






系统版本ununtu20.04,本人第一次完成在gazebo环境中调用cartographer完成建图,原先跟着鱼香ros,在ros2中实现过,但未在ros1中实现,原先在ros1中也仅仅只是调用数据包,未能按照自己的想法来完成仿真环境下的建图,于是自己决定从头到尾来实现这个。
这个博客的记录,一是记录自己的步骤以及问题,便于后续需要;二是从网上看到许多教程与博客很是详细,但自己实力雀氏有限未能完成,总是有其他问题,因此集多方资源,自己决定尝试并留下这个记录,以便后来人能够按照我这个流程能够完成gazebo仿真环境下的cartographer图!!!避免后续花费过多时间在这个上面,也希望大家与我一起来完成。
1.在虚拟机上完成ubuntu20.04环境搭建
首先打开vm虚拟机软件,并新建一个ubuntu 20.04环境
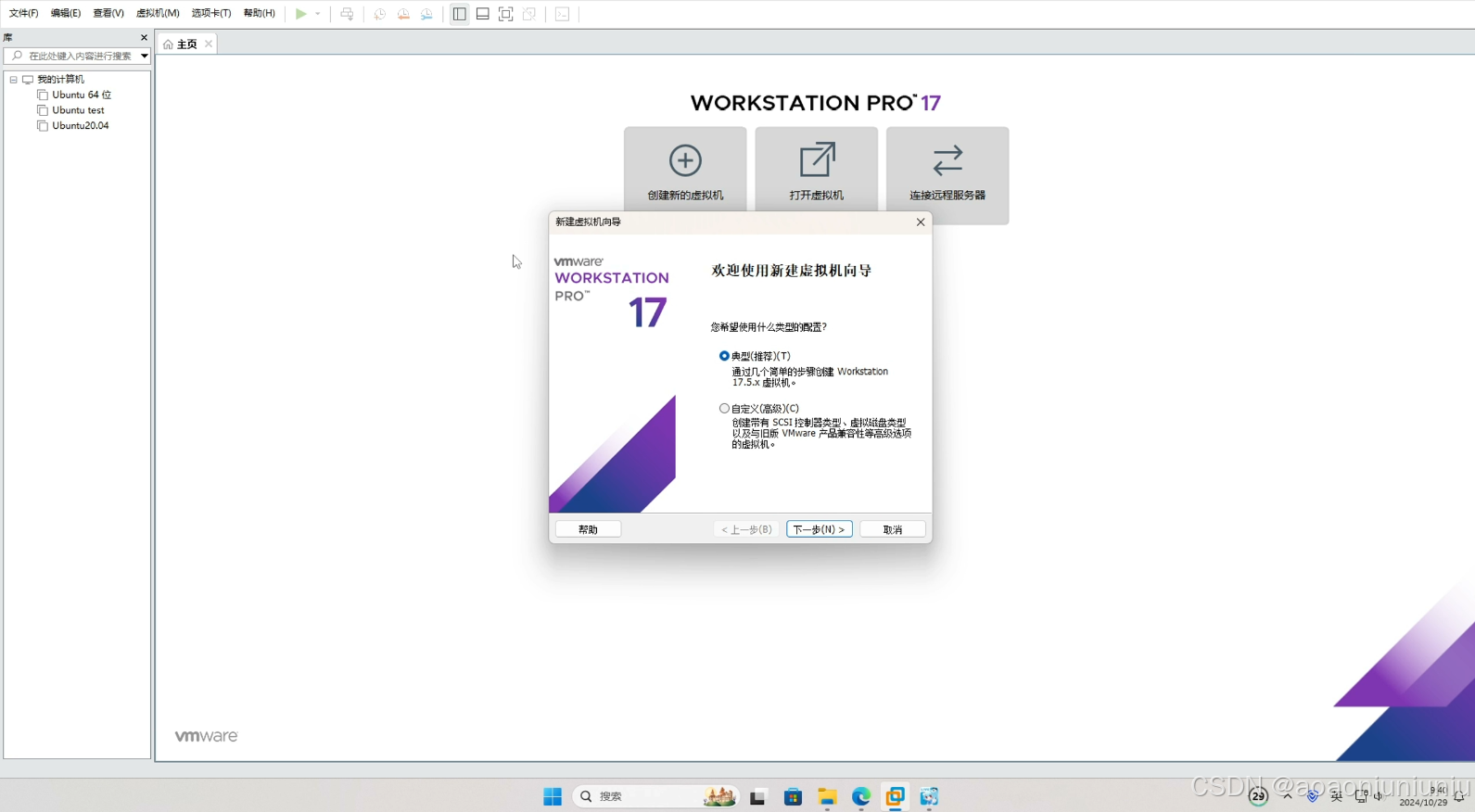
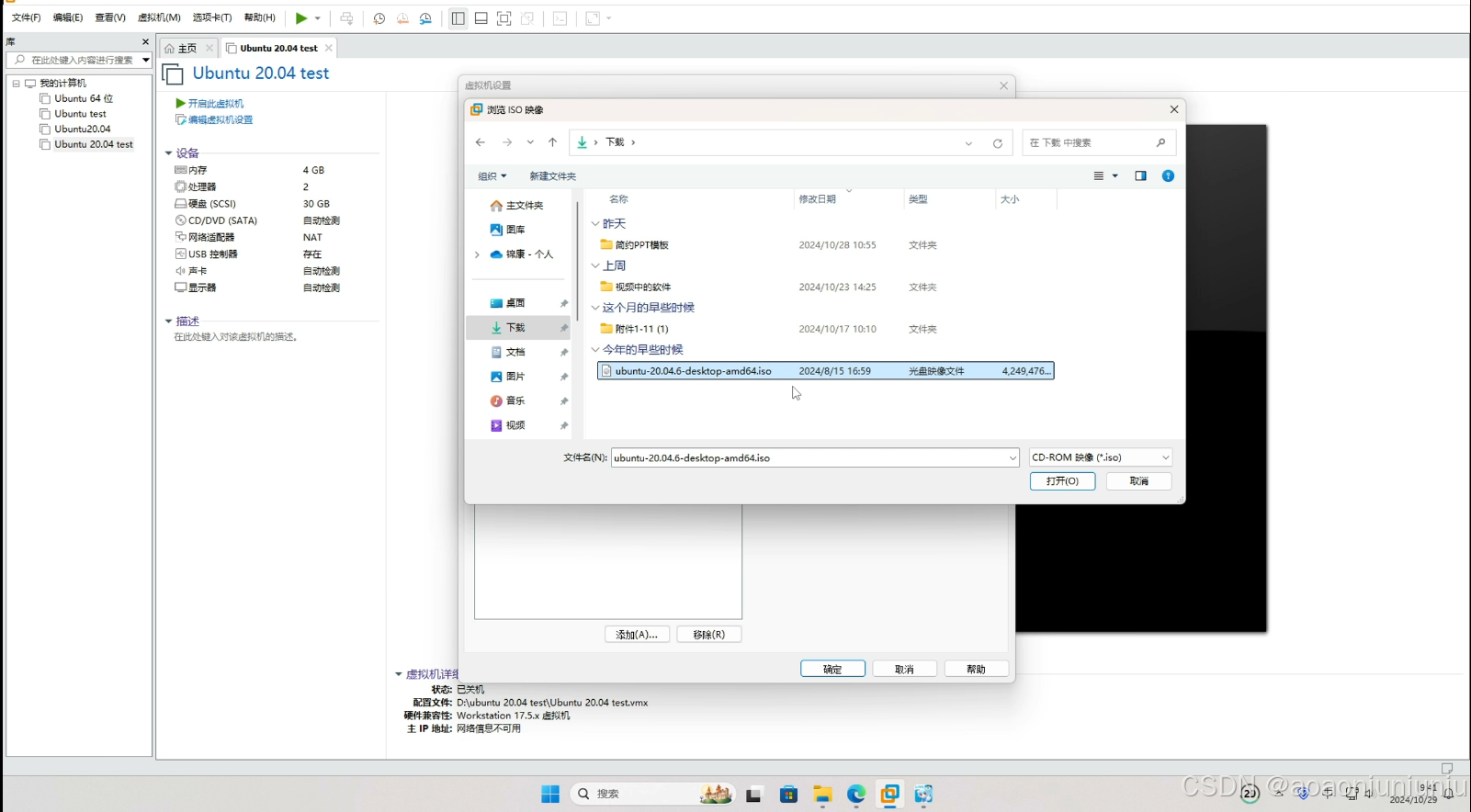
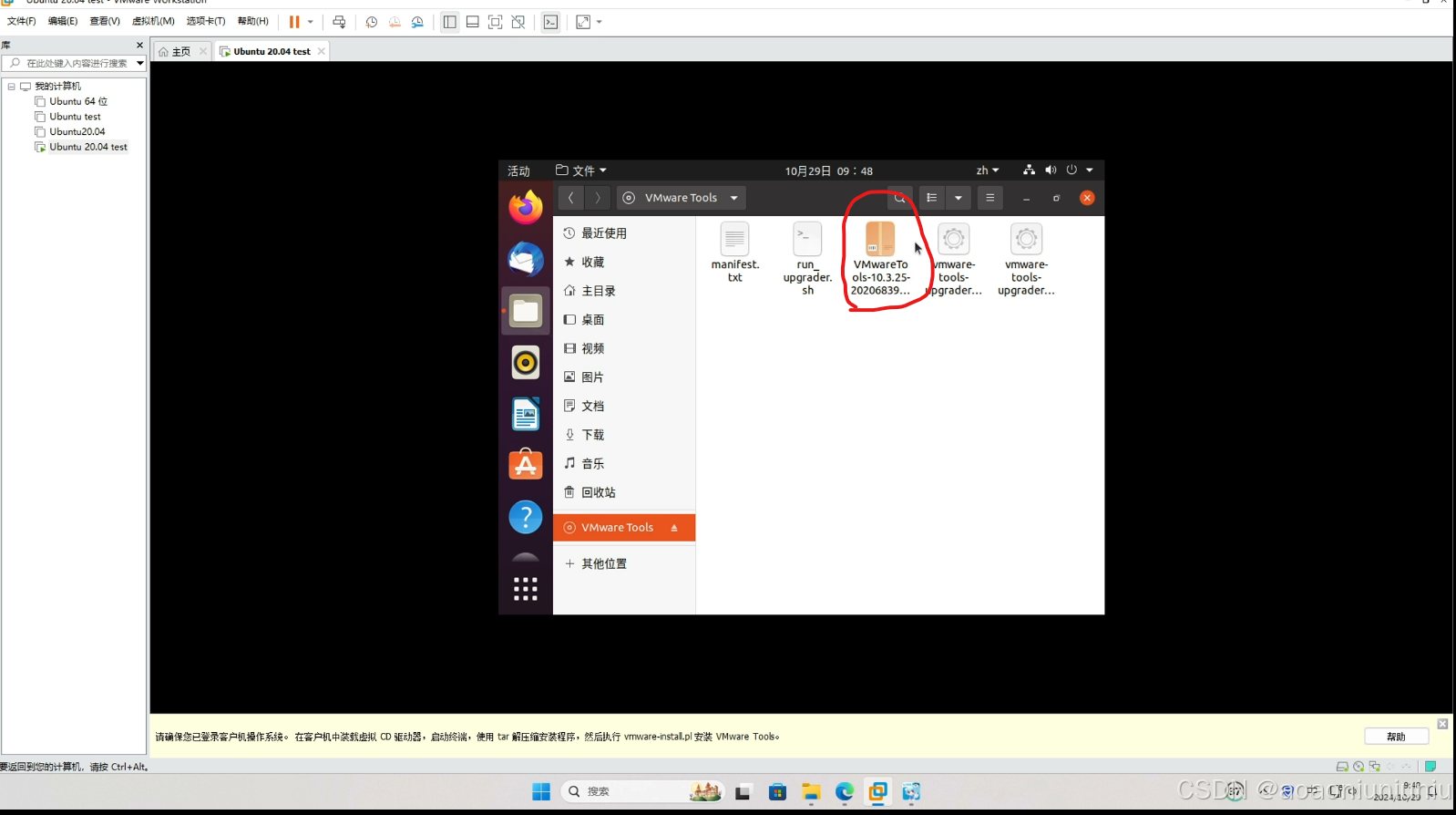
