




这不是一篇零基础文章,需要先阅读之前博客,流程和在电脑上没有太大区别:
简单流水账:
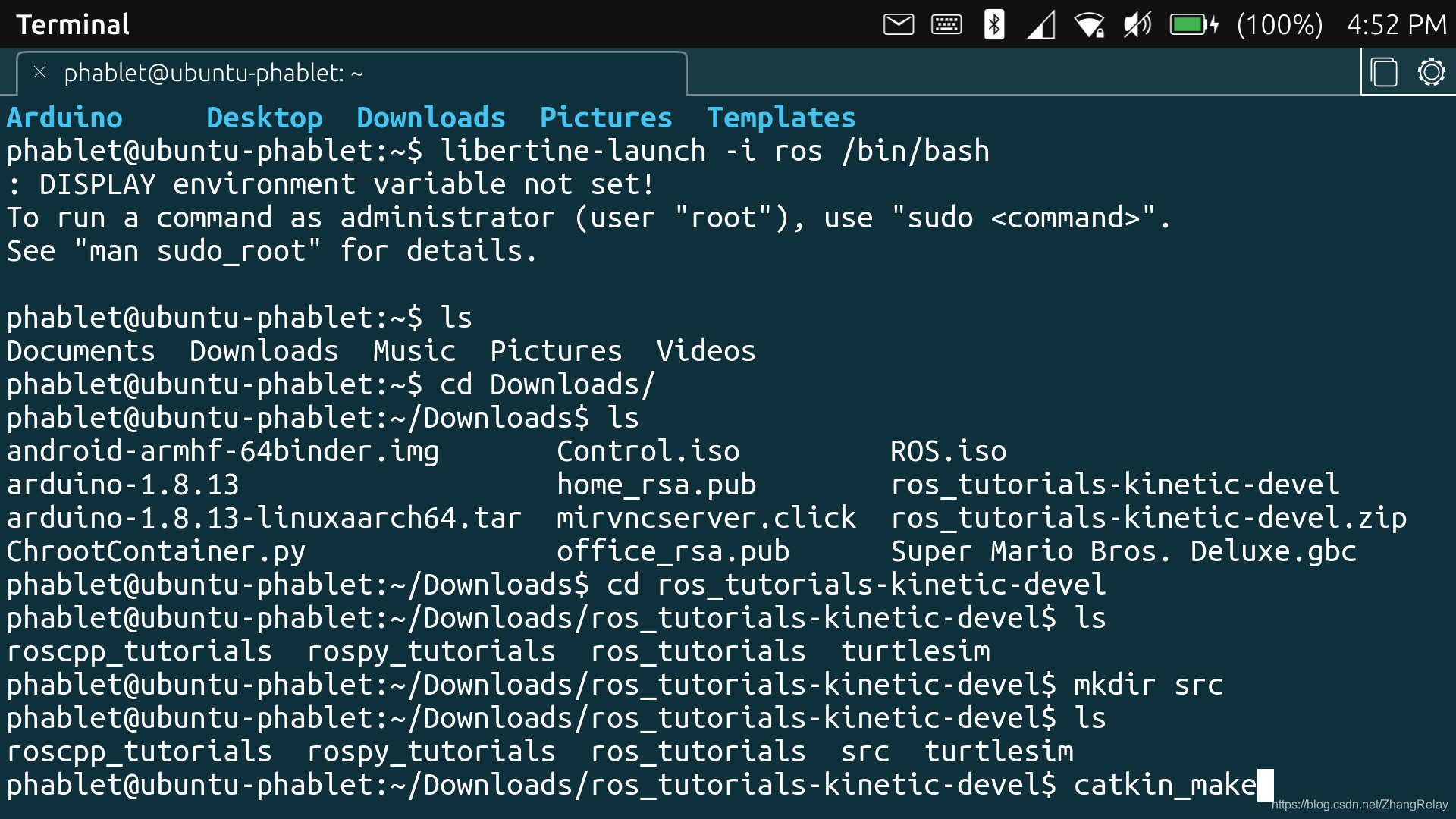
到ros_tutorials文件夹下,使用catkin_make编译!
