



 本文介绍了使用ROS(Robot Operating System)进行基础操作,如turtlesim示例中的贪吃蛇游戏,以及利用plotjuggler进行数据可视化路径跟踪。通过实践步骤和关键命令演示,带你逐步掌握ROS环境下的移动与路径规划技巧。
本文介绍了使用ROS(Robot Operating System)进行基础操作,如turtlesim示例中的贪吃蛇游戏,以及利用plotjuggler进行数据可视化路径跟踪。通过实践步骤和关键命令演示,带你逐步掌握ROS环境下的移动与路径规划技巧。
需要预备如下基础:
使用功能包为:
后续会补充stdr案例(ROS小课堂出品)。
~ www.corvin.cn/561.html ~
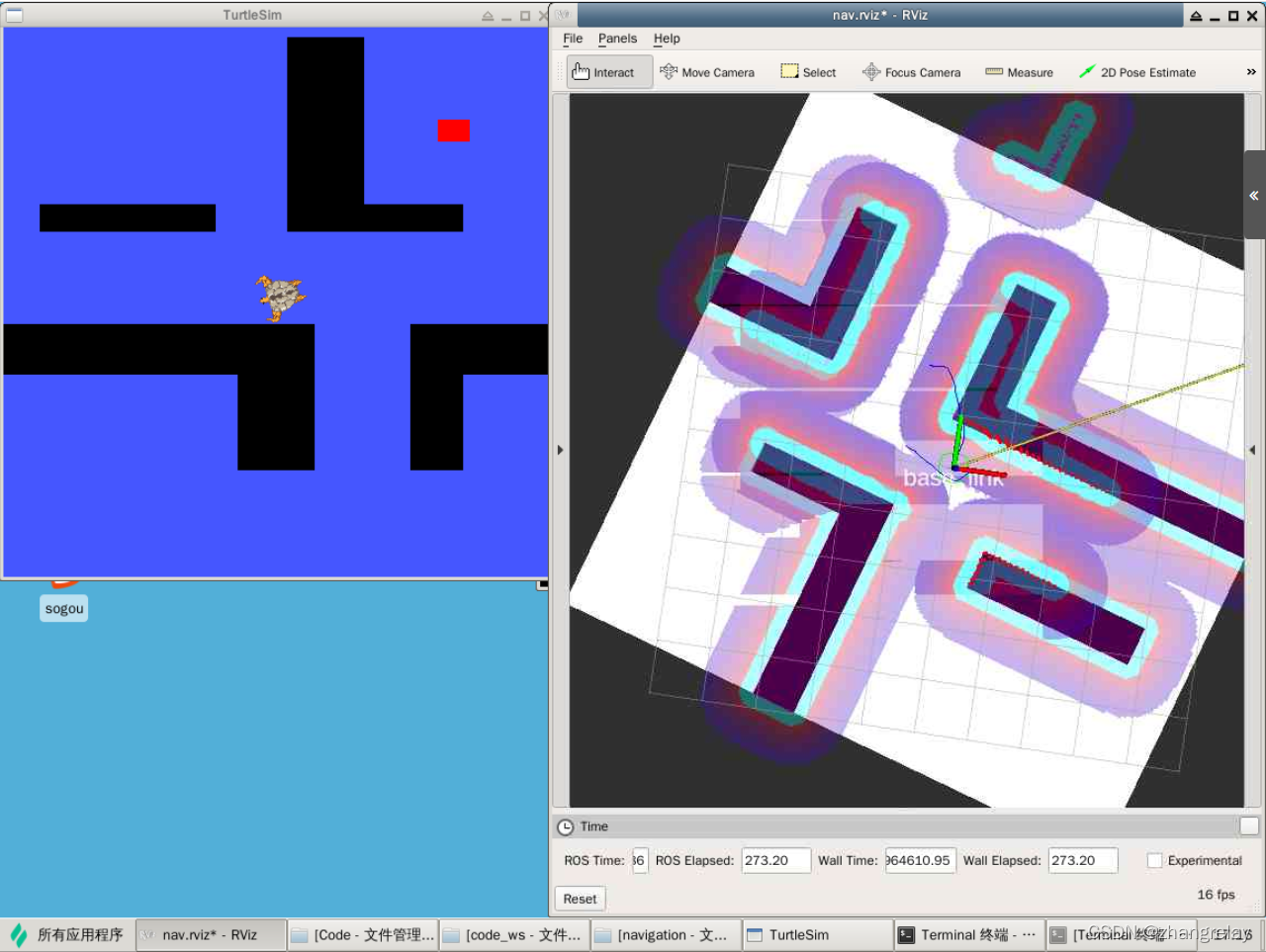
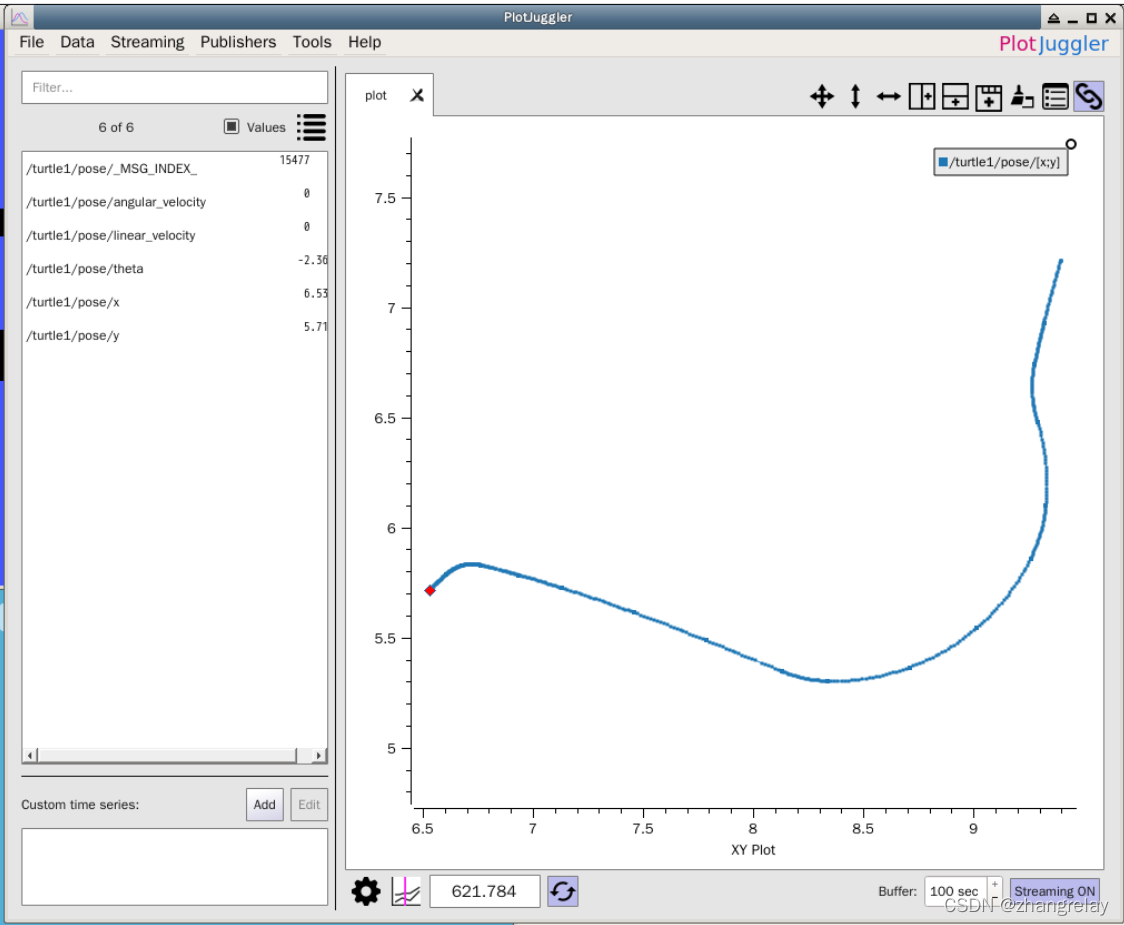
使用plotjuggler
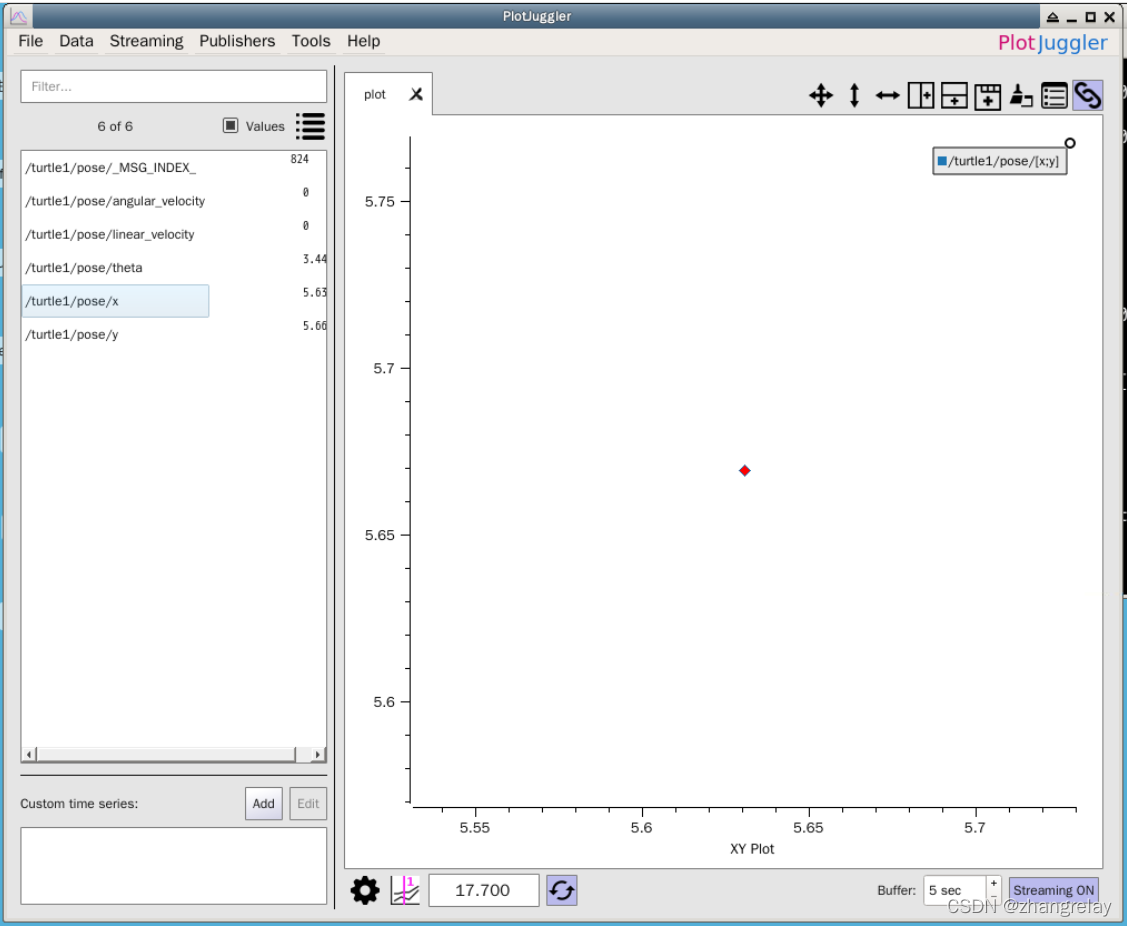
