



 本文围绕ROS2展开,介绍了树莓派4的实时性内核镜像,内置ROS 2和实时内核,测试时延大部分小于50us。还提及SMACC2事件驱动库用于ROS2应用程序,以及Real2Sim_gazebo模拟、ROS2基准测试等内容,最后介绍了在AWS RoboMaker上使用Isaac Sim的相关情况。
本文围绕ROS2展开,介绍了树莓派4的实时性内核镜像,内置ROS 2和实时内核,测试时延大部分小于50us。还提及SMACC2事件驱动库用于ROS2应用程序,以及Real2Sim_gazebo模拟、ROS2基准测试等内容,最后介绍了在AWS RoboMaker上使用Isaac Sim的相关情况。
树莓派4的实时性内核镜像:
github.com/ros-realtime/ros-realtime-rpi4-image/releases
或者github的ros-realtime查看更多资料。
ROS实时工作组已经开发了一个Raspberry Pi 4映像,内置了ROS 2和实时内核。
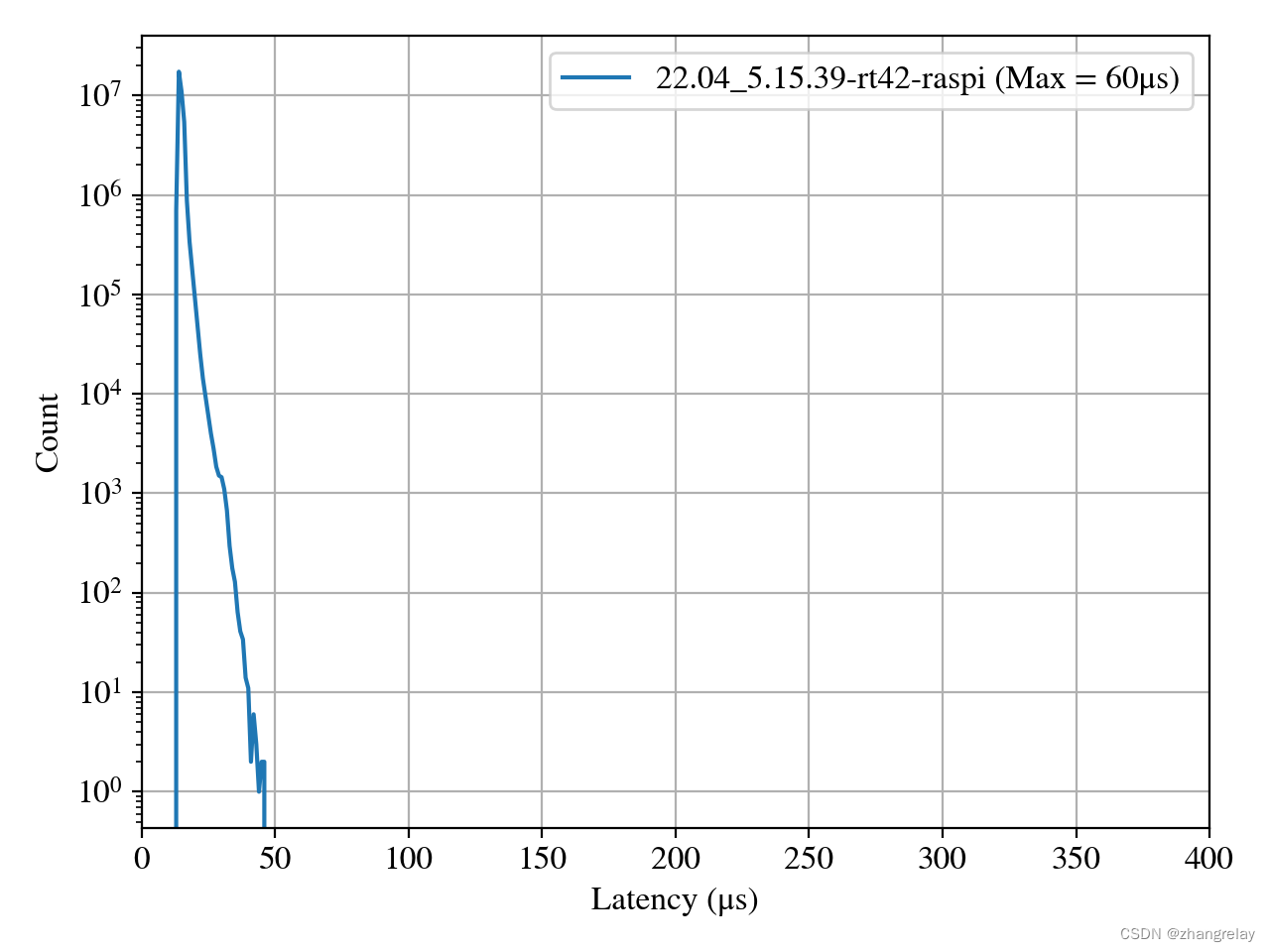
测试时延大部分小于50us。
实时工作组的任务是倡导并致力于内存管理、实时发布/订阅、实时DDS以及支持跟踪、分析和优化的工具。
(⊙﹏⊙)
SMACC2
SMACC2是一个事件驱动的异步行为状态机库,用于用C++编写的实时ROS2(机器人操作系统)应用程序,旨在允许程序员以直观和系统的方式为多组件机器人构建机器人控制应用程序。
SMACC的灵感来自Harel的statecharts和SMACH ROS包。SMACC构建在Boost StateChart库之上。
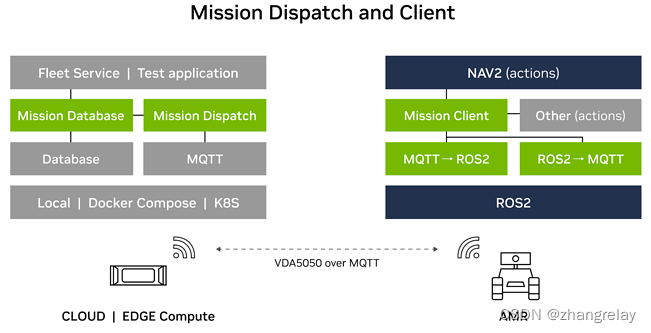
云原生+ 边缘系统+……