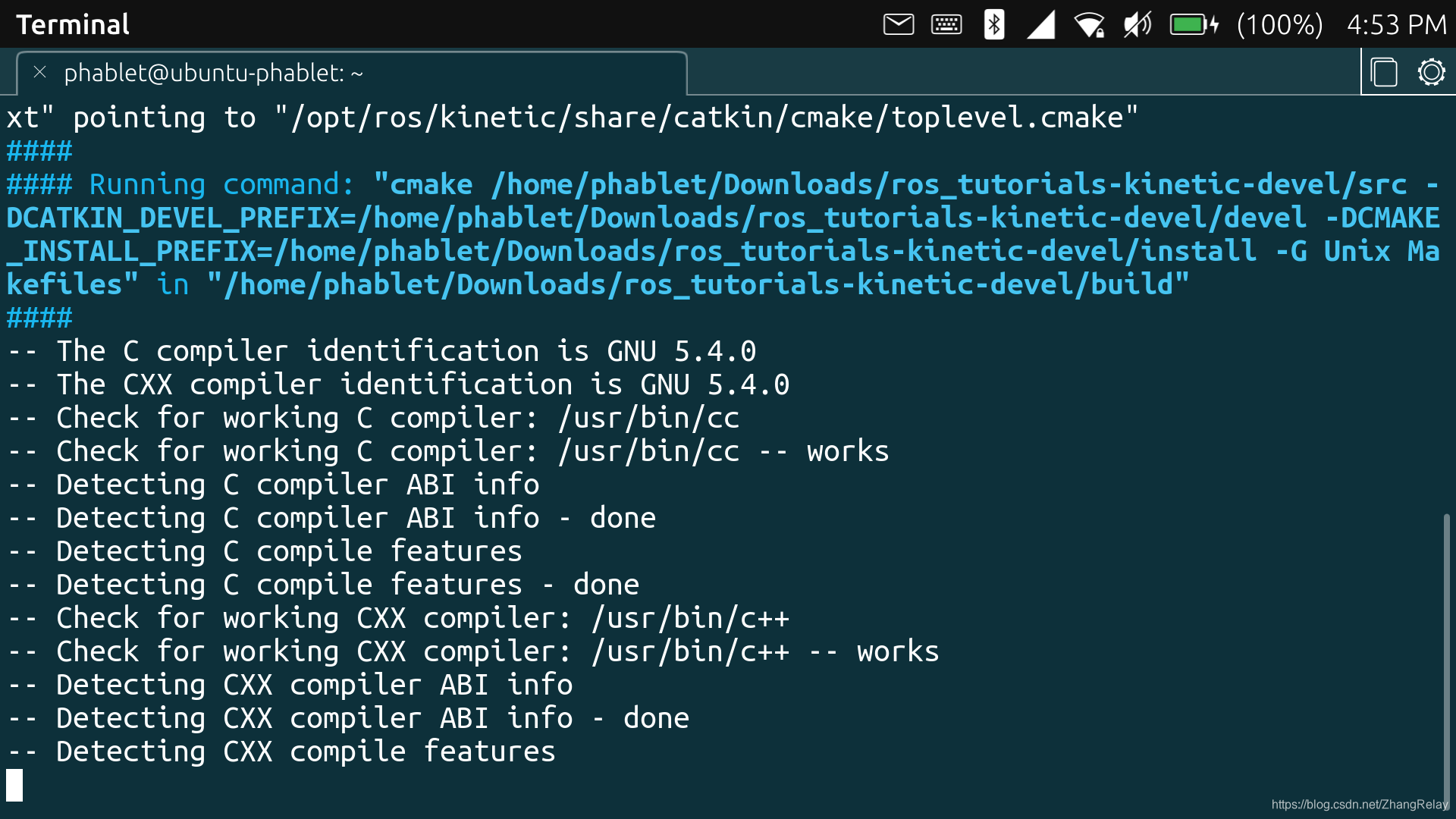
