



 ROS1的Windows开发团队近期更新了多个功能包至20181224.1版本,包括桌面版、全功能版及Cartographer ROS等,通过一系列bat文件设置,实现了Turtlebot3在Gazebo中的Cartographer Demo启动。
ROS1的Windows开发团队近期更新了多个功能包至20181224.1版本,包括桌面版、全功能版及Cartographer ROS等,通过一系列bat文件设置,实现了Turtlebot3在Gazebo中的Cartographer Demo启动。
最近ROS1的windows开发团队更新和完善了功能,目前最新版本是20181224.1。



分别升级如下功能包:
choco upgrade ros-melodic-desktop -y
choco upgrade ros-melodic-desktop_full -y
choco upgrade ros-melodic-cartographer_ros -y
c:\opt\ros\melodic\x64\setup.bat
c:\ros_ws\turtlebot3\install\setup.bat
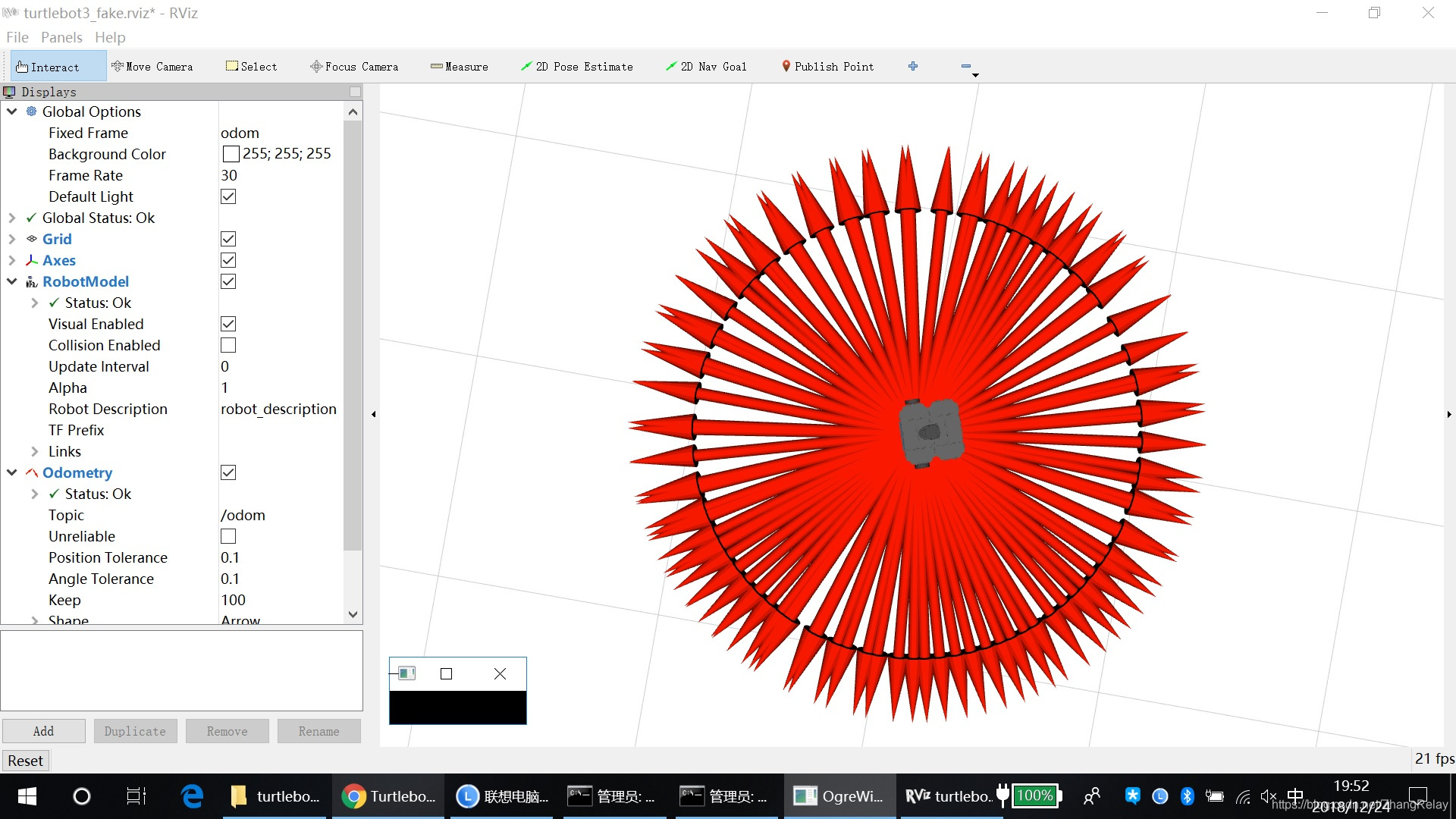
set TURTLEBOT3_MODEL=waffle
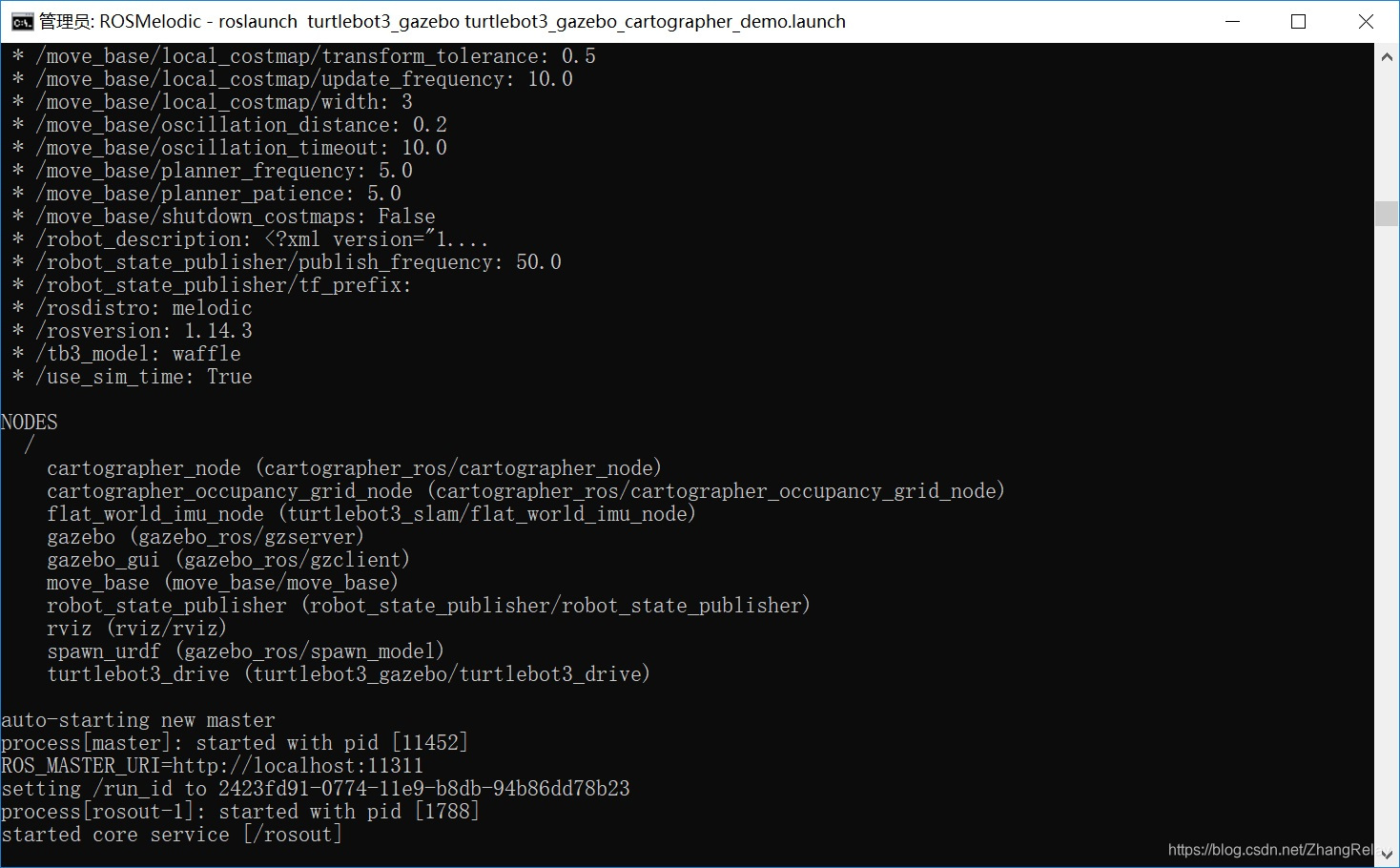
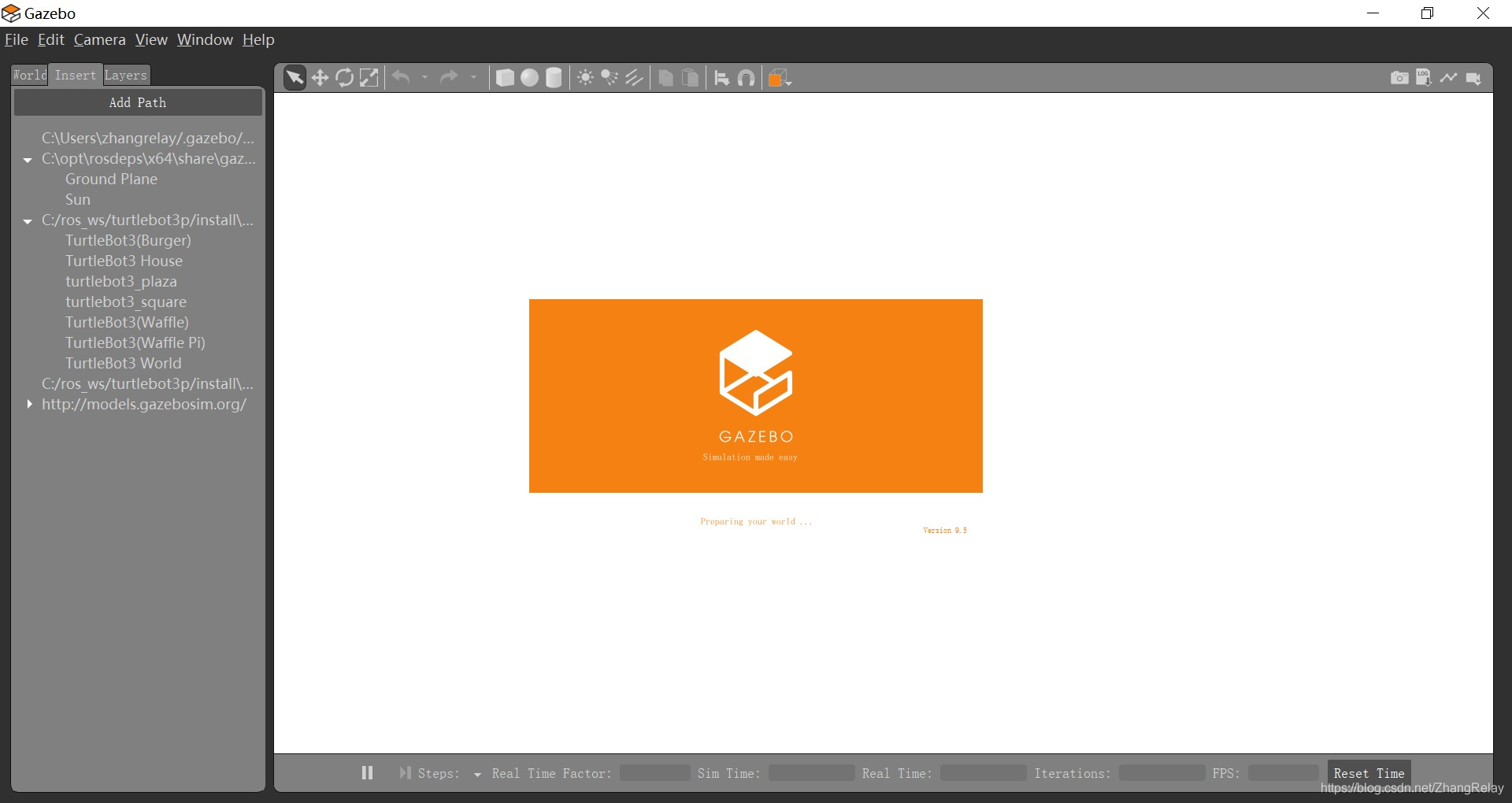
roslaunch turtlebot3_gazebo turtlebot3_gazebo_cartographer_demo.launch

















 1172
1172





 到【灌水乐园】发言
到【灌水乐园】发言







