







1.机器人装配应用价值:
当前机器人装配操作比较成熟的是在结构化环境下,针对特定的任务,采用人工示教的方式使机器人进行重复性的运动。这种应用方式极大地减轻了工人的劳动量,提升了产品质量及产品效率,其实质等价于高自由度机床。
2.机器人装配过程:
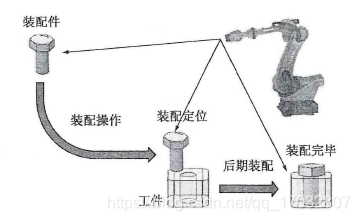
机器人装配过程分为:装配操作和后期装配两部分。
其中,装配操作指机器人使装配件定位到工件的操作过程(较大发展空间);后期装配指的是装配件和工件定位完毕后进行传感器引导装配的过程(成熟);其过程如图1所示:
3.机器人操作规划:
机器人操作规划分为:低层规划和高层规划两部分。
其中,低层规划主要指的机器人轨迹规划;高层规划主要指的机器人运动规划;
4.当前机器人装配中较为主要的问题
a.机器人高度运动时会发生机身抖动,同时奇异区间会导致机器人运动不连续也会导致机器人抖动(低层规划);
b.笛卡尔空间下双机协作目前缺乏优化方式(低层规划);
c.机器人自主装配时受环境影响大,容易无法识别目标(高层规划);
5.一般机器人轨迹规划的工程过程:
机器人n个目标位姿 -> 插补得到中间位姿 -> 逆运动学求解 -> 各关节目标值 -> 关节位置控制 -> 机器人运动。
7.机器人轨迹规划(低层规划):
机器人轨迹规划技术比较成熟,主要分为笛卡尔空间轨迹规划和关节空间轨迹规划两类。
其中,笛卡尔轨迹规划的规划目标:机器人末端、优点:直观、缺点:计算量大,容易遇到奇异点;关节轨迹规划的规划目标:机器人关节、优点:操作简单、不存在奇异性(由于关节空间和笛卡尔空间的非连续映射,可以通过调整关节曲线避免)、缺点,无法精确控制机器人末端;
8.机器人运动规划(高层规划):
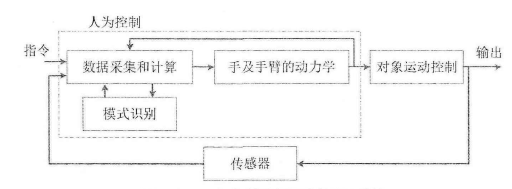
从发展学习的角度,人工智能控制系统(机器人运动规划的主要部分)可以分为:1)人为控制器的控制系统(人);2)人-机结合作为控制器的控制系统(人-机);3)无人参与的智能控制系统(自主)。
其中,人为控制为最原始的控制方式,实际上就是手动控制,机器人只是作为人能力的扩展和延申,其系统框架如图2所示:
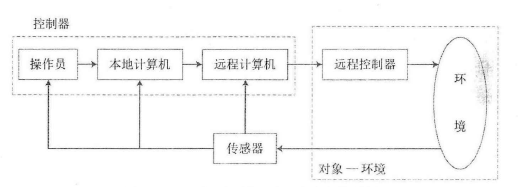
人机结合控制比人为控制拥有更强的智能型,计算机完成常规任务而人则完成上层的决策任务,其系统框图如图3所示:
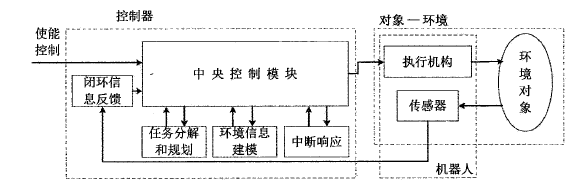
而自主运动规划则不需要人参与,其计算机系统可以自主完成:任务分解、环境信息建模、传感信息整合以及中断反应四个任务,其系统框图如图4所示:
9. 常用机器人运动学欧氏矩阵
假设四个机器人参数决定了旋转关节机器人坐标系{i}和坐标系{i-1}之间的位姿关系,则欧式变换矩阵可以表示为:
10.机器人雅可比矩阵
机器人雅可比矩阵是连接机器人关节速度的状态向量(关节空间)和机器人末端速度的状态向量(笛卡尔空间)的系数矩阵(微分运动的表现),记为,这是一个随着时间变化的矩阵,其定义为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