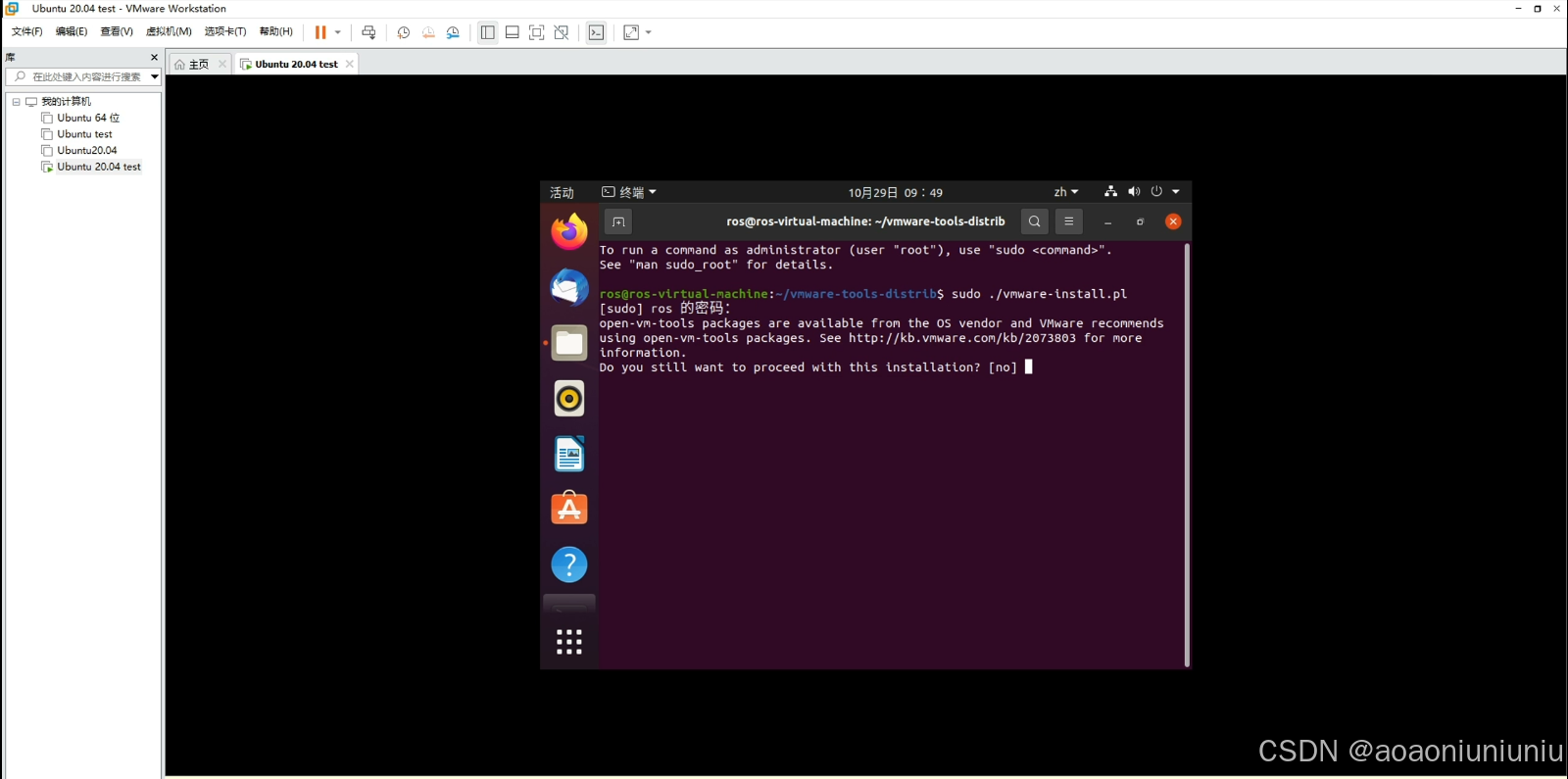
建立基础配置后,直接进入ubuntu20.04中,并压缩vm-tools文件夹,让画面全部填充,此时ubuntu20.04系统配置完成。
2.ros环境搭建
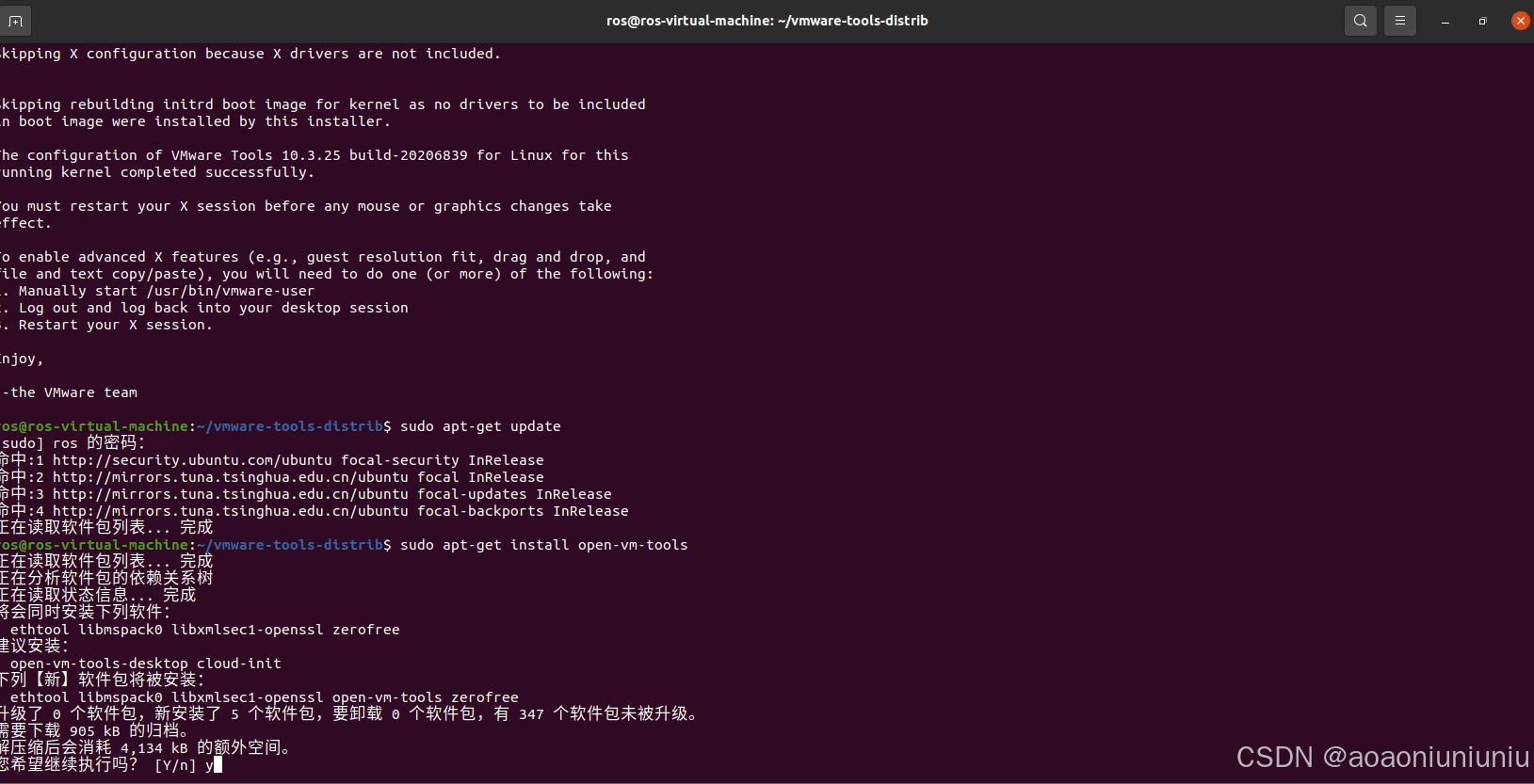
首先解决复制粘贴问题,这个对我或者99%而言很重要!!!
