






目录
4.0 数字信号通信:从原理到历史的演进
4.0.1 通信的本质:信息如何 “跨越空间”?
4.0.2 模拟信号与数字信号:通信世界的 “两种语言”
4.0.3 数字信号通信的核心原理:编码、调制与解调
4.0.4 通信技术发展简史:从烽火台到 5G 无人机
4.0.5 无人机通信的特殊性:为何数学是 “稳定器”?
5.1 菲涅尔区与通视性分析
5.1.1 电磁波的 “绕弯” 能力:绕射现象的直观理解
5.1.2 菲涅尔区:电磁波的 “隐形安全通道”
5.1.3 第一菲涅尔区半径:计算公式与物理意义
5.1.4 通视性判断:如何用数学确定信号 “是否通畅”?
5.1.5 无人机通信中的菲涅尔区应用:避开遮挡的实战技巧
5.2 无人机通信链路预算:数学计算信号 “够不够强”
5.2.1 链路预算的 “收支平衡”:从发射到接收的能量账
5.2.2 自由空间损耗:距离如何 “削弱” 信号?
5.2.3 地形附加损耗:不同环境对信号的 “额外消耗”
5.2.4 链路预算的完整计算:无人机通信的 “可行性报告”
5.2.5 抗衰落设计:数学如何帮信号 “对抗衰减”?
5.3 不同地形下的信号优化策略:用数学 “定制” 通信方案
5.3.1 开阔地通信:平原地区的信号 “畅行无阻”
5.3.2 山地通信:如何让信号 “翻山越岭”?
5.3.3 城市通信:高楼间的信号 “穿梭术”
5.3.4 雨林与海洋:特殊环境的信号 “生存法则”
5.3.5 多地形自适应通信:无人机如何 “智能切换” 模式?
4.0 数字信号通信:从原理到历史的演进
4.0.1 通信的本质:信息如何 “跨越空间”?
通信的本质是信息的传递—— 无论是无人机与地面站的指令交互,还是手机通话,核心都是将 “想法”“数据” 转化为可传输的信号,通过介质(如空气、电缆)送到目的地后再还原。
比如,无人机拍摄的高清图像包含上亿个像素,这些信息无法直接 “扔” 向地面,必须先转化为电信号或电磁波,就像写信时要把想法转化为文字。数学在这里的作用,是让这个 “转化 - 传输 - 还原” 的过程更高效、更可靠。
通信系统的基本组成(用无人机举例):
- 信源:无人机的摄像头、传感器(产生图像、海拔等信息)
- 发送设备:无人机的信号发射器(将信息转化为电磁波)
- 信道:空气(电磁波传播的 “通道”,会受地形、天气影响)
- 接收设备:地面站的天线(捕捉电磁波并转化为电信号)
- 信宿:地面站的显示屏、处理器(还原出图像、数据)
这个过程中,每一步都依赖数学:比如信号的编码方式(用二进制 0 和 1 表示信息)、电磁波的传播路径计算(确保信号能到达)、噪声的过滤(用算法提取有效信号)。
4.0.2 模拟信号与数字信号:通信世界的 “两种语言”
通信信号分为模拟信号和数字信号,二者的区别就像 “手写体” 与 “印刷体”:
| 对比维度 | 模拟信号 | 数字信号 | 无人机中的应用场景 |
|---|---|---|---|
| 表现形式 | 连续变化的波形(如声波、正弦波) | 离散的 “0” 和 “1” 脉冲(如方波) | 模拟:早期无人机的遥控指令(简单) |
| 抗干扰能力 | 弱(噪声会改变波形,难以还原) | 强(0 和 1 只有两种状态,易区分) | 数字:现代无人机的高清图传、加密数据 |
| 传输效率 | 低(无法压缩,占用带宽大) | 高(可压缩、编码,节省带宽) | 数字:长距离侦察任务(节省能量) |
| 数学基础 | 连续函数(如正弦函数 y=A sin (ωt)) | 离散数学(二进制、矩阵运算) | 数字:需要复杂算法的场景 |
举例:
- 模拟信号:老式收音机接收的广播,信号受干扰会有杂音,就像手写体被弄脏后难以辨认。
- 数字信号:手机发送的微信消息,即使信号弱,也能通过纠错码还原完整内容,就像印刷体模糊后仍能识别。
无人机为何多用数字信号?因为无人机需要传输高清图像、精确坐标等复杂信息,且常处于复杂环境(如山区、城市),数字信号的抗干扰能力和高效性更适合。