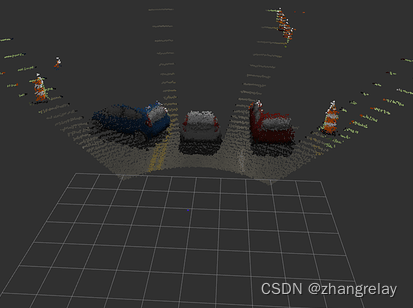
Real2Sim_gazebo:逼真的Velodyne64E模拟
汽车行业AD/ADAS仿真的主要问题之一是仿真过于理想化,与现实相差甚远,并且在不同的ADAS系统中存在伪像表示,此外,很难将此类仿真纳入虚拟验证周期,如虚拟SIL或虚拟HIL。
有趣的海报:
神奇的MCAP:
一本小册子:

accelerationrobotics.com/pdf/hardware_acceleration_robotics_2022.pdf
ROS2基准测试:
一种架构中立、有代表性和可复制的方式,展示ROS系统解决方案的性能证据。
基准测试是运行计算机程序来评估其相对性能的行为。在ROS 2的背景下,性能信息可以帮助机器人专家设计更高效的机器人系统,并为其机器人应用选择正确的硬件。它还可以帮助理解实现相同功能的不同算法之间的权衡,并帮助他们选择适合其用例的最佳方法。性能数据也可以用来比较不同版本的ROS 2和确定回归。最后,性能信息可以用来帮助确定未来开发工作的优先级。 机器人硬件和机器人软件的无数组合使得以架构中立、有代表性和可重复的方式评估机器人系统的性能具有挑战性。该报告试图提供一些指导方针,帮助机器人专家通过遵循定量方法,以一致和可重复的方式对他们的系统进行基准测试。该报告还提供了一套工具和示例,帮助机器人专家收集和报告性能数据。
在AWS RoboMaker Workshop上运行NVIDIA Isaac Sim
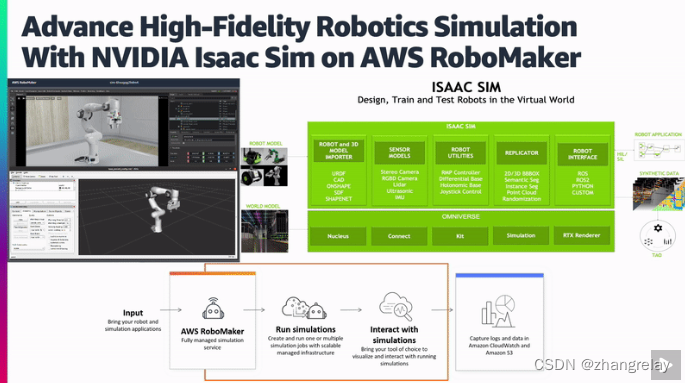
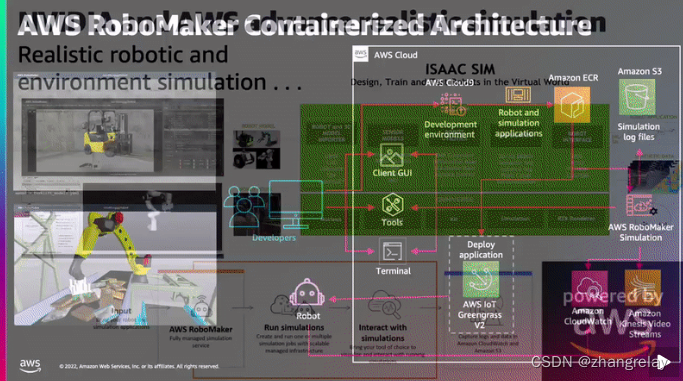
了解如何在AWS RoboMaker上使用Isaac Sim,并通过基于云的模拟转变机器人软件开发和验证,以提高可扩展性、协作性和可访问性。


















 1505
1505

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











