪效果越好,但细节损失越多 |
|
ynr_temporal_enable |
时域降噪开关 |
0: 关闭 1: 开启 |
1 |
静态场景开启,动态场景关闭 |
|
ynr_temporal_weight |
时域权重 |
0.1-0.9 |
0.5 |
权重越大时域降噪效果越强,但延迟越大 |
|
ynr_edge_protect |
边缘保护强度 |
0-10 |
7 |
强度越高边缘保护越好,细节保留越多 |
|
ynr_motion_threshold |
运动检测阈值 |
0-255 |
30 |
阈值越高对运动的敏感度越低,拖影风险增加 |
|
ynr_luminance_adapt |
亮度自适应开关 |
0: 关闭 1: 开启 |
1 |
开启后根据亮度自动调整降噪强度 |


















 908
908

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









