




 本文详细介绍了一个机器人从起点S自主行驶到终点T的路径规划实践案例。通过复习相关专栏链接及参考文献,读者可以了解如何设置目标位置和方向,以及如何进行路径规划。文章提供了起点和终点处的窗口信息,为读者提供了深入理解路径规划过程的机会。
本文详细介绍了一个机器人从起点S自主行驶到终点T的路径规划实践案例。通过复习相关专栏链接及参考文献,读者可以了解如何设置目标位置和方向,以及如何进行路径规划。文章提供了起点和终点处的窗口信息,为读者提供了深入理解路径规划过程的机会。
全文内容来源于国外权威资料汇总整理,具体信息请查阅文末参考文献。
For specific information, please refer to the reference at the end of the article.
在完成前面章节复习和巩固,并阅读完全部参考文献所提供的资料。After we have completed the review and consolidation of the previous chapters, and read the information provided in the references.
我们开始尝试一个完整的实践案例,路径规划!We will try a complete practice case, path planning!
问题描述:Problem Description:
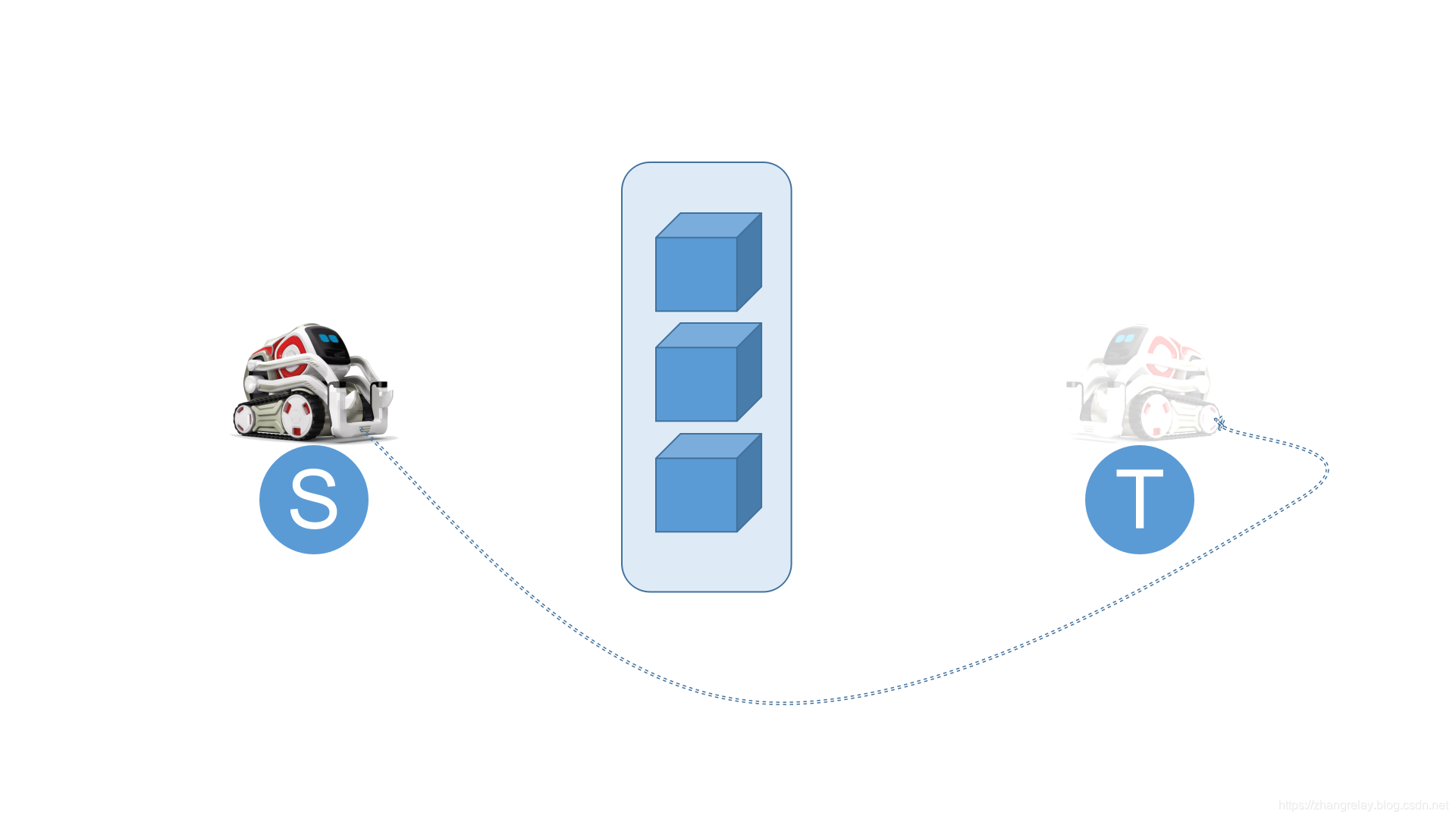
机器人从S点自主行驶到T点。The robot moves autonomously from point S to point T.