专业出图工具,路径一目了然。
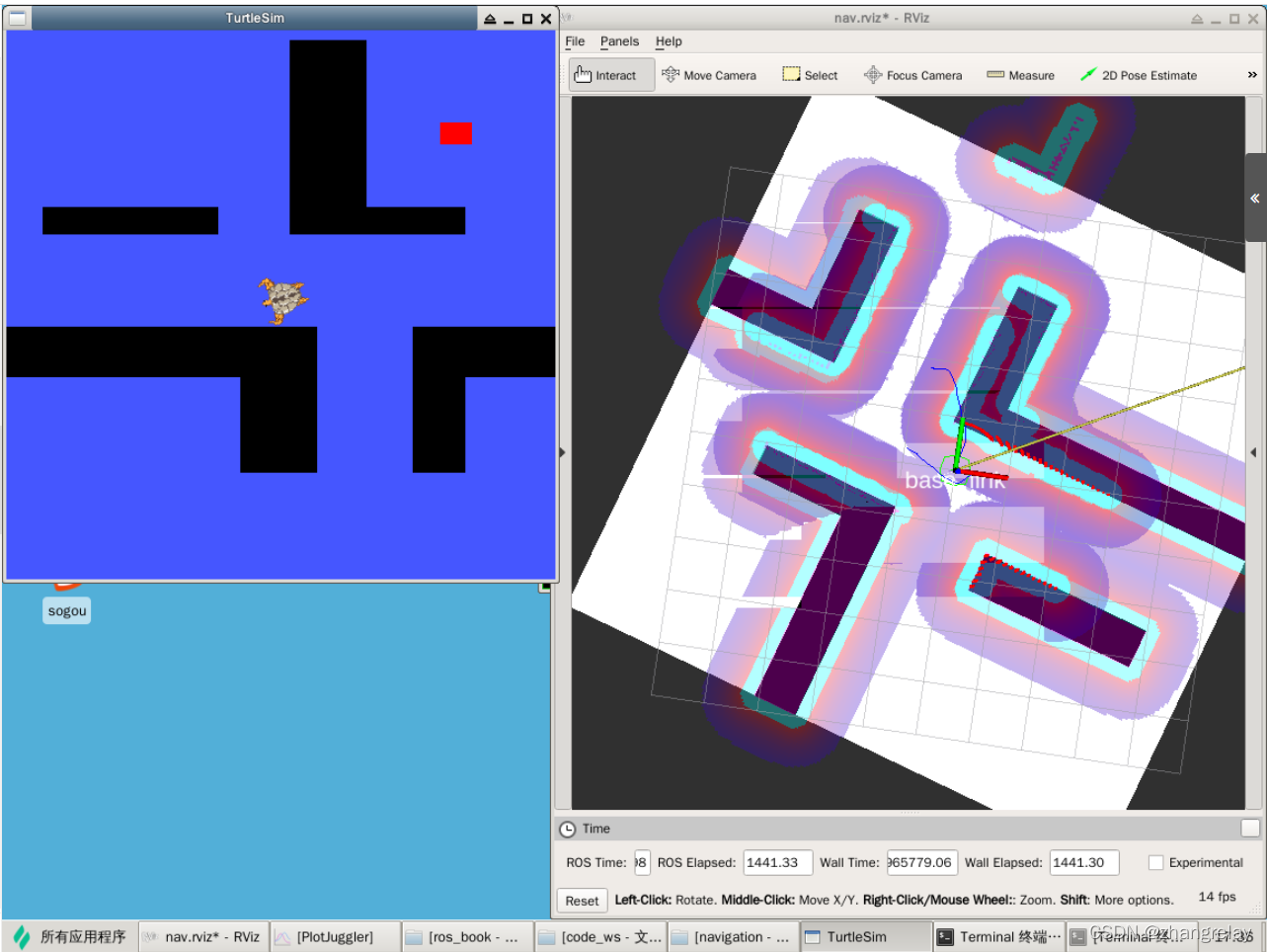
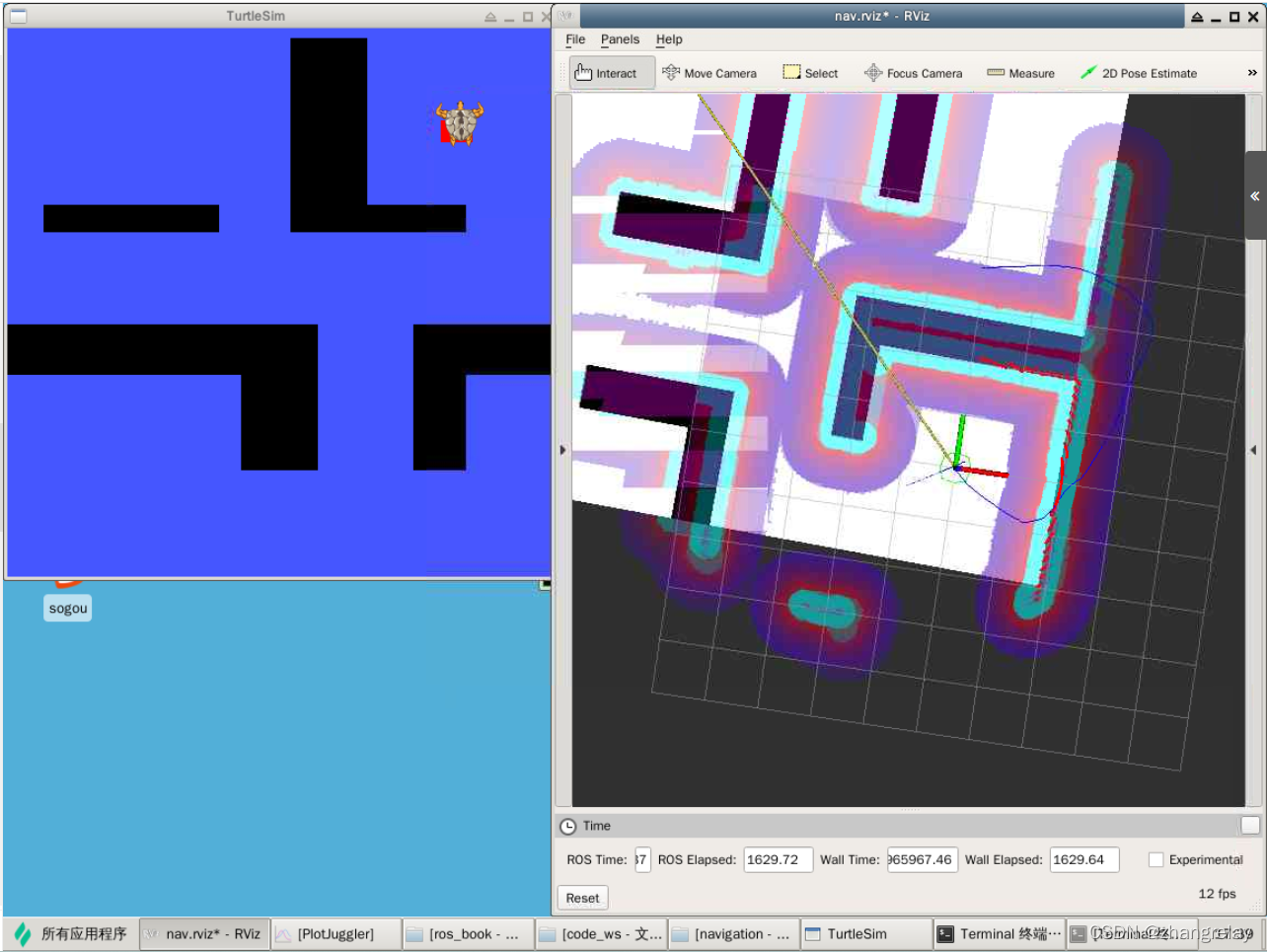
移动到红色位置!
