



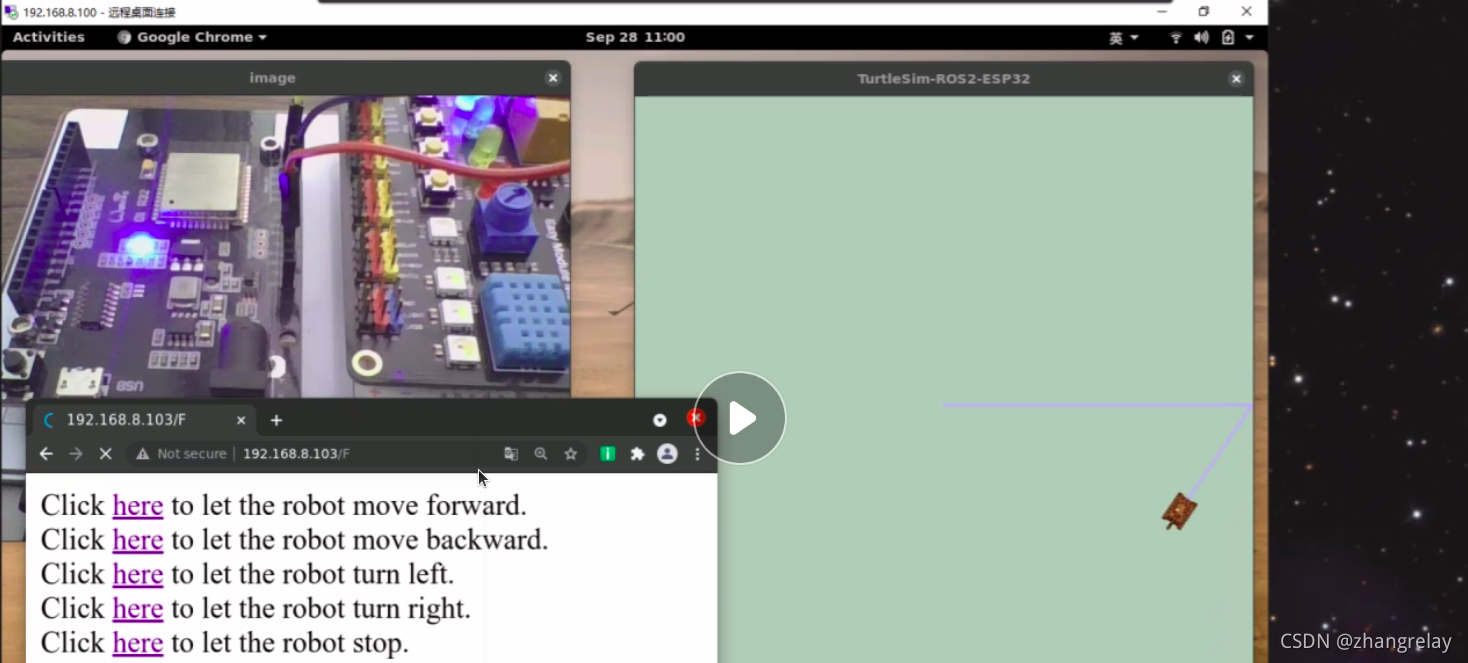
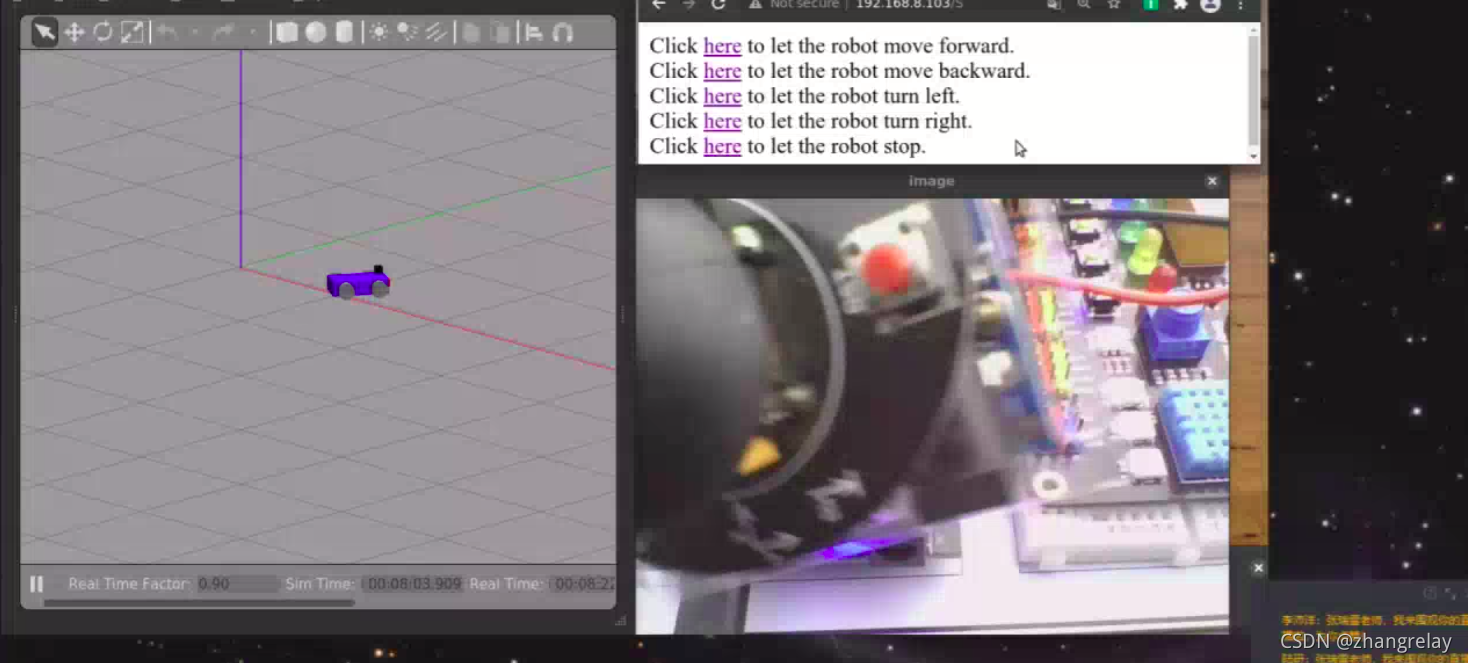
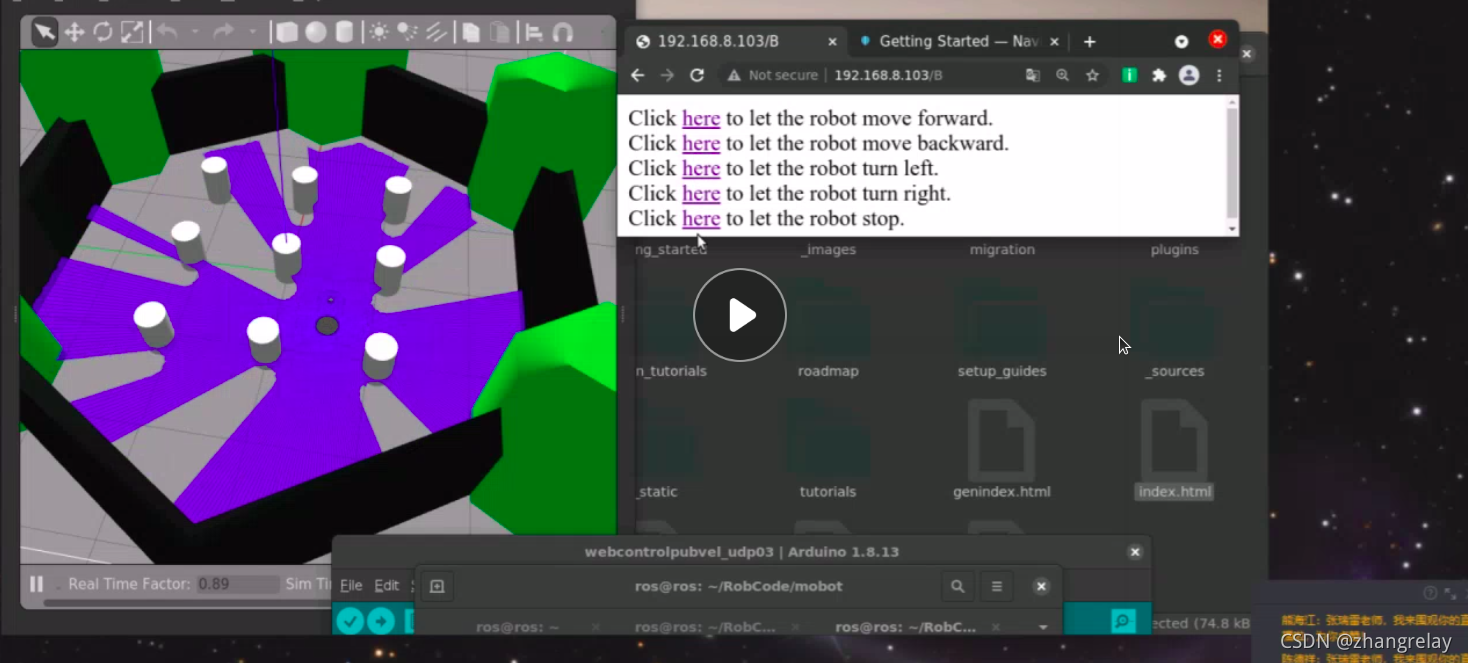
 该博客介绍了一个使用ROS2和Arduino结合的项目,通过ESP32节点接收HTTP请求来改变机器人移动方向。用户可以通过点击网页链接来控制机器人前进、后退、左转、右转和停止。代码中定义了不同的速度和转向标志,根据接收到的HTTP请求更新机器人速度话题(cmd_vel)。
该博客介绍了一个使用ROS2和Arduino结合的项目,通过ESP32节点接收HTTP请求来改变机器人移动方向。用户可以通过点击网页链接来控制机器人前进、后退、左转、右转和停止。代码中定义了不同的速度和转向标志,根据接收到的HTTP请求更新机器人速度话题(cmd_vel)。
- turtle1/cmd_vel
- mobot/cmd_vel
- cmd_vel
代码如下:
#include <ros2arduino.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#include <WiFiClient.h>
#define SSID "***"
#define SSID_PW "***"
#define AGENT_IP "***"
#define AGENT_PORT *** //AGENT port number
#define LED 4
#define PUBLISH_FREQUENCY 2 //hz
char velflag=0;
void publishVel(geometry_msgs::Twist* vel, void* arg)
{
(void)(arg);
static int cnt = 0;
if(velflag==0){
vel->linear.x = 0; //线速度
vel->angular.z = 0; //角速度
}
else if(velflag==1)
{
vel->linear.x = 1; //线速度
vel->angular.z = 0; //角速度
}
else if(velflag==3)
{
vel->linear.x = -1; //线速度
vel->angular.z = 0; //角速度
}
else if(velflag==2)
{
vel->linear.x = 0; //线速度
vel->angular.z = 1; //角速度
}
else if(velflag==4)
{
vel->linear.x = 0; //线速度
vel->angular.z = -1; //角速度
}
cnt++;
}
class VelPub : public ros2::Node
{
public:
VelPub()
: Node("esp32_cmdvel")
{
ros2::Publisher<geometry_msgs::Twist>* publisher_ = this->createPublisher<geometry_msgs::Twist>("cmd_vel");