如果不清楚如何实现,复习如下专栏链接:
https://zhangrelay.blog.youkuaiyun.com/article/category/7739166
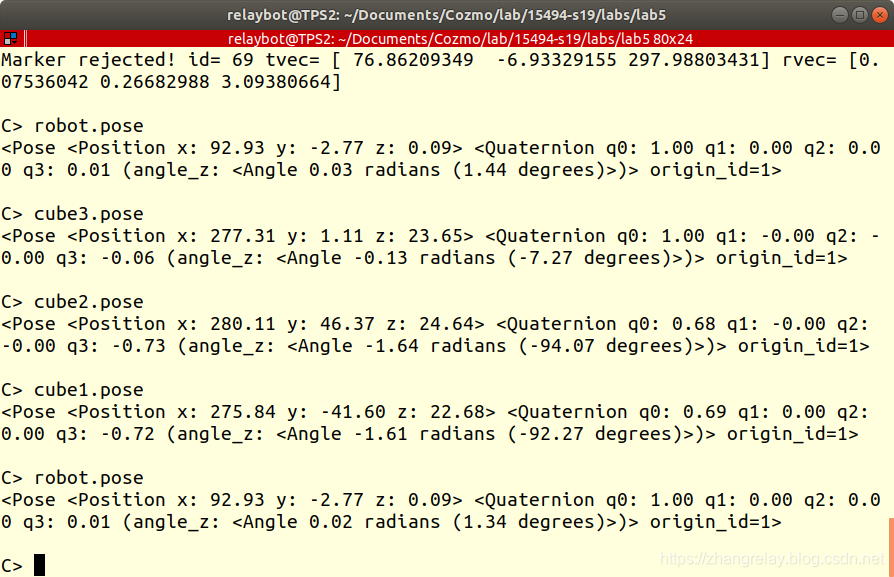
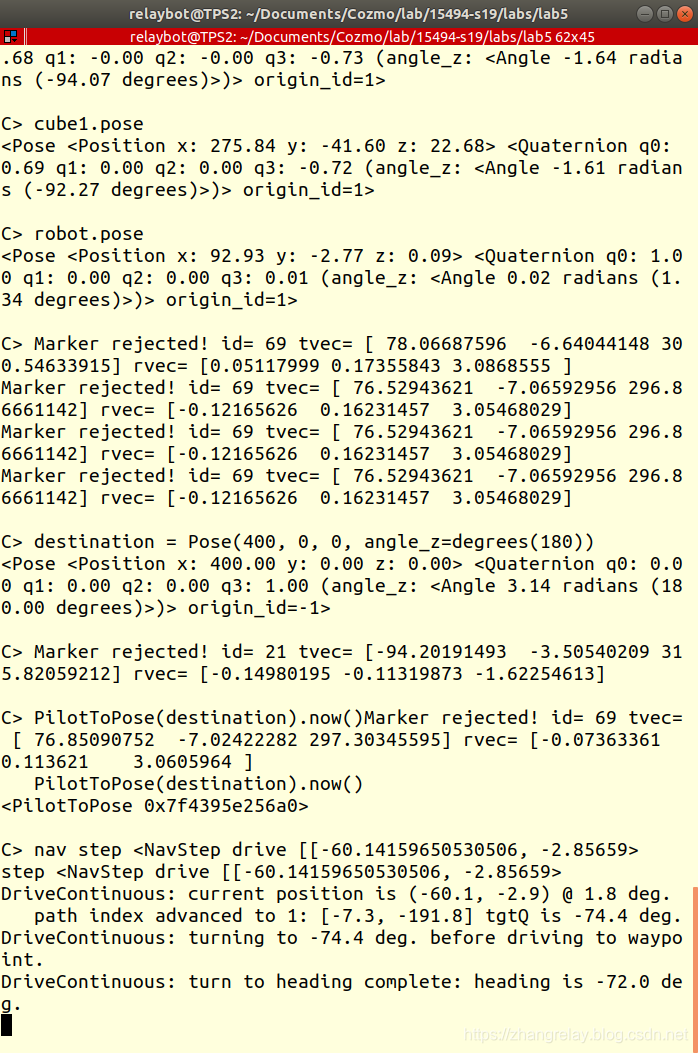
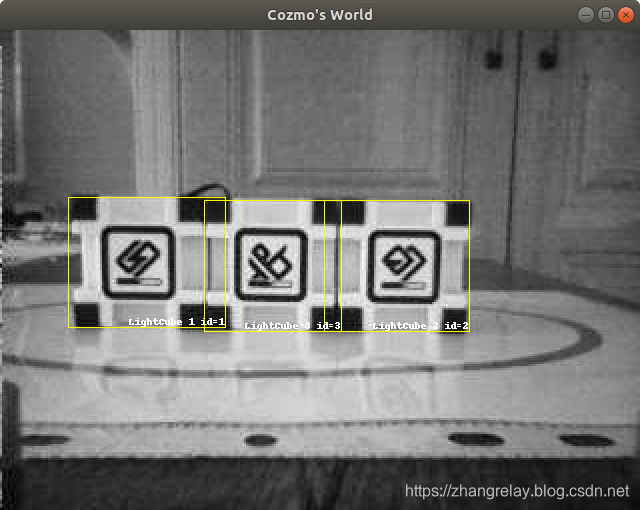