4.0.3 数字信号通信的核心原理:编码、调制与解调
数字信号从产生到被接收,需经过编码→调制→传输→解调→解码五个步骤,每个步骤都离不开数学:
-
编码:将信息转化为二进制(0 和 1)
比如无人机拍摄的一个像素点亮度(0-255),可编码为 8 位二进制(如亮度 128→10000000)。
数学工具:信息论(香农定理),确保用最少的 0 和 1 表示最多的信息。 -
调制:将二进制信号 “加载” 到电磁波上
电磁波有三个参数:振幅(强度)、频率(快慢)、相位(起始位置)。调制就是通过改变这三个参数来 “携带” 0 和 1:- 调幅(AM):用振幅高低表示 0 和 1(高振幅 = 1,低振幅 = 0)
- 调频(FM):用频率快慢表示 0 和 1(高频 = 1,低频 = 0)
- 调相(PM):用相位变化表示 0 和 1(相位 0°=0,180°=1)
数学工具:三角函数(如调幅信号 y=A (1+k・s (t)) sin (ωt),s (t) 为 0/1 信号)。
-
传输:电磁波在空间中传播
传播过程中会衰减(能量减少)、受干扰(如其他电磁波的影响)。
数学工具:波动方程(描述电磁波传播)、概率论(分析干扰的随机性)。 -
解调:从电磁波中 “提取” 二进制信号
接收端通过电路 “反向操作” 调制,比如调幅信号通过检测振幅高低还原 0 和 1。
数学工具:傅里叶变换(分离不同频率的信号)。 -
解码:将二进制还原为原始信息
比如 8 位二进制 10000000 还原为亮度 128,再组合成图像。
数学工具:纠错码(如汉明码,通过额外的 0 和 1 修正错误)。
总结:数字信号通信就像 “打包快递”—— 编码是把物品装箱(二进制),调制是给箱子贴地址(加载到电磁波),传输是运输过程(会遇到路况问题),解调和解码是拆箱取物(还原信息)。数学则是 “打包规则”“路线规划” 和 “防损坏措施”。
4.0.4 通信技术发展简史:从烽火台到 5G 无人机
通信技术的发展史,本质是 “用数学解决更远、更快、更可靠传输” 的历史。以下是关键阶段:
| 时间 | 关键技术 | 数学突破 | 无人机相关应用 |
|---|---|---|---|
| 古代 | 烽火台、信鸽 | 几何(视线距离计算) | 无(未发明) |
| 1837 年 | 莫尔斯电码(有线电报) | 离散符号(点和划表示字母) | 无 |
| 1895 年 | 无线电报(马可尼) | 电磁学方程(麦克斯韦方程组) | 奠定无人机无线通信基础 |
| 1940 年代 | 调频(FM)技术 | 傅里叶变换(频率分析) | 早期无人机遥控(简单指令) |
| 1960 年代 | 数字通信(二进制) | 信息论(香农定理,1948 年提出) | 军用无人机开始传输数字坐标 |
| 1980 年代 | 蜂窝移动通信(2G) | 编码理论(纠错码) | 民用无人机短距离遥控 |
| 2000 年代 | 4G 技术 | 正交频分复用(OFDM,矩阵运算) | 无人机高清图传(1080P) |
| 2020 年代 | 5G 与卫星通信 | 机器学习(信号预测与优化) | 无人机编队通信、超视距控制 |
关键突破解析:
- 麦克斯韦方程组(1864 年):用数学公式预言了电磁波的存在,为无线电通信奠定基础。没有这组方程,就没有无人机的无线遥控。
- 香农定理(1948 年):指出 “在一定带宽和噪声下,通信速率有上限”,公式为 C=B log₂(1+S/N)(C 为速率,B 为带宽,S/N 为信噪比)。无人机设计时,需用此定理计算 “最多能传输多少数据”。
- OFDM 技术(1990 年代成熟):将信道分成多个子信道并行传输,用傅里叶变换处理频率,大幅提升速率。现代无人机图传(如 5.8GHz 图传)普遍采用。
4.0.5 无人机通信的特殊性:为何数学是 “稳定器”?
