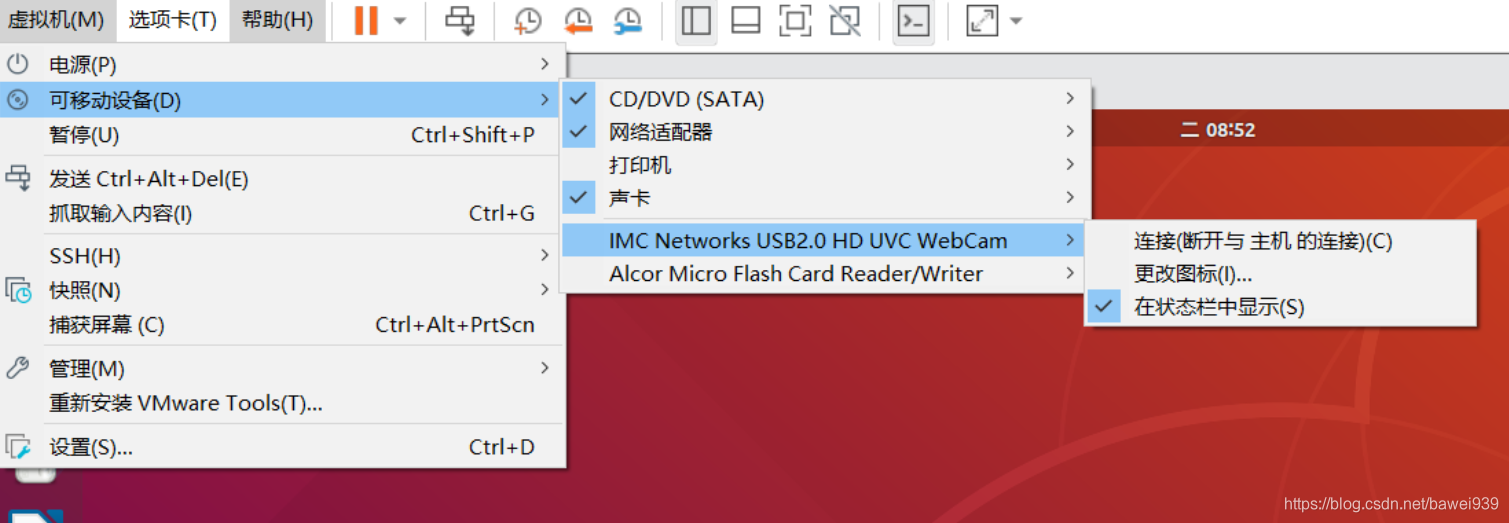
文章目录 一、准备摄像头 二、使用Rviz 三、Rviz显示摄像头 一、准备摄像头 1.找到虚拟机设置,将USB设置为3.1 2.连接摄像头 3.连接成功如下 4.检查能否使用 使用cheese命令 二、使用Rviz 1.启动Rviz 打开两个终端分别执行以下命令 roscore rviz 三、Rviz显示摄像头 1.安装uvc camera包 sudo apt-get install ros-melodic-uvc-camera
 637
814
637
814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























