






项目地址:srl-freiburg/pedsim_ros: Pedestrian simulator powered by the social force model![]() https://github.com/srl-freiburg/pedsim_ros我将对我安装步骤 一步步来说明
https://github.com/srl-freiburg/pedsim_ros我将对我安装步骤 一步步来说明
1.官网步骤
cd [workspace]/src
git clone https://github.com/srl-freiburg/pedsim_ros.git
cd pedsim_ros
git submodule update --init --recursive
cd ../..
catkin build -c # or catkin_make1)运行到4时 就是git update,有时会因为网络不好无法进行更新,这时候多输入几次 重复应该就能解决。
2)最后一步 catkin build,我到这一步出现了文件ignore,以及失败。这里对于ignore可以source devel/setup.bash 解决文件无法识别问题;对于后者失败,可以去其问题处有一个文件需要修改
然后我完成上述步骤后,就还剩下一个文件出现问题,其插件问题,libprotoc文件有问题,经过我 处理发现我的protoc版本为3.4.1,而这里的gazebo11版本支持的是3.6.1,因此需要卸载我的3.4安装新的。
3)卸载protoc,可以按照网络或者ai帮助你完成卸载工作(这里我还卸载了libprotoc和其所有依赖)并且要确保 which protoc 后没有任何显示,如果有 就进入其显示路径 删去其二进制文件,一般需要rm -f xx/xx/xx/protoc。这样完成卸载后就需要重新下载一遍
4)我卸载后 并把gazebo发现也卸载了,因此我重新按照gazebo和其依赖,最后发现新安装的protoc正是3.6.1版本 ,于是按照项目的代码重新安装一遍
5)重新安装后发现很多依赖没有安装,这个时候就一个个安装依赖就好了,不会的把错误放入ai中 一个个安装就行。这里说明我的一个roslib安装显示没有,这里我安装了roscpp,也没有,这里需要安装rospy才能解决。安装之后应该就没有问题了
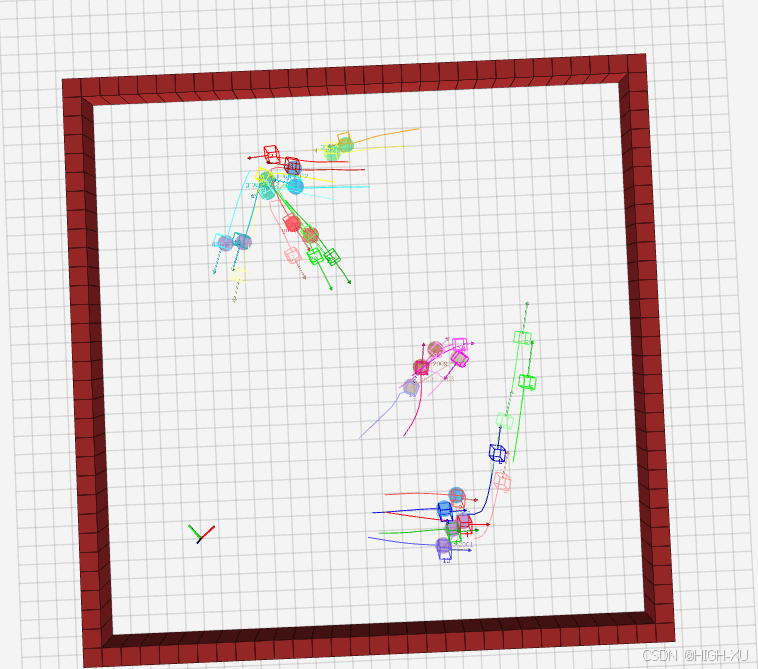
6)安装完成 就能调用里面的插件来完成效果,这里附官网代码的结果


















 834
834

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