无人机通信与手机、广播等通信不同,有三个核心挑战,而数学是解决这些挑战的关键:
-
移动性强:无人机快速飞行时,与地面站的距离、角度不断变化,信号强度波动大。
数学解决方案:用多普勒效应公式(Δf = (v/c) f₀ cosθ,v 为速度,c 为光速,θ 为夹角)计算频率偏移,提前修正接收参数。 -
环境复杂:无人机常飞行在山区、城市等地形复杂区域,信号易被遮挡。
数学解决方案:菲涅尔区计算(判断遮挡程度)、地形损耗模型(预测信号衰减)。 -
能耗受限:无人机电池容量有限,发射功率不能太大(否则耗电快)。
数学解决方案:链路预算优化(用最少功率满足通信需求)、压缩算法(减少传输数据量)。
举例:
一架侦察无人机在山区飞行,需要将 1080P 图像(约 5MB / 帧)传回 20 公里外的地面站。若直接传输,需大功率发射器(耗电快)且易受地形遮挡。通过数学优化:
- 压缩算法(如 H.265)将图像压缩至 1MB / 帧(节省 80% 带宽);
- 菲涅尔区计算避开山峰遮挡,选择最佳飞行高度;
- 链路预算计算确定发射功率(如 1W),确保接收端能识别信号。
5.1 菲涅尔区与通视性分析
5.1.1 电磁波的 “绕弯” 能力:绕射现象的直观理解
电磁波(包括无人机通信的无线电波)并非严格 “走直线”,遇到障碍物时会像水流绕石头一样 “绕弯”—— 这种现象称为绕射。
生活中的绕射例子:
- 隔墙听声音:声波绕射(低频声波绕射能力强,所以能听到邻居的低音)。
- 无线电信号绕山:中波广播(波长几百米)能绕过大山,而电视信号(波长几米)易被遮挡。
绕射能力与波长密切相关:波长越长(频率越低),绕射能力越强。比如:
- 长波(波长 1km):能绕过大山、高楼,适合远距离通信(如潜艇通信)。
- 毫米波(波长 1mm):绕射能力弱,几乎沿直线传播,适合短距离高清通信(如无人机近距离图传)。
无人机通信常用频段及绕射能力:
| 频段 | 波长 | 绕射能力 | 无人机应用场景 | 缺点 |
|---|---|---|---|---|
| 1.2GHz | 25cm | 较强 | 长距离侦察(10km 以上) | 带宽窄,图像分辨率低 |
| 2.4GHz | 12.5cm | 中等 | 中距离控制(1-5km) | 易受 WiFi 干扰 |
| 5.8GHz | 5.2cm | 较弱 | 近距离高清图传(1km 内) | 绕射差,遮挡后信号易断 |
5.1.2 菲涅尔区:电磁波的 “隐形安全通道”
菲涅尔区是围绕 “直射路径”(发射端到接收端的直线)的一系列同心椭球区域,就像多层洋葱环绕中轴线。电磁波的能量主要通过这些区域传播,尤其是第一菲涅尔区(最内层),包含约 90% 的能量。
形象理解:
把电磁波想象成 “水流”,直射路径是 “主河道”,菲涅尔区是 “河道两侧的浅滩”。若浅滩被完全堵塞(障碍物侵入第一菲涅尔区),水流(信号)就会大幅减少;若只堵塞一部分,水流仍能绕过。
菲涅尔区的特点:
- 离发射端和接收端越近,菲涅尔区半径越小;中间位置半径最大。
- 波长越长,菲涅尔区半径越大(长波的 “安全通道” 更宽)。
为什么菲涅尔区重要?