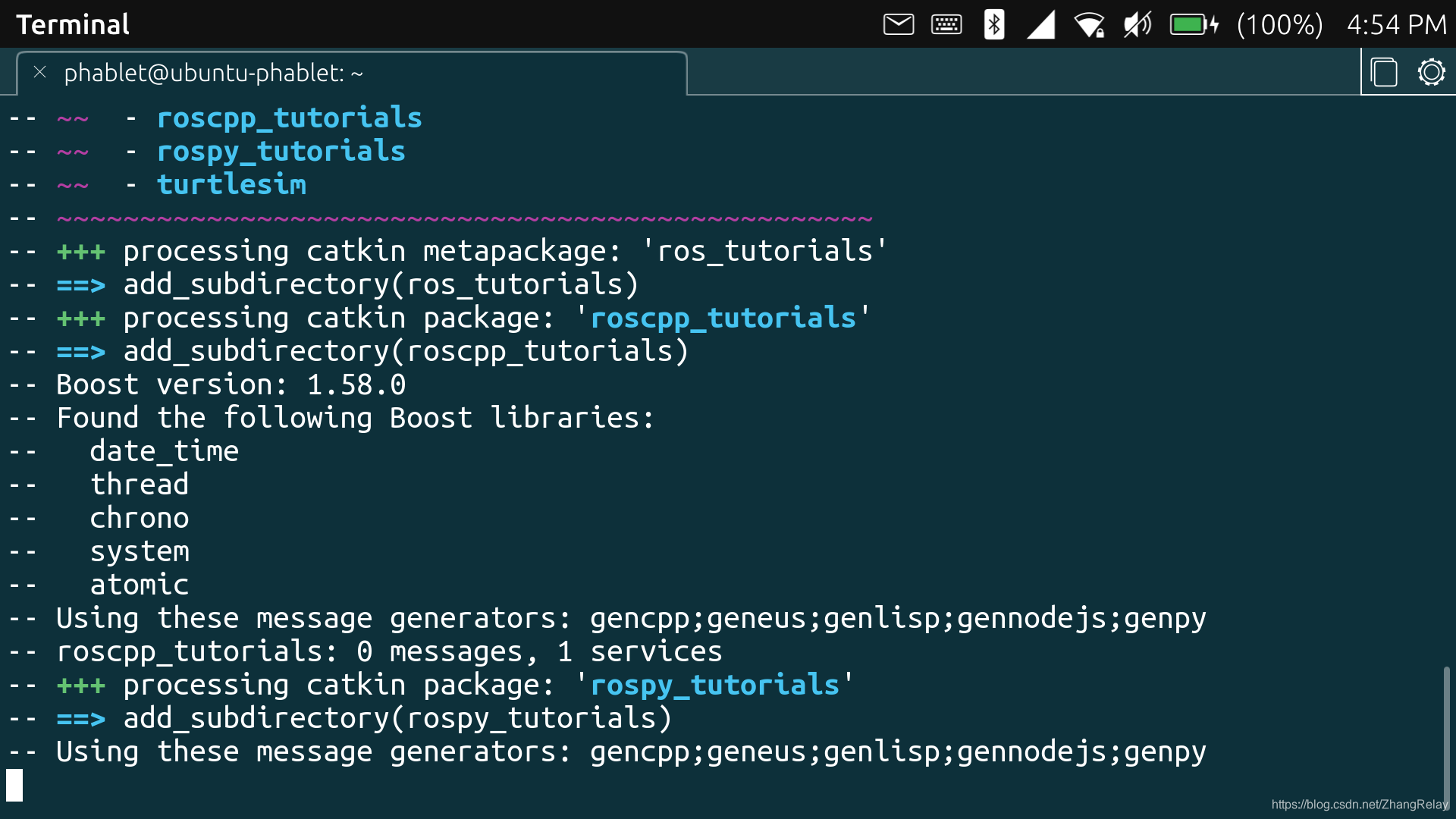
