



一、四轴电调 CW/CCW 对角设计的本质原因
核心原理:反扭矩平衡与机身稳定性
四轴飞行器的四个电机需通过对角转向相反(CW 顺时针 / CCW 逆时针)的设计来抵消飞行时的反扭矩。例如,前左(CCW)和后右(CCW)为一组,前右(CW)和后左(CW)为另一组,形成两组对角反向旋转的布局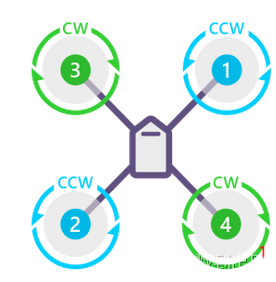
1. 反扭矩产生机制
当电机带动螺旋桨旋转时,空气会对螺旋桨施加反作用力矩(反扭矩),导致机身向与螺旋桨旋转方向相反的方向旋转。若所有电机同向旋转,机身将因反扭矩无法平衡而失控自旋
2. 对角反向的物理意义
- 扭矩抵消:两组对角电机反向旋转时,其产生的反扭矩大小相等、方向相反,相互抵消,使机身保持稳定。例如,前左(CCW)和后右(CCW)产生的逆时针扭矩,与前右(CW)和后左(CW)产生的顺时针扭矩相互平衡
- 姿态控制基础:通过调整对角电机的转速差,可实现俯仰、滚转、偏航等动作。例如,增加前右(CW)和后左(CW)的转速,机身会向该方向倾斜,产生向前飞行的动力。
3. 错误安装的后果
若电调与电机转向未按对角反向连接(如相邻电机转向相同),会导致:
- 机身剧烈自旋:反扭矩无法抵消,飞行器无法悬停。
- 飞行失控:姿态控制失效,易发生碰撞或坠机
4. 验证与调试方法
- 电机测试:通过飞控地面站(如 QGroundControl)单独控制每个电机,观察旋转方向是否符合对角反向要求
- 桨叶安装:CCW 电机需搭配逆时针螺旋桨(桨叶凸起标记为银色),CW 电机搭配顺时针螺旋桨(黑色标记),安装错误会导致升力方向错误。
二、4 轴 / 6 轴 / 8 轴布局的核心差异与应用场景
1. 4 轴(X 型 / H 型)
- 电机排布:
- X 型:电机呈 X 形分布,对角线夹角 90°,机动性最强(如 MARK4)。
- H 型:前后轴距较长,左右轴距较短,稳定性优于 X 型
- 转向规则:对角电机反向(如前左 CCW、后右 CCW,前右 CW、后左 CW)。
- 适用场景:FPV 竞速、航拍入门,成本低(500-2000 元),开源资源丰富(如 Betaflight 固件)。
2. 6 轴(Hexacopter)
- 电机排布:
- 典型布局:6 个电机呈六边形分布,相邻电机转向相反(如 1 号 CCW、2 号 CW、3 号 CCW)。
- 特殊设计:部分植保无人机采用 “宝石型” 布局,4 号与 5 号转向一致,6 号与 1 号一致,以适应特定作业需求
- 核心优势:
- 冗余性:单电机故障时仍可安全降落。
- 大载重:可携带 2-3kg 设备(如农药喷洒系统)。
- 缺点:能耗高(续航缩短 20%),结构复杂,成本较高(2000-10000 元)
3. 8 轴(Octocopter)
- 电机排布:
- 常见方案:8 个电机呈圆形或方形分布,相邻电机转向相反(如 1 号 CCW、2 号 CW、3 号 CCW)。
- 工业级设计:部分机型采用倾斜安装(如 ±3°),优化气流分布。
- 核心优势:
- 超重载:可载重 5kg 以上(如大型测绘设备)。
- 极端稳定性:抗风性强(7 级风仍可作业)。
- 适用场景:专业影视拍摄、电力巡检,成本高达 10000 元以上,依赖定制化飞控(如大疆 A3)。
三、上下共轴对转布局的原理与应用
1. 共轴双旋翼设计
- 核心原理:上下两组旋翼同轴安装,旋转方向相反(上旋翼 CCW,下旋翼 CW),完全抵消反扭矩,无需尾桨
- 结构特点:
- 套筒轴传动:上下旋翼通过同一传动轴驱动,需解决机械同步性问题。
- 刚性桨叶:采用碳纤维或钛合金材质,减少上下旋翼碰撞风险
2. 典型应用
- 舰载无人机:如俄罗斯卡 - 28 直升机,机身紧凑(长度比单旋翼短 30%),适合航母起降。
- 高速验证机:美国 S-97 直升机采用共轴刚性旋翼 + 尾部推进桨,速度可达 460km/h,解决了传统共轴直升机的 “桨叶碰撞” 难题。
3. 优缺点对比
- 优势:
- 无尾桨设计:节省 10% 发动机功率,降低故障率。
- 高机动性:悬停精度 ±0.1m,适合狭小空间作业
- 缺点:
- 结构复杂:套筒轴加工难度大,成本是四轴的 5 倍以上。
- 易碰撞风险:上下旋翼间距需≥0.5m,急转时可能发生机械干涉。
四、小白入门选型与调试建议
1. 电机转向检查步骤
- 硬件验证:
- 移除螺旋桨,上电后通过飞控地面站(如 Mission Planner)单独控制每个电机。
- 观察电机旋转方向是否符合对角反向规则(如前左 CCW、后右 CCW,前右 CW、后左 CW)。
- 软件调试:
若转向错误,在飞控参数中调整电机通道的反转设置(如 PX4 的SERVOn_REVERSE参数)。
2. 不同布局的适用场景
- 新手练习:选择 4 轴 X 型(如大疆 Mini 3 Pro),成本低且调试简单。
- 专业需求:6 轴 / 8 轴适合载重任务,共轴对转适合舰载或高速场景,但需专业培训。
- 避坑提示:避免混用不同转向的电调和电机,否则可能导致飞控 PID 参数调试失败。
3. 常见问题解决方案
- 机身自旋:检查电机转向是否正确,或飞控 PID 参数是否未校准(如 D 值过高)。
- 续航过短:6 轴 / 8 轴建议使用 4S 以上锂电池(如 2200mAh 25C),避免小容量电池大电流放电。
五、总结
四轴电调的 CW/CCW 对角设计是平衡反扭矩的基础,而多轴布局的选择需根据载重、稳定性和成本综合考量。共轴对转布局虽技术先进,但更适合专业领域。对于小白,从 4 轴 X 型入门,掌握电机转向规则和基础调试方法,是迈向无人机进阶的关键一步。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