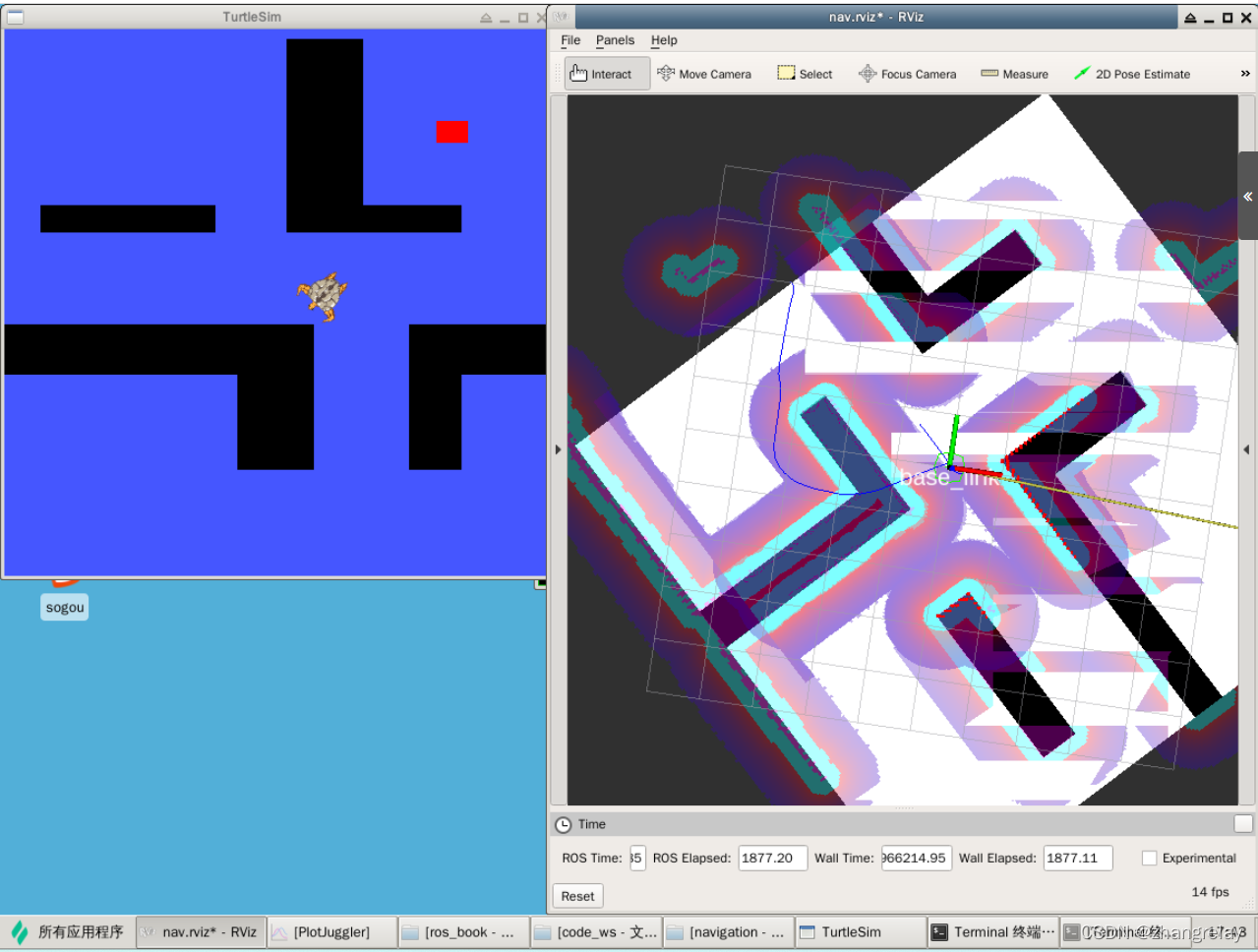
再回到中心:
曲线图如下:
部分命令如下:
shiyanlou:~/ $ history [17:45:05]
1 unzip turtlesim_examples.zip
2 cd code_ws
3 catkin_make
4 source devel/setup.bash
5 source devel/setup.zsh
6 roslaunch turtlesim_examples draw.launch
7 roslaunch turtlesim_examples bumber.launch
8 rostopic list
9 rostopic echo /bumber
10 roslaunch turtlesim_examples laser.launch
11 source devel/setup.zsh
12 roslaunch turtlesim_examples moveBase.launch
13 git clone https://gitcode.net/ZhangRelay/ros_book.git
14 ls
15 cd ros_book
16 ls
17 unzip navigation-kinetic-devel.zip
18 catkin_make
19 sudo apt-key add ros.asc
20 sudo apt update
21 sudo apt install ros-kinetic-move-base
22 source devel/setup.zsh
23 roslaunch turtlesim_examples laser.launch
24 sudo apt install ros-kinetic-map-server
25 catkin_make
26 roslaunch turtlesim_examples laser.launch
27 source devel/setup.zsh
28 roslaunch turtlesim_examples moveBase.launch
29 sudo apt install ros-kinetic-plotjuggler
30 rosrun plotjuggler PlotJuggler
shiyanlou:~/ $ [17:45:10]
更多案例后续补充:


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











