







上下料
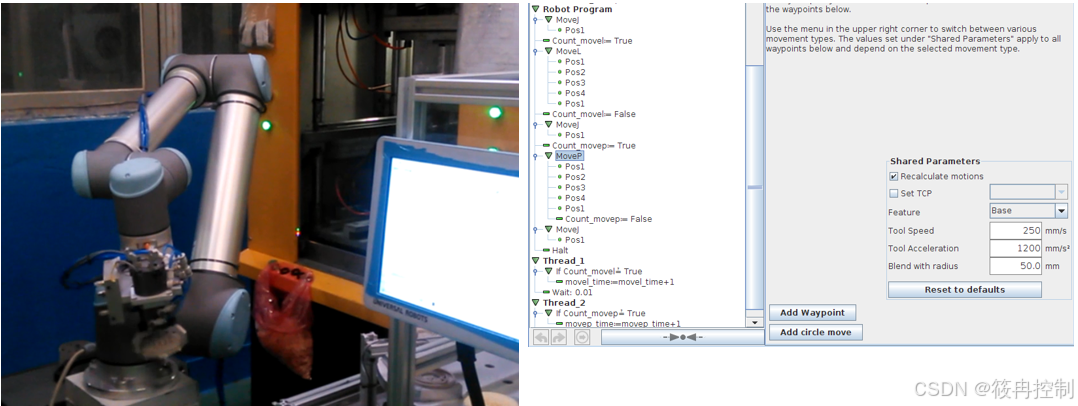
最简单的IO信号一般只需要机器人收到信号之后,从固定位置抓,放到固定位置(一般触发信号由PLC给出,机器人完成了抓放之后,也对PLC输出完成的信号) 这类应用也并非全无难度。一个是调点是个技术活,另一个是往往要求提速,尽可能的减少过渡点,等待点(结合前一章的各种类型运动理解)
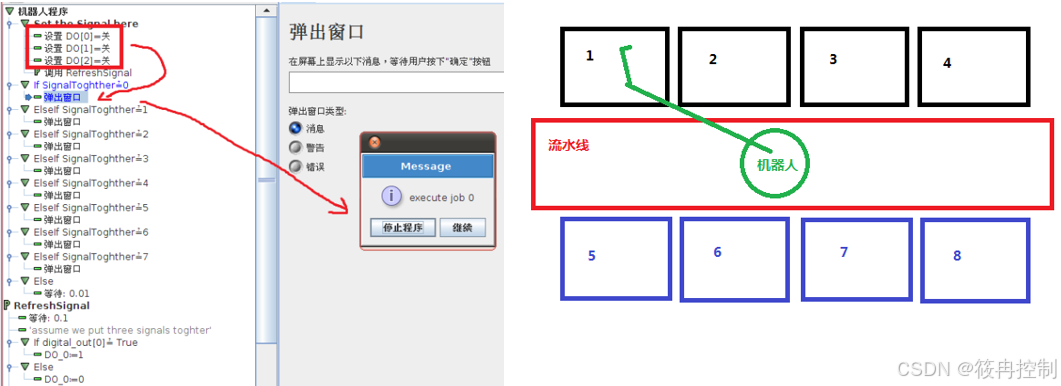
还是上下料,但是信号成组。例如下面,机器人可能从1234的四个工位抓取,放到5678的四个工位,不同的写法,代码量就完全不一样的!!!
涉及到IO信号组的时候,尽可能的简化流程,简化上位机程序,也能显著的减少工作调试量,提高稳定性。 假定有4个取的可能,4个放的可能。如果是取和放流程分开,则只需要8个子程序,如果取和放流程一起,则需要16个子程序(虽然放一起可能工作效率更高)
还是上下料,码垛和卸垛也可以理解为一种简单的取放案例(除了取放点用几层循环得到均匀的点位),除了箱体,也会有机加工件,袋装液体,甚至饼干药丸之类的码垛
 </
</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