无人机通信中,即使发射端和接收端 “视线可见”(无直接遮挡),若障碍物(如树木、电线杆)侵入第一菲涅尔区,信号仍会严重衰减。比如:
- 一架无人机在 500 米高度飞行,地面站在 2 公里外,中间有一棵 20 米高的树。若树的顶端进入第一菲涅尔区,图传可能出现卡顿。
5.1.3 第一菲涅尔区半径:计算公式与物理意义
第一菲涅尔区的最大半径(中间位置)计算公式为: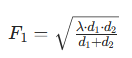
其中:
- F1:第一菲涅尔区半径(单位:米)
- λ:电磁波波长(单位:米,λ = 光速 / 频率,如 5.8GHz 的 λ≈0.052 米)
- d1:障碍物到发射端的距离(单位:米)
- d2:障碍物到接收端的距离(单位:米)
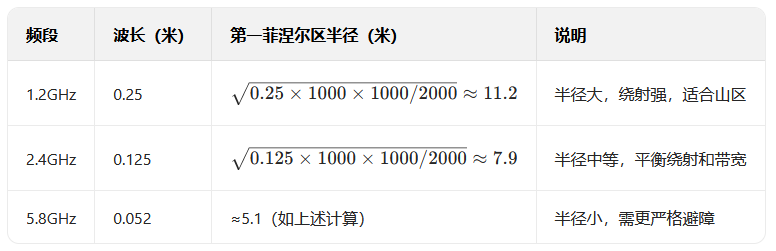
计算示例:
无人机(发射端)与地面站(接收端)相距 2000 米,中间有一障碍物(距无人机 1000 米,距地面站 1000 米),使用 5.8GHz 频段(λ=0.052 米):
即障碍物顶端到直射路径的垂直距离需小于 5.1 米,才不会严重影响信号。
不同频段的菲涅尔区半径对比(距离 2000 米,中间障碍物):
5.1.4 通视性判断:如何用数学确定信号 “是否通畅”?
通视性并非 “看得见就通畅”,而是指 “第一菲涅尔区是否被严重遮挡”。判断标准:
- 若障碍物顶端到直射路径的垂直距离 h≤0.6×F1:信号通畅(绕射足够)。
- 若 h>0.6×F1:信号衰减严重(视为 “不通视”)。
0.6 倍的由来:
工程实践发现,当障碍物侵入第一菲涅尔区的 40% 以内(即保留 60% 以上),绕射损耗小于 1dB(几乎无影响);超过 40%,损耗急剧增加(如侵入 50% 时损耗达 6dB,信号强度减半)。
步骤:判断无人机与地面站的通视性
- 测量:无人机高度 H1、地面站高度 H2、障碍物高度 H3、障碍物到无人机水平距离 d1、到地面站水平距离 d2。
- 计算直射路径在障碍物处的高度 H0:
直射路径是直线,高度随距离线性变化:
- 计算障碍物相对直射路径的高度差 h:h=H3−H0
(若 h<0,说明障碍物在直射路径下方,无遮挡) - 计算第一菲涅尔区半径 F1(用之前的公式)。
- 比较 h 与 0.6×F1:
- h≤0.6×F1:通视良好
- h>0.6×F1:信号受遮挡
实例:
无人机在 100 米高度(H1=100),地面站在 10 米高度(H2=10),中间有一山丘:
- d1=1000米,d2=1000米,山丘高度 H3=80米,使用 2.4GHz(λ=0.125 米)。
步骤 1:计算 ![]()
步骤 2:计算![]()
步骤 3:计算 
步骤 4:![]()
5.1.5 无人机通信中的菲涅尔区应用:避开遮挡的实战技巧
无人机飞行中,需实时计算菲涅尔区,调整高度或路径以避免信号遮挡。以下是具体方法:
-
预规划路径时避开高障碍物
在地图上标记山峰、高楼等障碍物,计算其是否侵入第一菲涅尔区。若侵入,规划绕行路线或提高飞行高度。例:某山区任务,无人机需从 A 到 B(2 公里),中间有一 30 米高山峰。计算发现山峰侵入第一菲涅尔区,于是将路径偏移 50 米,绕过山峰。
-
动态调整高度
飞行中用传感器(如 GPS、气压计)实时获取自身和障碍物高度,计算 h 并与 0.6×F1 比较,若 h 过大,自动升高高度。公式:需升高的最小高度 ΔH=h−0.6×F1

-
选择合适频段(建议同学们检查回看第一章内容,航迹规划)