sudo apt-get update
sudo apt-get install open-vm-tools
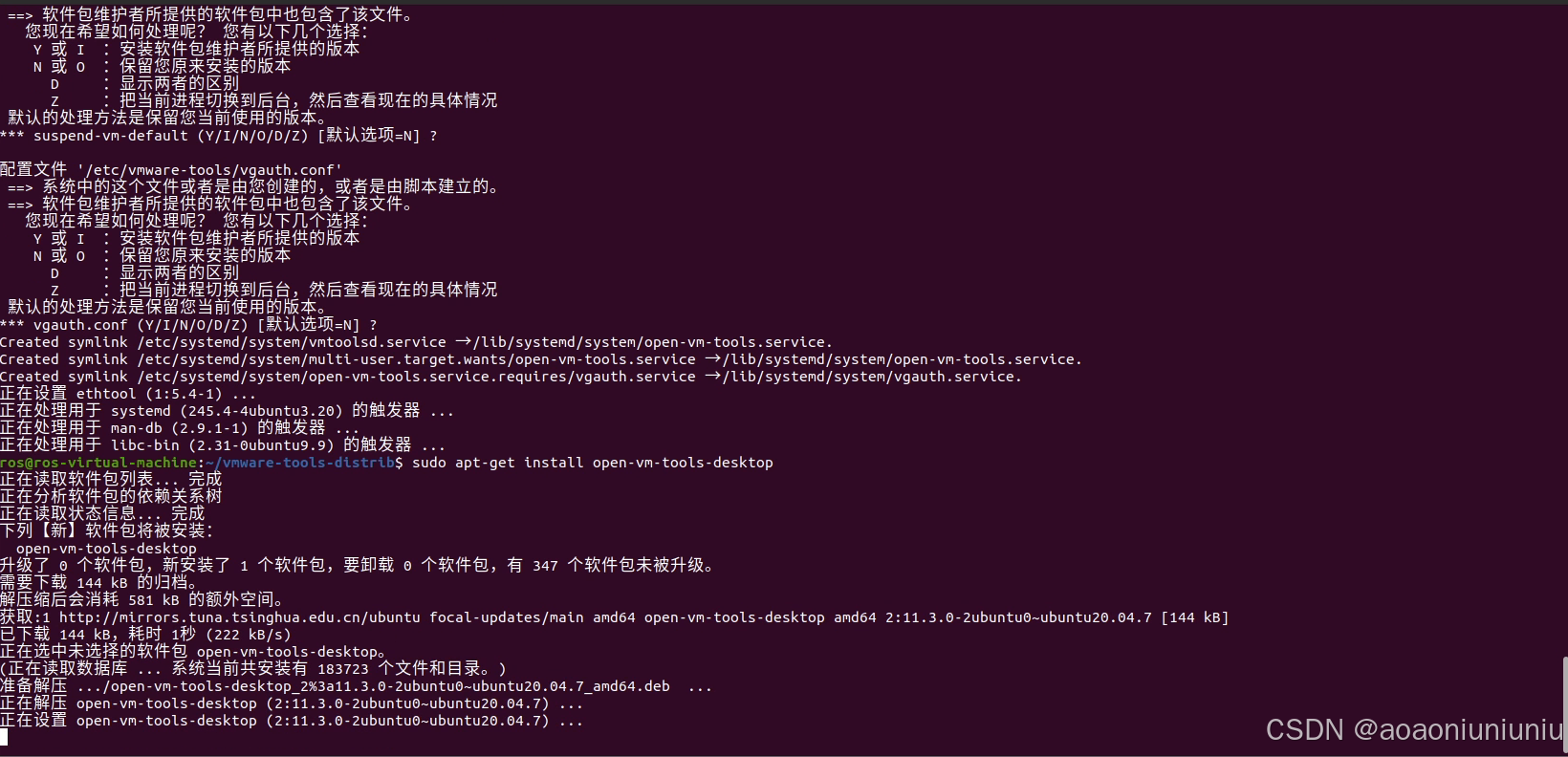
sudo apt-get install open-vm-tools-desktop
然后重启,即可实现复制粘贴

