






想学习了解一下visual slam相关方面,于是就将ORB-SLAM2下载下来,跑一下数据集。
具体思路与步骤是根据下面两个博客来,完成安装、编译以及跑通官方数据集
orbslam2 安装与运行_orbslam2安装-优快云博客
下面我将详细说明我个人的步骤:
环境 ubuntu20.04
1.安装Pangolin包、opencv包,安装如下:
步骤就紧跟上面两个就行,其中ubuntu20.04的博客步骤清晰简单,如遇报错问题,即可参考第一个 博客
2.安装orb-slam2代码
根据ubuntu20.04的博客一步步来即可,遇到问题参考第一个,安装结果如下:
我安装的是解析版,路径如下:https://github.com/electech6/ORB_SLAM2_detailed_comments
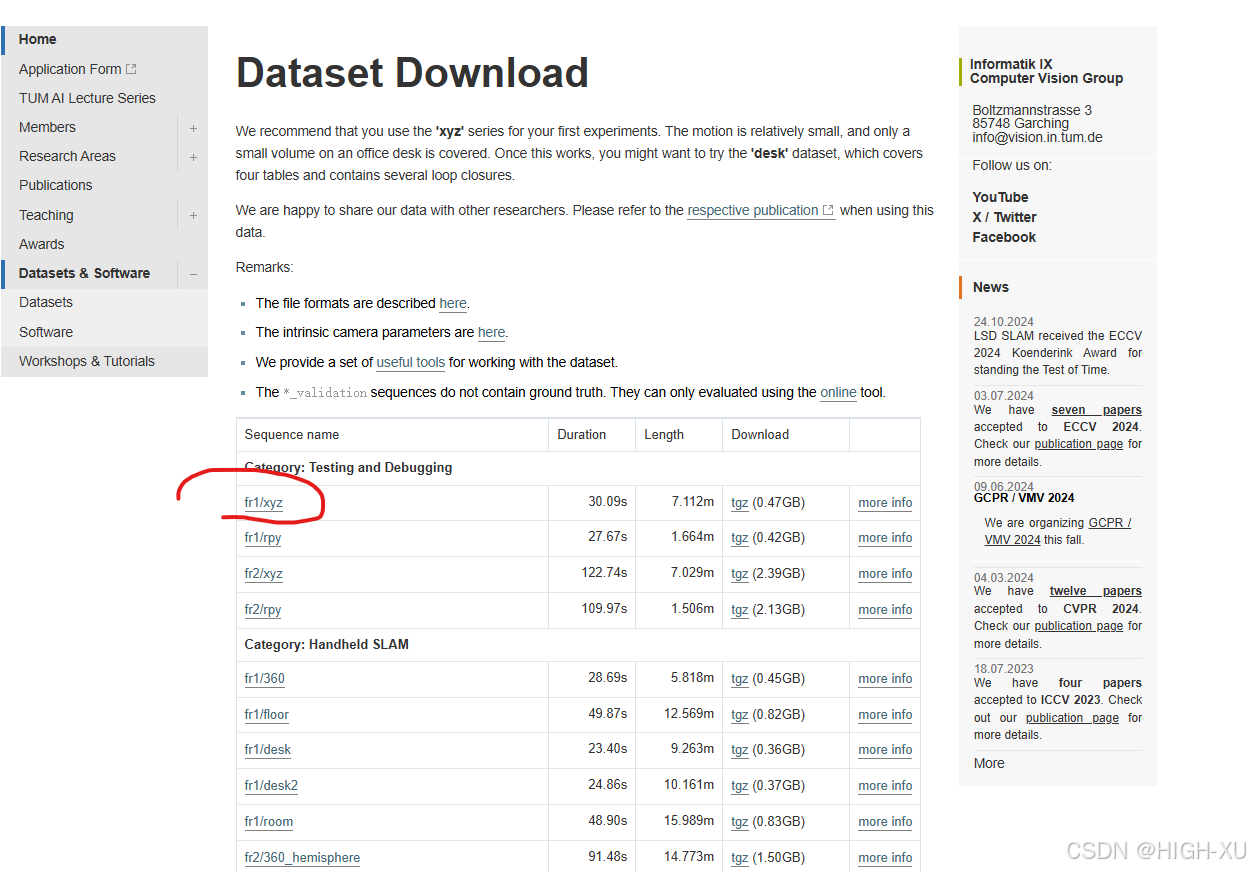
3.下载安装包
来到TMU数据集这,下载第一个即可
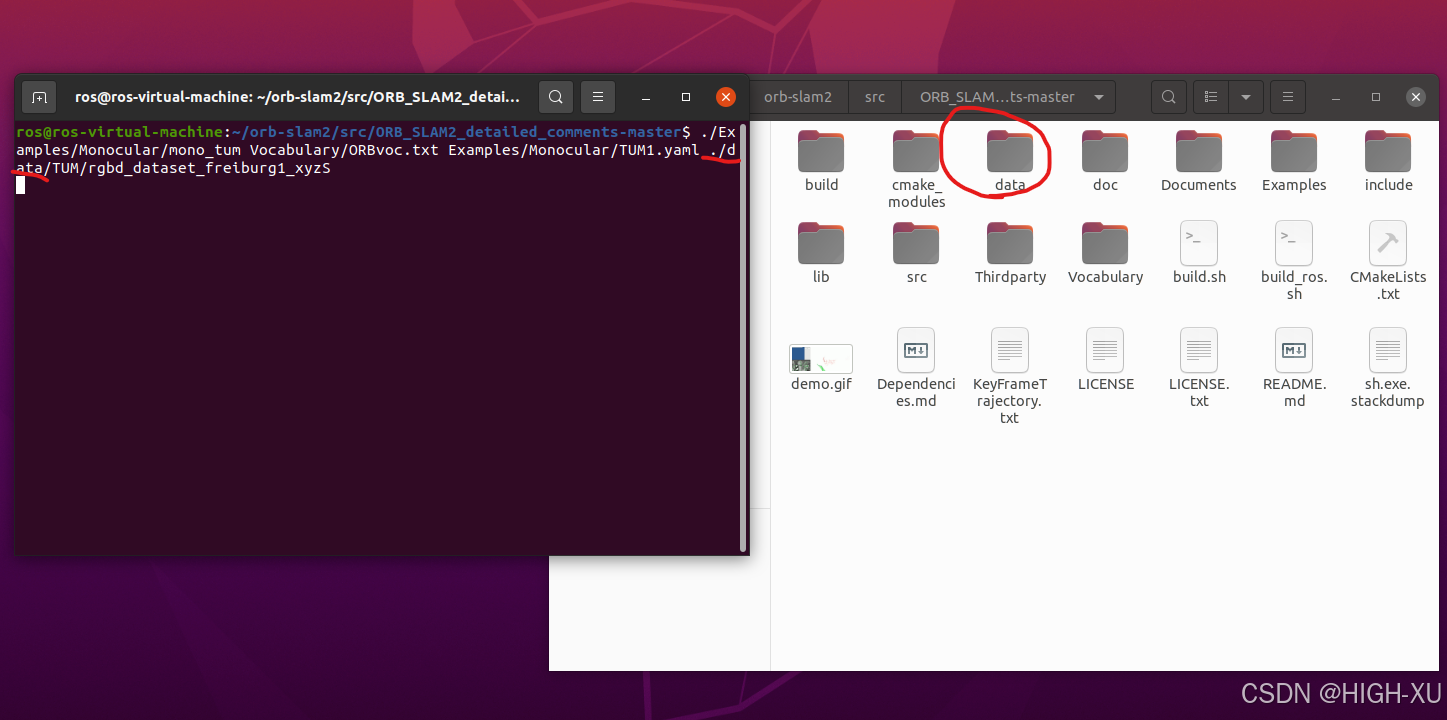
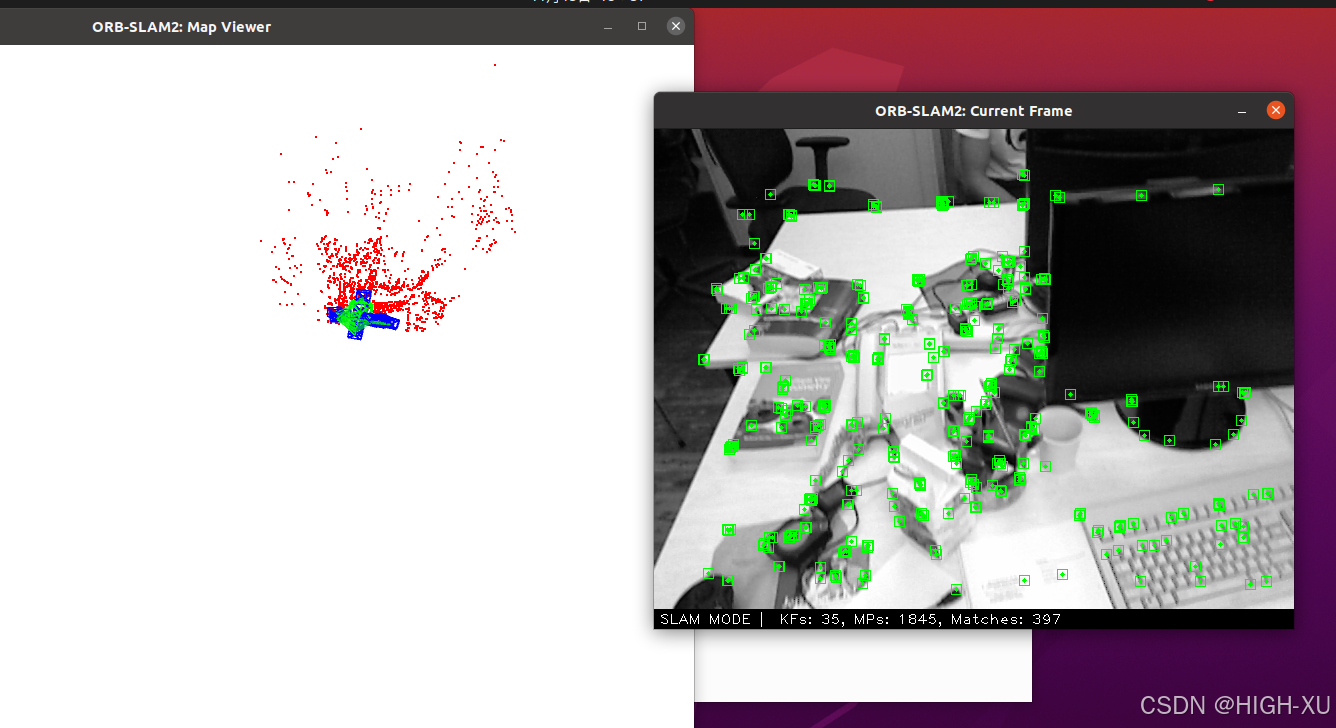
4.跑数据集
可以像我一样新建一个文件,也可以不用。建好后按如下代码编译即可


















 3728
3728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