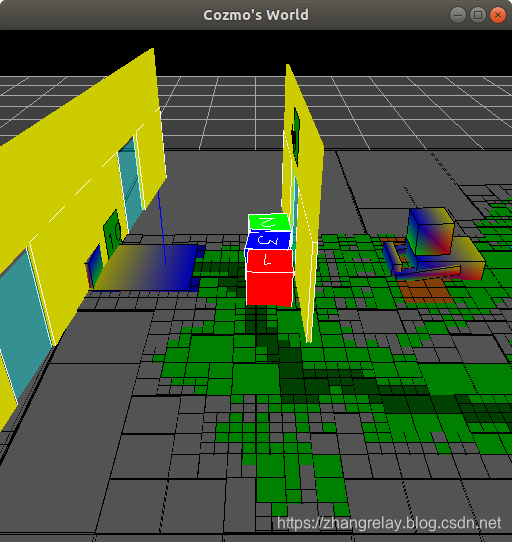
查看机器人和立方体的坐标,并设置目标位置和方向。View the coordinates of the robot and cube and set the target position and orientation.
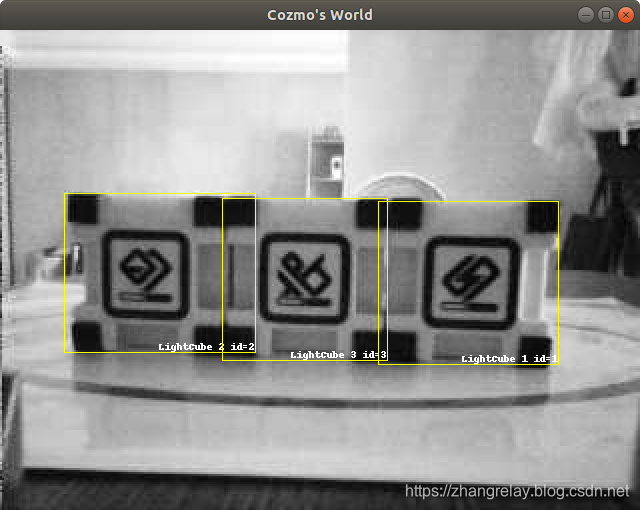
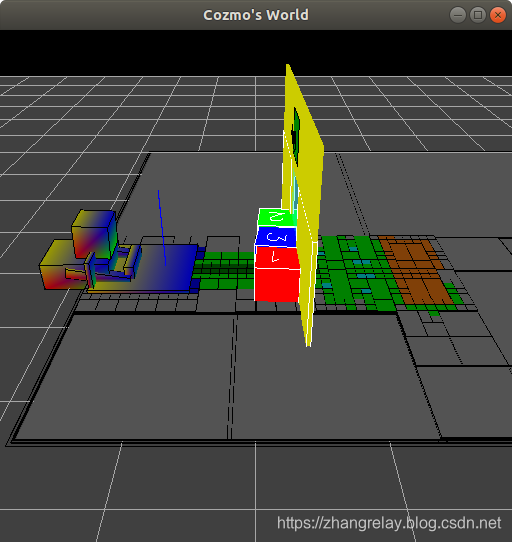