复杂地形优先用长波(如 1.2GHz),其更大的菲涅尔区半径能容忍更多遮挡。例如:- 5.8GHz 在山区可能需要升高 50 米才能避开遮挡;
- 1.2GHz 可能只需升高 20 米(因 F1 更大,0.6×F₁也更大)。
5.2 无人机通信链路预算:数学计算信号 “够不够强”
5.2.1 链路预算的 “收支平衡”:从发射到接收的能量账
链路预算是计算 “信号从发射到接收的能量变化”,判断接收端能否 “读懂” 信号。核心公式:![]()
- 发射功率(Pₜ):无人机发射器输出的功率(单位:dBm,1dBm=1 毫瓦,30dBm=1 瓦)。
- 总损耗(Lₜₒₜₐₗ):信号传输中的各种衰减(自由空间损耗、地形损耗等)。
- 天线增益(Gₜ + Gᵣ):发射天线和接收天线对信号的放大作用(单位:dBi,全向天线约 2dBi,定向天线可达 10dBi 以上)。
- 接收灵敏度(Pᵣₘᵢₙ):接收端能识别的最小功率(如 - 100dBm,值越小接收能力越强)。
链路预算的目标:接收功率 ≥ 接收灵敏度(即 Pr≥Prmin)。
5.2.2 自由空间损耗:距离如何 “削弱” 信号?
即使在无遮挡的理想环境(如空旷平原),信号也会因 “扩散” 而衰减 —— 这称为自由空间损耗(FSL),与距离的平方成正比:
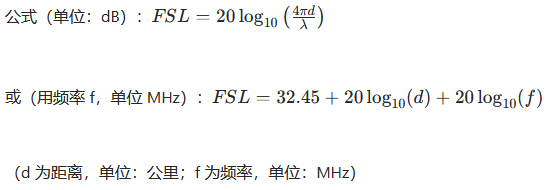
举例:
无人机用 5.8GHz(5800MHz)在 1 公里处通信:
距离对损耗的影响(5.8GHz):
| 距离(公里) | 自由空间损耗(dB) | 信号衰减倍数(相对于 1 公里) |
|---|---|---|
| 1 | 107.65 | 1 |
| 2 | 113.67(+6dB) | 4(损耗翻倍,信号强 1/4) |
| 5 | 123.65(+16dB) | 25 |
| 10 | 130(+22.35dB) | 100 |
结论:距离每增加一倍,自由空间损耗增加约 6dB(信号强度变为 1/4)。因此,无人机远距离通信需大功率发射器或高增益天线。
5.2.3 地形附加损耗:不同环境对信号的 “额外消耗”
除自由空间损耗,地形会带来额外损耗(Lₜₑᵣᵣₐᵢₙ)。以下是常见地形的附加损耗:
| 地形类型 | 附加损耗(dB) | 原因分析 | 无人机应对策略 |
|---|---|---|---|
| 开阔地 | 0-5 | 几乎无遮挡,仅少量地面反射 | 用全向天线,功率可降低 |
| 郊区(低矮建筑) | 10-20 | 房屋、树木遮挡,反射较多 | 提高飞行高度,避开密集建筑群 |
| 城市(高楼) | 20-35 | 高楼遮挡严重,多径效应(信号反射后相互干扰) | 用定向天线(对准地面站),缩短通信距离 |
| 丘陵 | 15-25 | 起伏地形部分遮挡,绕射损耗 | 选择山顶作为中继点 |
| 山地(陡峭) | 30-40 | 山峰遮挡,需绕射传播 | 改用长波(1.2GHz),增加发射功率 |
| 雨林 | 15-25 | 树叶吸收信号(尤其高频) | 降低飞行高度,贴近树梢飞行 |
多径效应:
城市中,信号除直射路径外,还会经高楼反射形成 “多条路径” 到达接收端,不同路径的信号可能相互抵消(如相位相反),导致接收功率忽强忽弱(“快衰落”)。数学解决方案:用分集接收(多天线接收不同路径信号),通过矩阵运算选择最强信号。
5.2.4 链路预算的完整计算:无人机通信的 “可行性报告”
步骤:计算某城市环境下的链路预算