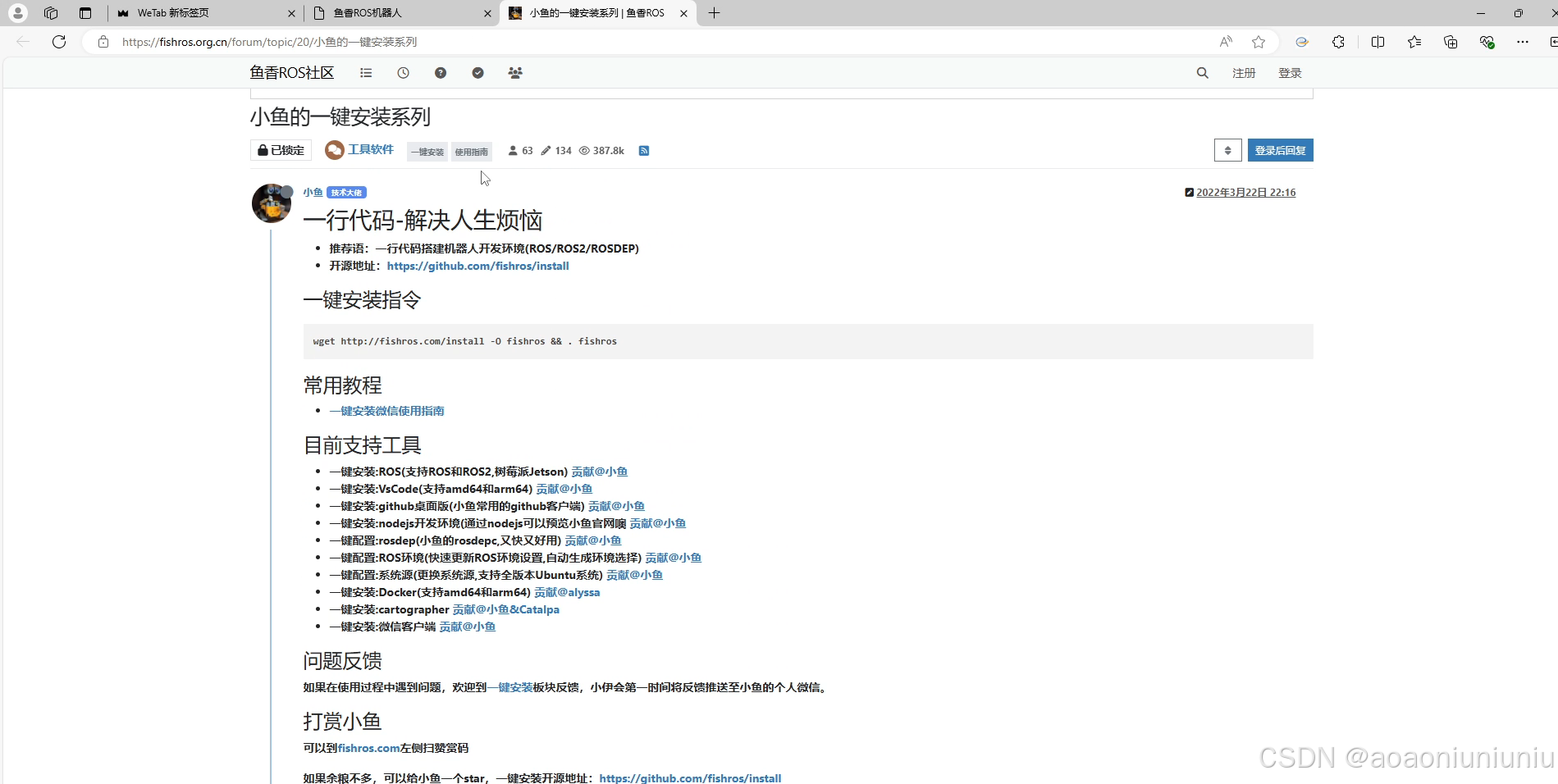
然后要打开鱼香ros网站,借助它的一键安装指令来实现后续操作
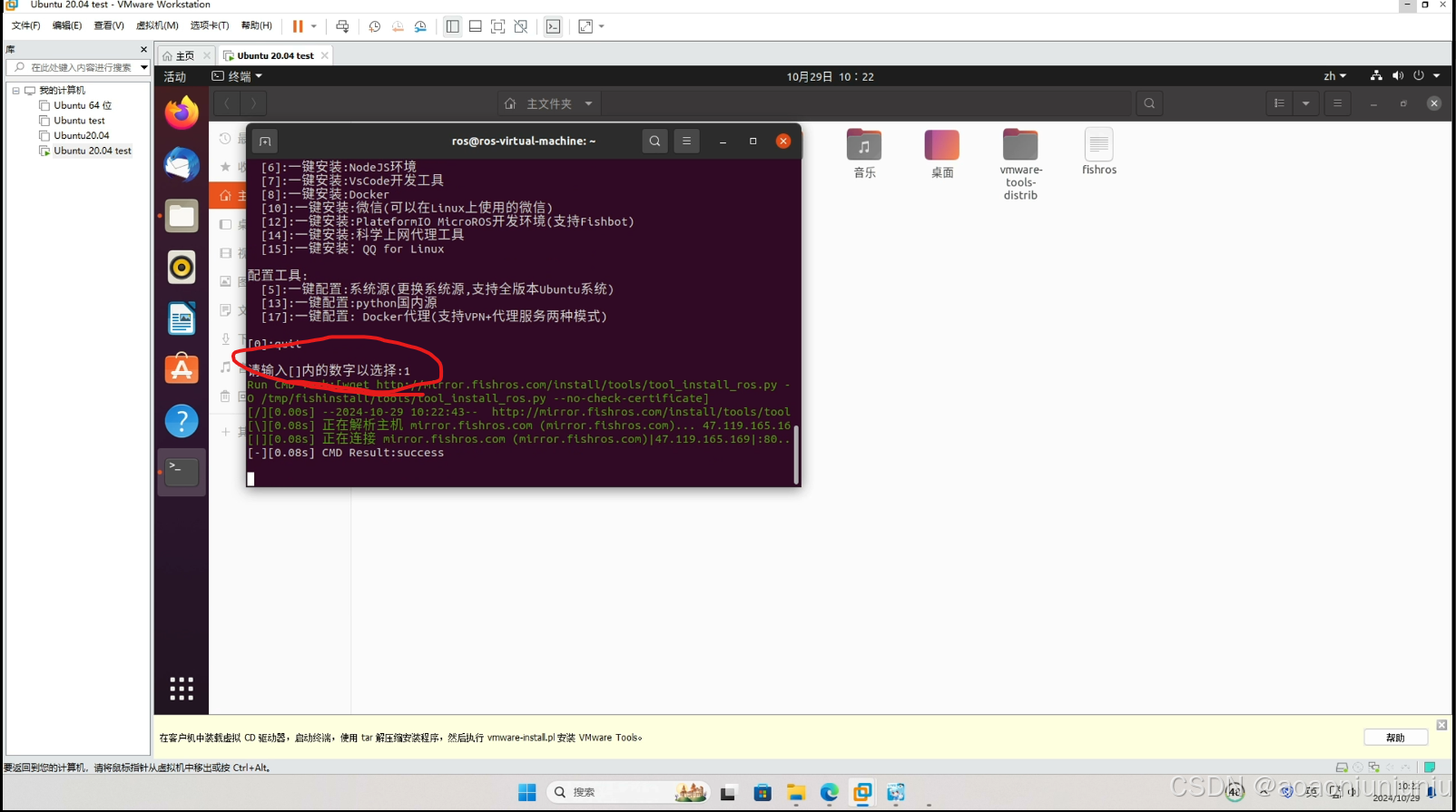
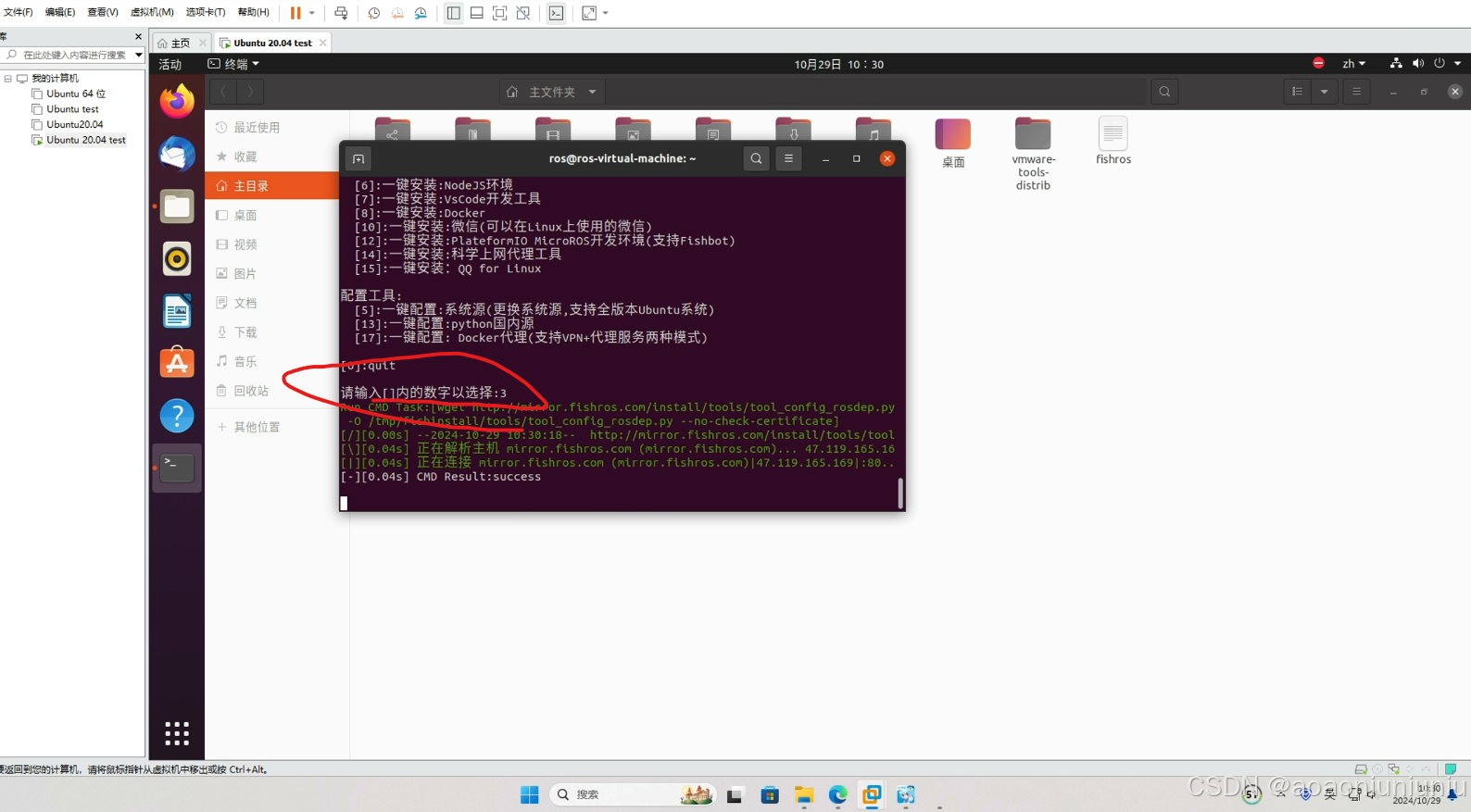
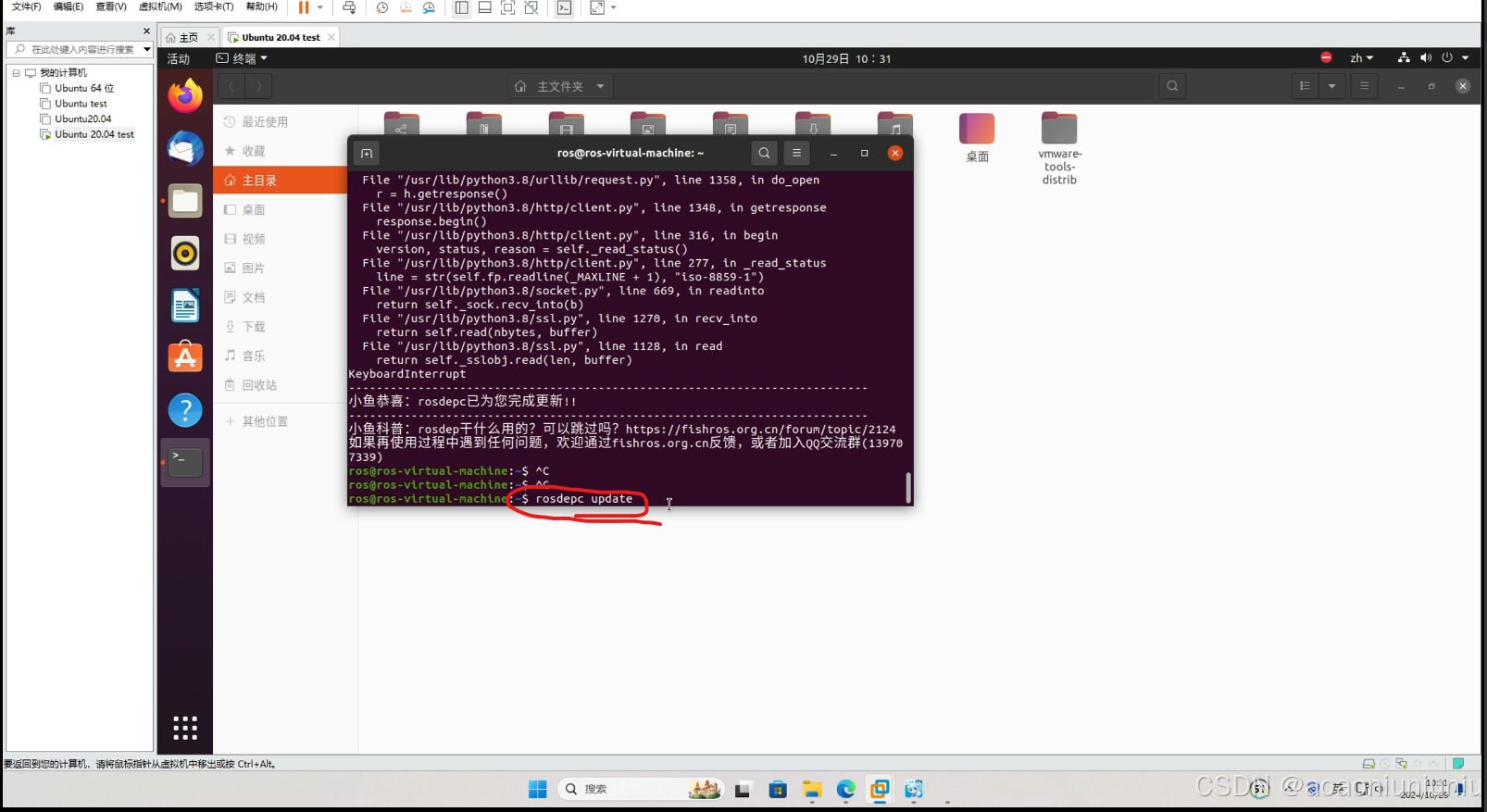
