




 一位拥有九年工作经验的机器人专业讲师分享了其面对的工作压力、不断学习的经历和参加各类竞赛的历程。尽管面临重重困难,如高强度工作、成绩不理想,但讲师仍然坚持自我提升,参加超过一千场讲座。文中强调了在竞争激烈的环境中,即使成绩优秀也可能无法脱颖而出,而个人成长的重要性在于超越不断提升的社会要求。
一位拥有九年工作经验的机器人专业讲师分享了其面对的工作压力、不断学习的经历和参加各类竞赛的历程。尽管面临重重困难,如高强度工作、成绩不理想,但讲师仍然坚持自我提升,参加超过一千场讲座。文中强调了在竞争激烈的环境中,即使成绩优秀也可能无法脱颖而出,而个人成长的重要性在于超越不断提升的社会要求。
如何提高机器人专业课讲师的收入
这篇是关于为何收入水平低,以及如何提高自身收入的一些总结。
机器人学习的坚持与收获-2023
这篇是学生如何成长的一些案例。
工作九年,发现工作压力越来越大,工作任务越来越重,很多时间特别疲惫,全年无休。
但依然需要坚持学习,参加各类竞赛等,虽然成绩都非常稀烂,也就是参与奖,但是一次次坚持不懈的努力着。
// C++ program of life
