



 本文指导初学者通过C++实现用户输入两个数字并进行加减运算,介绍了变量、数据类型、初始化、赋值和基本算术操作。
本文指导初学者通过C++实现用户输入两个数字并进行加减运算,介绍了变量、数据类型、初始化、赋值和基本算术操作。
语句是一种使程序执行某些操作的指令。语句通常以分号结束。
函数是按顺序执行的语句的集合。每个 C++ 程序都必须包含一个名为main的特殊函数。当运行程序时,执行从main函数的顶部开始。
控制 C++ 语言元素如何构造的规则称为语法。当违反语言的语法规则时,就会发生语法错误。
注释允许程序员在代码中留下注释。C++ 支持两种类型的注释。行注释以 a 开头//并运行到行尾。块注释以 a 开头/*并转到配对*/符号。不要嵌套评论。
可以使用注释来临时禁用代码行或代码段。这称为注释掉代码。
数据是可以被解释为表示某种含义的任何符号序列。存储在内存某处的单个数据称为值。
变量是一块命名的内存,我们可以用它来存储值。变量的名称称为标识符。为了创建变量,我们使用称为定义语句的语句。当程序运行时,每个定义的变量都会被实例化,这意味着它被分配了一个内存地址。
数据类型告诉编译器如何将一段数据解释为有意义的值。整数是可以写成没有小数部分的数字,例如4、27、0、-2 或 -12。
复制赋值(通过 operator=)可用于为已创建的变量赋值。
初始化可用于在创建时为变量赋值。C++ 支持 3 种类型的初始化:复制初始化、直接初始化和统一初始化(也称为列表初始化或大括号初始化)。
应该更喜欢统一初始化而不是其他初始化形式,并且更喜欢初始化而不是赋值。
尽管可以在单个语句中定义多个变量,但最好在单独的语句中单独定义和初始化每个变量。
std::cout和 << 允许我们将表达式作为文本输出到控制台。std::endl输出一个换行符,强制控制台光标移动到下一行。std::cin和 >> 允许我们从键盘获取值。
未赋予值的变量称为未初始化变量。尝试获取未初始化变量的值将导致未定义的行为,这可以通过多种方式表现出来。
C++ 保留了一组称为关键字的名称。这些在语言中具有特殊含义,不能用作变量名。
文字常量是直接插入源代码的固定值。例如 5 和“Hello world!”。
运算是涉及零个或多个输入值的数学计算,称为操作数。要执行的具体操作由提供的运算符表示。操作的结果产生一个输出值。
一元运算符采用一个操作数。二元运算符有两个操作数,通常称为左和右。三元运算符采用三个操作数。
表达式是文字、变量、运算符和函数调用的组合,它们被求值以产生单个输出值。这个输出值的计算称为评估。产生的值是表达式的结果。
表达式语句是通过在表达式末尾放置分号而变成语句的表达式。
编程很难,而且程序很少会在第一次就完美(或接近完美)。先让程序运行起来,然后再把它们改进成很棒的东西。
初始化和赋值有什么区别?
初始化为变量提供了一个初始值(在创建时)。
在变量已经定义之后,赋值给变量一个新的值。
什么时候发生未定义的行为?未定义行为的后果是什么?
未定义的行为发生在程序员执行 C++ 语言未明确规定的事情时。后果几乎可以是任何事情,从崩溃到产生错误的答案再到正常工作。
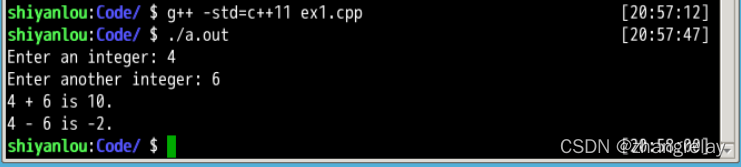
编写一个程序,要求用户输入一个数字,然后输入第二个数字。程序应该告诉用户这两个数字相加和相减的结果是什么。
程序的输出应匹配以下内容(假设输入为 6 和 4):
输入一个整数:6
输入另一个整数:4
6 + 4 等于 10。
6 - 4 是 2。
#include <iostream>
int main()
{
int x{};
std::cout << "Enter an integer: ";
std::cin >> x;
int y{};
std::cout << "Enter another integer: ";
std::cin >> y;
std::cout << x << " + " << y << " is " << x + y << ".\n";
std::cout << x << " - " << y << " is " << x - y << ".\n";
return 0;
}g++ -std=c++11 ex1.cpp
--

















 541
541

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