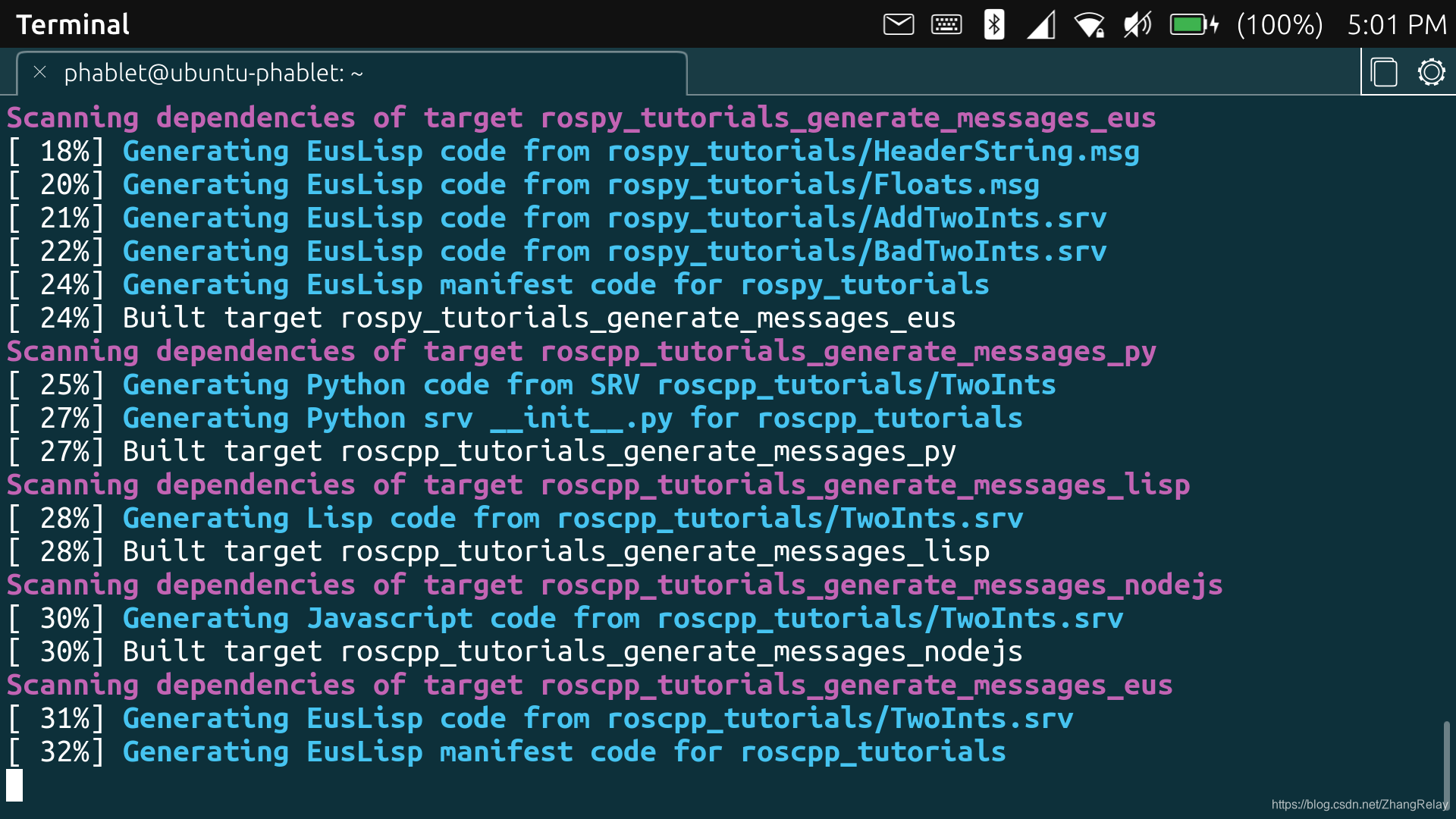
耐心等待编译完成!