this->createWallFreq(PUBLISH_FREQUENCY, (ros2::CallbackFunc)publishVel, nullptr, publisher_);
}
};
WiFiUDP udp;
WiFiServer server(80);
void setup()
{
pinMode(LED, OUTPUT);
WiFi.begin(SSID, SSID_PW);
while(WiFi.status() != WL_CONNECTED);
server.begin();
ros2::init(&udp, AGENT_IP, AGENT_PORT);
}
void loop()
{
static VelPub VelNode;
ros2::spin(&VelNode);
WiFiClient client = server.available(); // listen for incoming clients
if (client) { // if you get a client,
String currentLine = ""; // make a String to hold incoming data from the client
while (client.connected()) { // loop while the client's connected
if (client.available()) { // if there's bytes to read from the client,
char c = client.read(); // read a byte, then
if (c == '\n') { // if the byte is a newline character
// if the current line is blank, you got two newline characters in a row.
// that's the end of the client HTTP request, so send a response:
if (currentLine.length() == 0) {
// HTTP headers always start with a response code (e.g. HTTP/1.1 200 OK)
// and a content-type so the client knows what's coming, then a blank line:
client.println("HTTP/1.1 200 OK");
client.println("Content-type:text/html");
client.println();
// the content of the HTTP response follows the header:
client.print("Click <a href=\"/F\">here</a> to let the robot move forward. <br>");