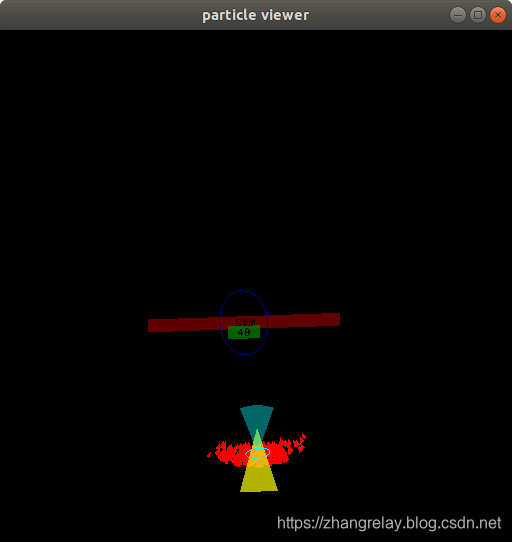
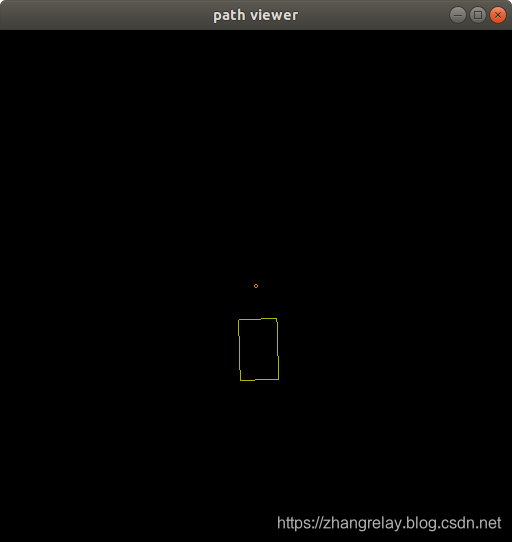
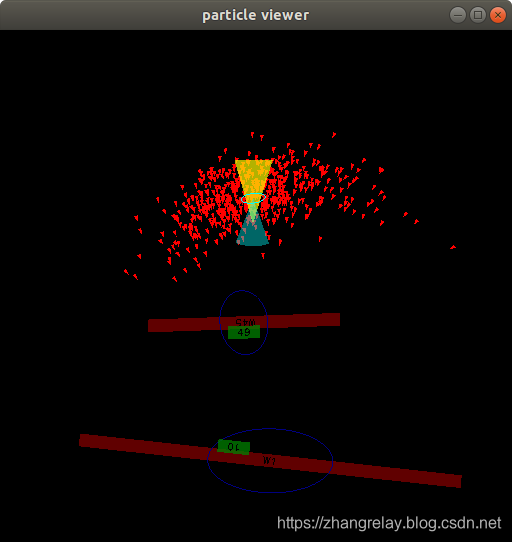
起点处各窗口信息如上。The information of each window at the starting point is as above.
路径规划中。Path planning.