无人机参数:发射功率 20dBm(100 毫瓦),发射天线增益 2dBi,接收天线增益 5dBi,接收灵敏度 - 100dBm。
任务:城市中通信,距离 1 公里,5.8GHz 频段。
计算自由空间损耗(FSL):![]()
加地形附加损耗(城市取 30dB):![]()
计算接收功率:![]()
![]()
对比接收灵敏度:
-110.65 dBm < -100 dBm(接收功率低于灵敏度)→ 通信不可行。
改进方案:
- 换用定向天线(增益 10dBi):接收功率 = 20+10+5-137.65 = -102.65 dBm(仍略低)。
- 再提高发射功率至 27dBm(500 毫瓦):接收功率 = 27+10+5-137.65 = -95.65 dBm ≥ -100 dBm → 可行。
5.2.5 抗衰落设计:数学如何帮信号 “对抗衰减”
即使链路预算达标,信号仍可能因突发干扰(如阵风导致无人机晃动、突发电磁干扰)衰减,需用数学方法增强抗干扰能力:
-
功率控制:
实时监测接收功率,用 PID 算法调整发射功率:
(K_p 为比例系数,目标功率通常比灵敏度高 10dB,留有余地)
纠错编码:
在数据中加入冗余信息(如每 8 位数据加 4 位校验位),接收端用数学算法(如海明码、Turbo 码)纠正错误。
例:Turbo 码在信噪比为 1dB 时,误码率可低至 10⁻⁶(几乎无错误)。
跳频技术:
信号在多个频率间快速切换(如每秒 1000 次),避开干扰频率。数学上用伪随机序列(如 m 序列)生成跳频图案,确保收发端同步。
5.3 不同地形下的信号优化策略:用数学 “定制” 通信方案
5.3.1 开阔地通信:平原地区的信号 “畅行无阻”
开阔地(如草原、沙漠)是最理想的通信环境,损耗主要来自自由空间,优化策略聚焦 “高效传输”:
| 优化目标 | 数学方法 | 具体措施 |
|---|---|---|
| 最大化传输速率 | 香农定理(C=B log₂(1+S/N)) | 用高频段(5.8GHz)增加带宽(B),降低功率节省能耗 |
| 延长通信距离 | 自由空间损耗公式(L∝d²) | 用定向天线(增益 10dBi),补偿距离损耗 |
| 抗干扰 | 信噪比(S/N)最大化 | 跳频技术避开干扰,纠错编码(如 LDPC 码) |
例:草原侦察任务(10 公里)
- 频段:2.4GHz(平衡速率和绕射)
- 链路预算:发射功率 25dBm(316 毫瓦)+ 定向天线 10dBi → 接收功率 - 90dBm(高于灵敏度 - 100dBm)
- 数据速率:2Mbps(足够传输实时视频)
5.3.2 山地通信:如何让信号 “翻山越岭”
山地通信的核心是 “克服遮挡”,需结合菲涅尔区计算和频段选择:
-
路径规划:
用数字高程模型(DEM)生成地形剖面,计算各点菲涅尔区,选择 “菲涅尔区被遮挡最少” 的路径。数学工具:地形梯度分析(寻找坡度平缓的路线)。 -
中继策略:
在山顶部署中继无人机(或地面站),形成 “多跳通信”。中继点选择需满足:
与前一站通视(菲涅尔区无遮挡)
覆盖尽可能多的下一站
数学模型:用图论(最小生成树)选择最优中继点,使总损耗最小。
频段选择:
对比不同频段的绕射能力和损耗:
| 频段 | 10 公里损耗(dB) | 需发射功率(dBm) | 优势 |
|---|---|---|---|
| 1.2GHz | 自由空间 70 + 山地 30 = 100 | 20(100 毫瓦) | 绕射强,适合多山区域 |
| 2.4GHz | 自由空间 76 + 山地 30 = 106 | 26(400 毫瓦) | 速率较高,平衡性能 |