#include <iostream>
using namespace std;
// Driver Code
int main()
{
// An array of size 80 按人均年龄80
int Success[80] = { 0 };
int Failed[80] = { 0 };
for(int i=0;i<80;i++)
{
cin >> Failed[i];
if(Failed[i]==1)
{
Success[i]=0;
}
else if(Failed[i]==0)
{
Success[i]=1;
}
}
// 但不管如何,一旦i到80;
cout << "Game Over, The end of life!!!"
return 0;
}
这里举一个例子吧。
2021-2022参加了一个线上教师培训项目:
参加的目标就是认真学习,毕竟自己所有的教学努力,毫无意外的全部以失败告终。
个人工作能力非常差,教学水平非常低,自己一定要努力寻求突破才行。
只有个人不断的成长,才有可能(并非一定)跳出一次次失败的轮回,九年辛劳,一败涂地,内心也是无比煎熬的。

每一次讲座都认真听,这只是听讲的一小部分,参加各类讲座学习总量是超过一千场的,也都做了记录,具体是1064场讲座,包括机器人相关,也有高校教学和科研相关的。(学校学院安排任务除外,个人努力去参加的讲座,如果包含学校学院那就更多了)
如上截图只是参加过的非常小的一个比例。
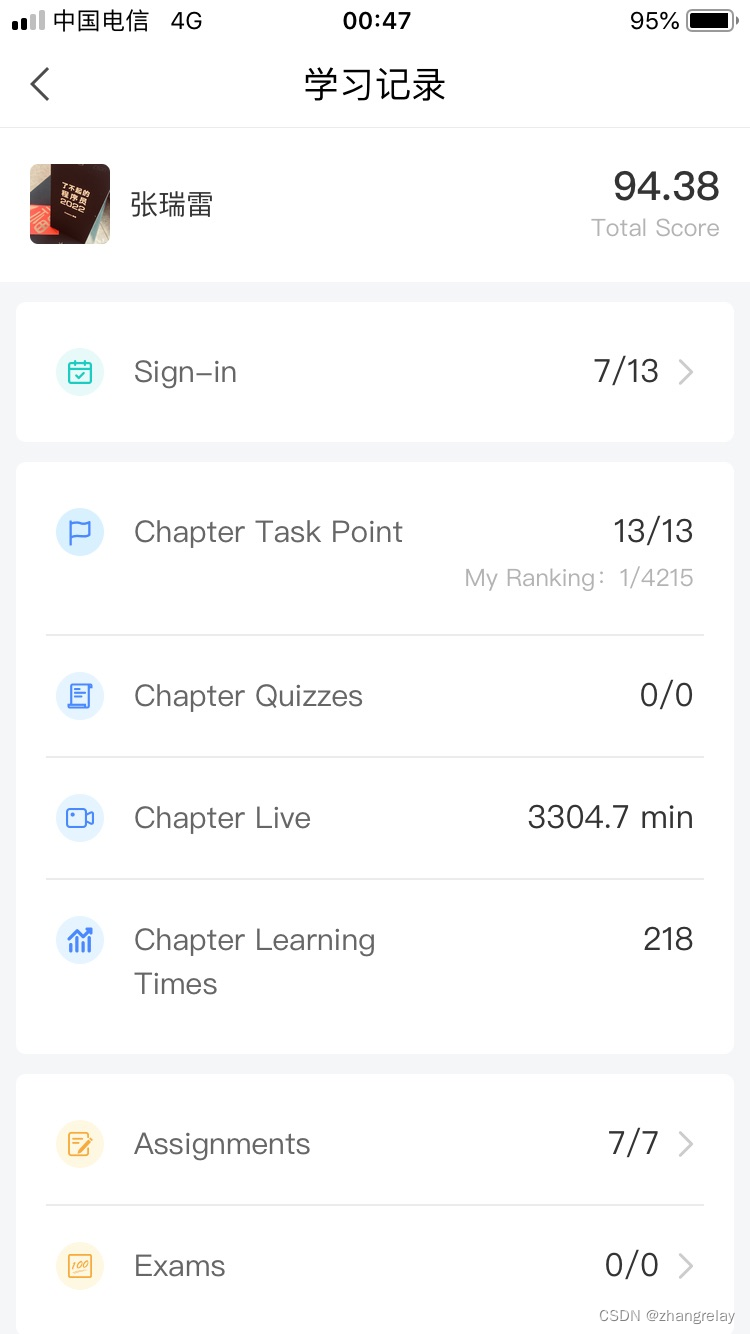
积极参与并争取拿优秀,课程参与详细数据如下:
第八季
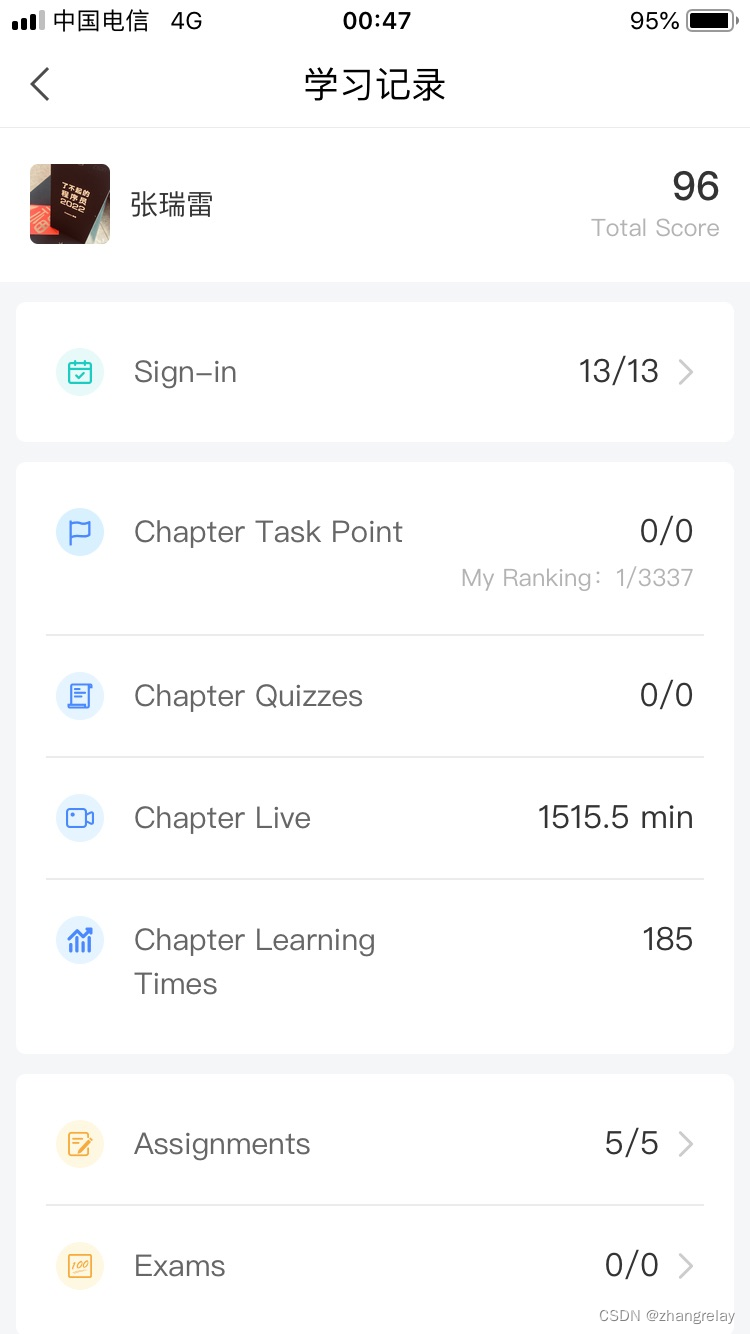
第九季
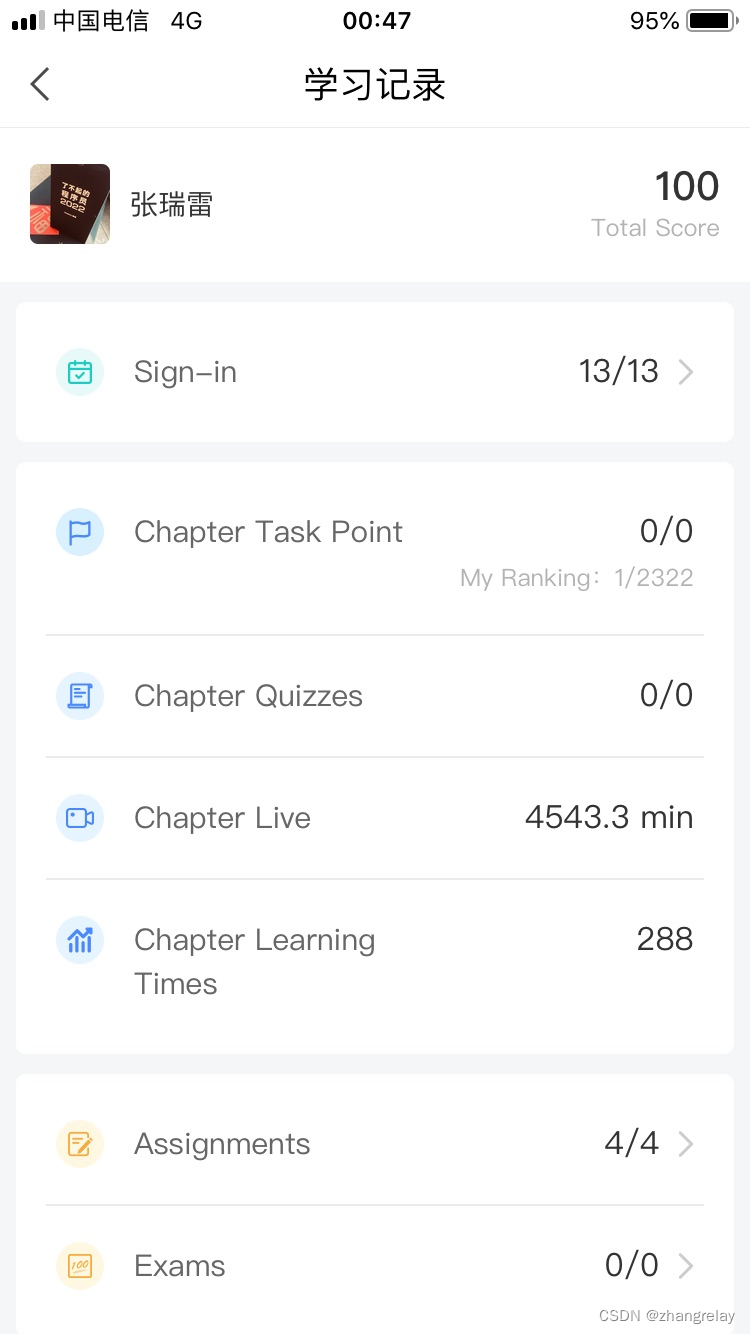
第十季
原本以为第八季,都94分了,肯定能得到优秀,其实没有。
然后96分,还是没有。
坚持不放弃,最终100分,终于拿到优秀了。
其实很多人,有些失败一次就放弃了,有些失败二次就放弃了,我九年工作年年失败,一事无成,不也还在坚持, 只有坚持,才有那么一丝丝成功的希望。
这里面感悟就是竞争太激烈了。
原本以为90分就行,其实如果参与人数达到1万+:
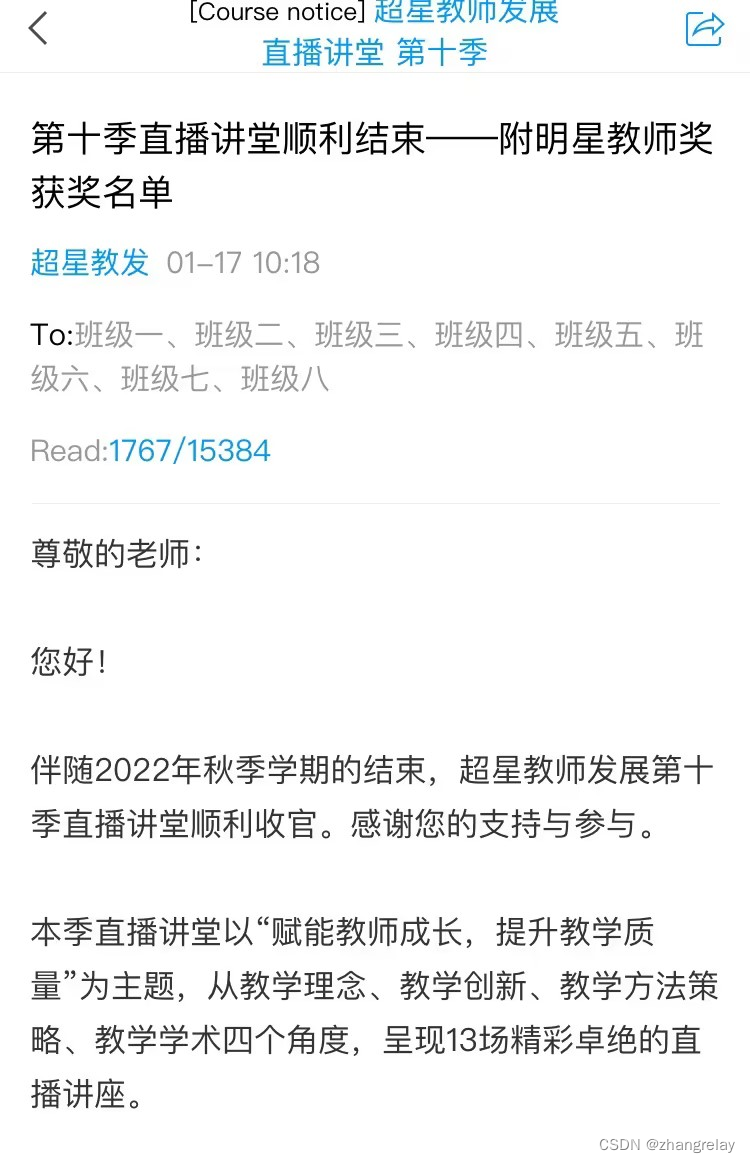
统计总人数具体是15384人。优秀只有10人……
之前每一期讲座都收获非常大,但是只能得到如下证书:



只能拿到合格证书,如果没有拿到优秀就算失败,拿到优秀的标准是非常高的。
其实参加各类竞赛也是一样,只有10个特等一等奖,参加老师数千人。
卷中卷无疑了。
连续参加3次,才获得了如下证书,课程成绩是100,才有希望。

这个案例分享后,个人总结就是:
成绩重要性远没有排名直观。
举例说明,都是59分,60分就是超赞的。
如果都是99分,那么100分也就那么回事。
卷就是这个意思,大部分学生确实成长很大,但是社会要求更高。
老师个人成长也是持续的,实验室也越来越好,但是竞争者越多,要求也逐年大幅度提升。
当要求的提升大于个人成长能力极限的临界值之后。
个人所有的努力都会以失败告终,于是乎终于明白对于普通人而言原来失败是一种必然,命运早就安排好了。


















 932
932

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