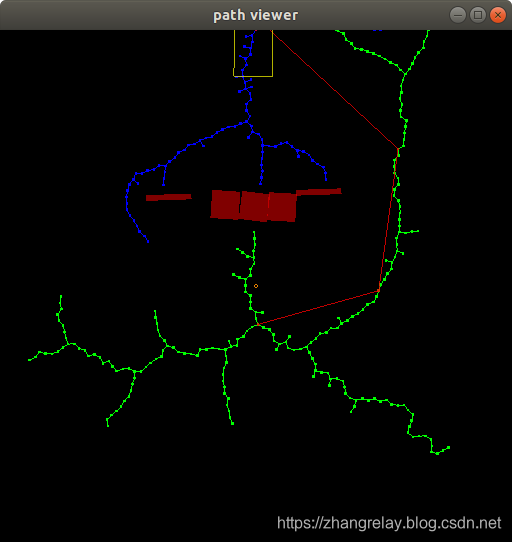
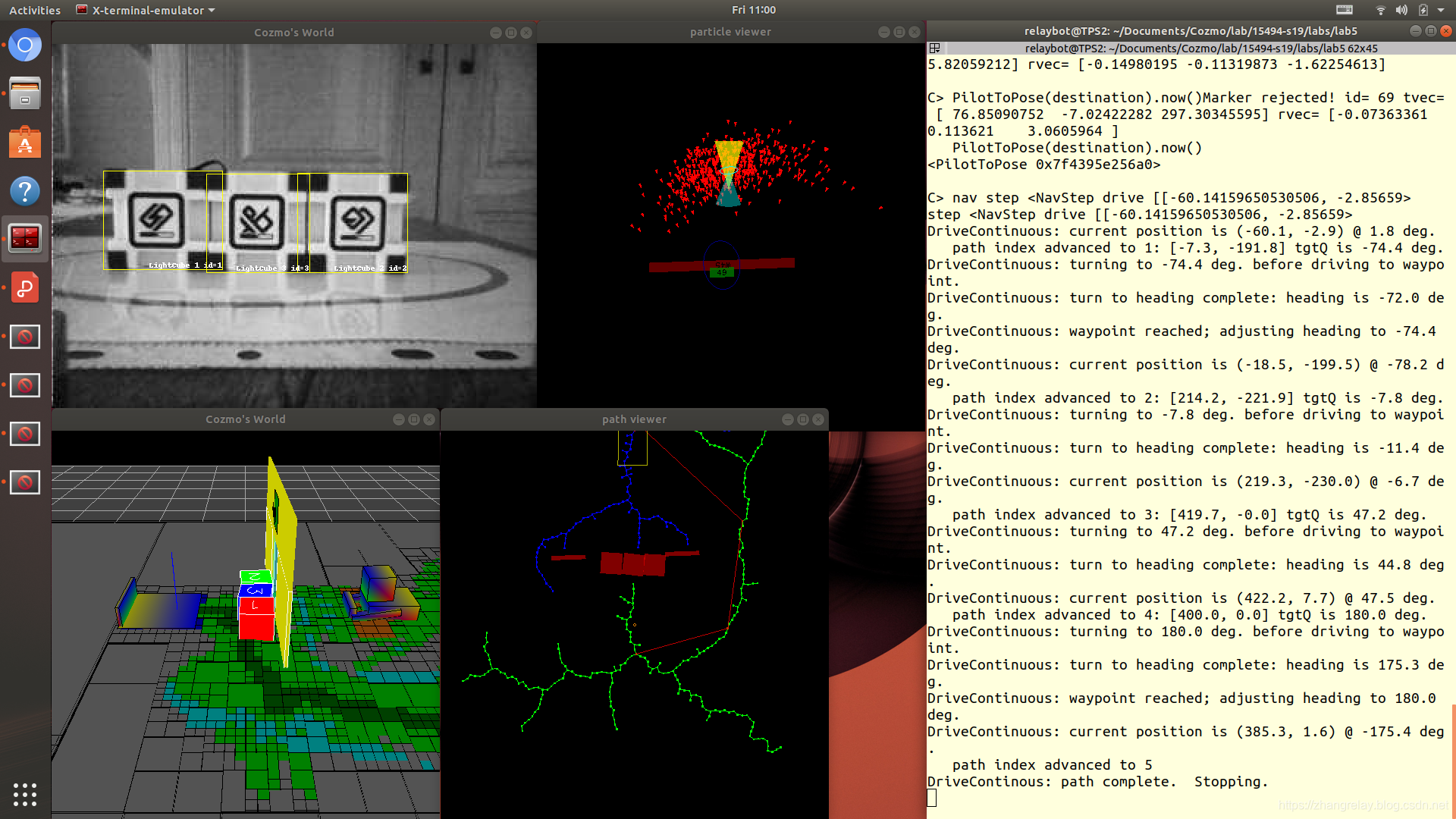
终点处各窗口信息如上。The information of each window at the end point is as above.
持续更新完善,时间标签:2019-07-26。
参考文献references:
Anki文档:http://cozmosdk.anki.com/docs/
cozmopedia:https://github.com/touretzkyds/cozmopedia/wiki
认知机器人学:https://blog.youkuaiyun.com/ZhangRelay/article/details/86736743


















 1019
1019

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