| 5.8GHz | 自由空间 88 + 山地 30 = 118 | 38(6.3 瓦) | 速率高,但需大功率,适合短距离 |
结论:优先用 1.2GHz,若需高清图传,用 2.4GHz 并增加中继。
5.3.3 城市通信:高楼间的信号 “穿梭术”
城市通信的最大挑战是多径效应和遮挡,优化策略聚焦 “避开障碍、增强抗干扰”:
-
波束成形技术:
用多天线阵列(如 4 根天线),通过矩阵运算控制每个天线的相位,使信号在目标方向叠加增强,在干扰方向抵消。数学工具:MIMO(多输入多输出)系统,信道矩阵奇异值分解。 -
高度优化:
城市中,信号强度随高度先增后减(低空受遮挡,高空多径效应强),存在 “最佳高度”。通过多次测量拟合函数:
求导得最佳高度 H=−b/(2a)(通常在 50-100 米)。
3.中继网络:
在高楼顶部部署固定中继点,形成 “蜂窝网络”,无人机在不同区域自动切换中继。数学模型:用马尔可夫链预测无人机移动轨迹,提前切换中继。
5.3.4 雨林与海洋:特殊环境的信号 “生存法则”
-
雨林:树叶对电磁波(尤其高频)吸收强,优化策略:
- 用长波(1.2GHz)减少吸收损耗;
- 低空飞行(50 米以下),利用树干间的空隙传播;
- 缩短通信距离(如每 2 公里设一中继)。
-
海洋:海面反射导致 “镜像干扰”(直射信号与海面反射信号抵消),优化策略:
- 调整天线角度,使反射信号与直射信号相位相同( constructive interference);
- 用圆极化天线(如右旋圆极化),减少反射信号干扰(反射后极化方向反转)。
5.3.5 多地形自适应通信:无人机如何 “智能切换” 模式
先进无人机可通过传感器(GPS、陀螺仪、摄像头)识别地形,自动切换通信参数,实现 “一处一策”:
| 地形识别 | 切换参数 | 数学决策依据 |
|---|---|---|
| 从开阔地进入城市 | 频段从 5.8GHz→2.4GHz,开启跳频 | 检测到多径衰落(方差 > 10dB),触发切换 |
| 进入山地 | 发射功率增加 5dB,天线切换为全向 | 菲涅尔区遮挡率 > 40%,自由空间损耗突增 |
| 进入雨林 | 降低数据速率(从 2Mbps→500kbps) | 接收信号强度 < -90dBm,通过降低速率提高信噪比 |
自适应算法:
用强化学习训练无人机,将 “地形特征→通信参数→信号质量” 作为训练数据,通过 Q-learning 算法找到最优策略。例如:
- 奖励函数:信号质量高(+10 分)、功率低(+5 分)、速率高(+3 分)
- 经过 1000 次训练后,无人机可在 0.1 秒内完成地形识别和参数切换。
结语:数学是信号的 “导航仪”
从菲涅尔区的几何计算,到链路预算的能量平衡,再到不同地形的优化策略,数学贯穿无人机通信的每一个环节。它不仅能预测信号的 “旅程”,还能在遇到障碍时找到 “捷径”—— 就像给信号装上 “导航仪”,确保无人机在复杂环境中始终 “保持联系”。
未来,随着无人机向 swarm(集群)发展,数学将在更复杂的 “多机协同通信” 中发挥作用,比如用博弈论分配频段、用拓扑优化设计通信网络,让成百上千架无人机像 “蜂群” 一样高效协作。而这一切的基础,仍是对通信原理和数学工具的深刻理解。


















 4903
4903

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