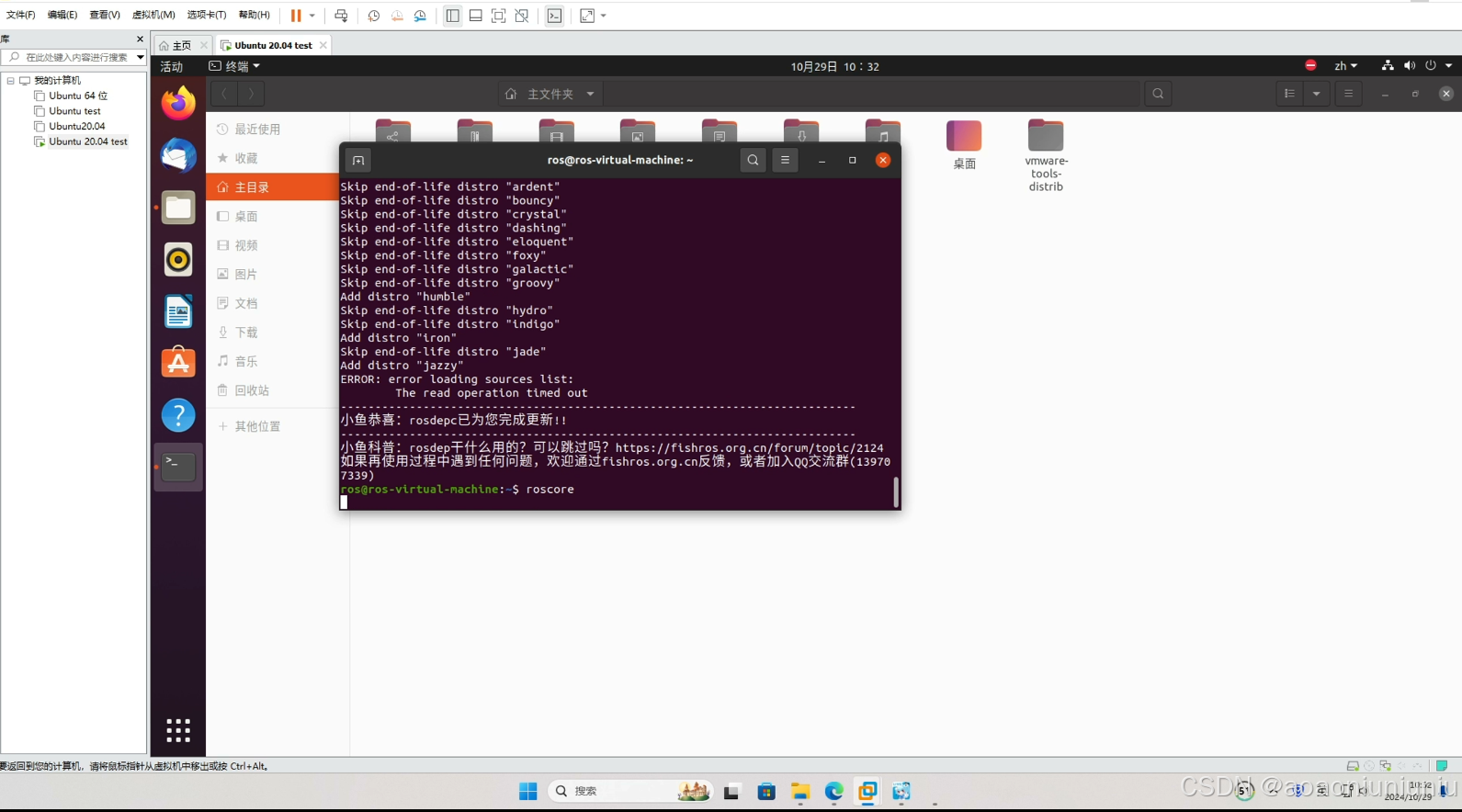
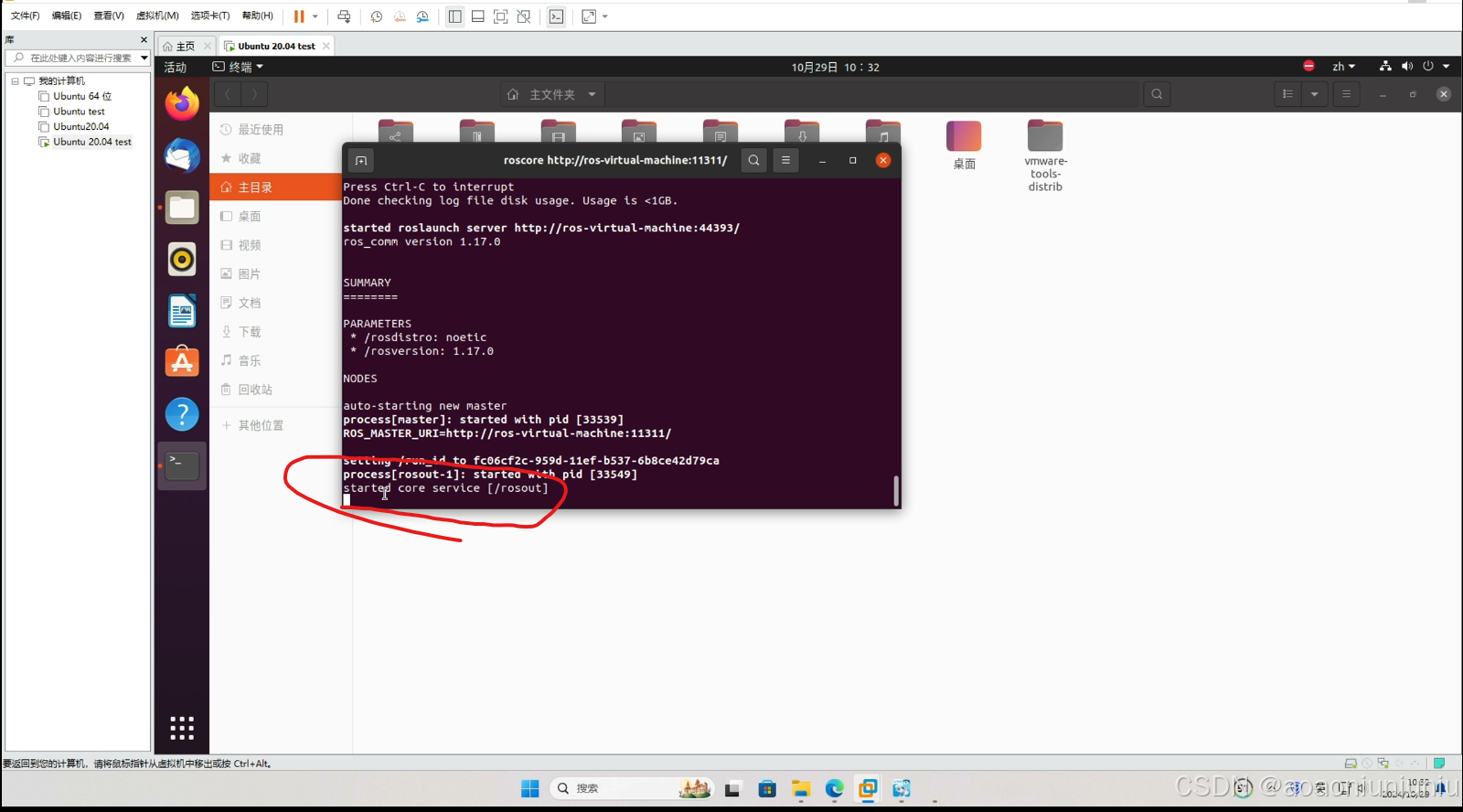
完成之后用roscore 检验下是否成功,成功界面如下
之后就是进行cartographer依赖包以及代码的安装,有兴趣的话请关注跟进我的博客哦
大家如有需要,可以看视频操作,视频是全流程步骤,需要的依赖或者操作都可以在视频里面看到,欢迎大家看视频 cartographer仿真建图系列1_哔哩哔哩_bilibili

















 386
386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