client.print("Click <a href=\"/B\">here</a> to let the robot move backward. <br>");
client.print("Click <a href=\"/L\">here</a> to let the robot turn left. <br>");
client.print("Click <a href=\"/R\">here</a> to let the robot turn right. <br>");
client.print("Click <a href=\"/S\">here</a> to let the robot stop. <br>");
// The HTTP response ends with another blank line:
client.println();
// break out of the while loop:
break;
} else { // if you got a newline, then clear currentLine:
currentLine = "";
}
} else if (c != '\r') { // if you got anything else but a carriage return character,
currentLine += c; // add it to the end of the currentLine
}
// Check to see if the client request was "GET /H" or "GET /L":
if (currentLine.endsWith("GET /F")) {
digitalWrite(LED, HIGH); // GET /H turns the LED on
velflag=1;
}
if (currentLine.endsWith("GET /B")) {
digitalWrite(LED, HIGH); // GET /L turns the LED off
velflag=3;
}
if (currentLine.endsWith("GET /L")) {
digitalWrite(LED, HIGH); // GET /H turns the LED on
velflag=2;
}
if (currentLine.endsWith("GET /R")) {
digitalWrite(LED, HIGH); // GET /L turns the LED off
velflag=4;
}
if (currentLine.endsWith("GET /S")) {
digitalWrite(LED, LOW); // GET /H turns the LED on
velflag=0;
}
}
}
// close the connection:
client.stop();
}
}



















 1259
1259

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