看看效果吧!
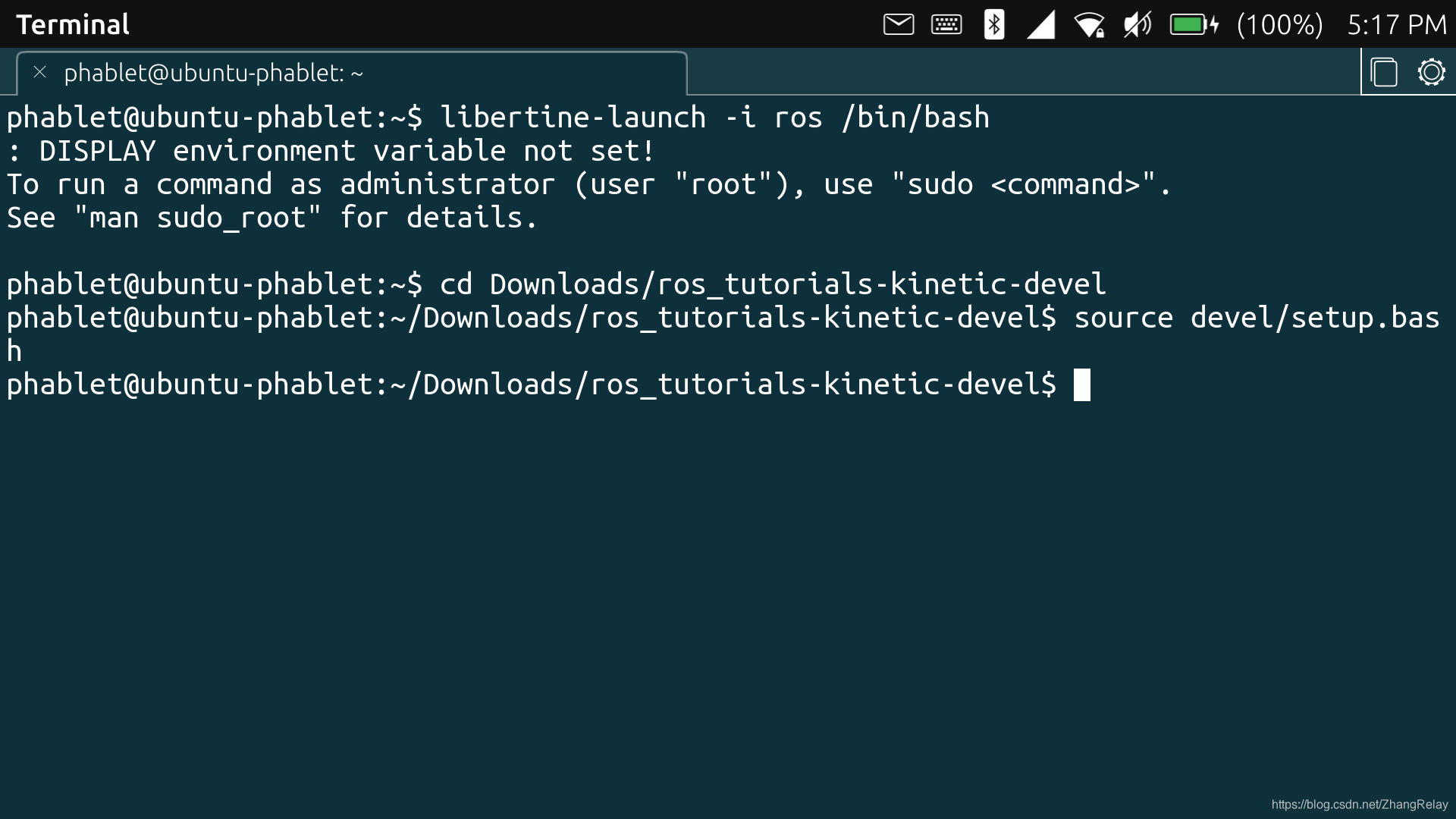
先导入工作区环境!
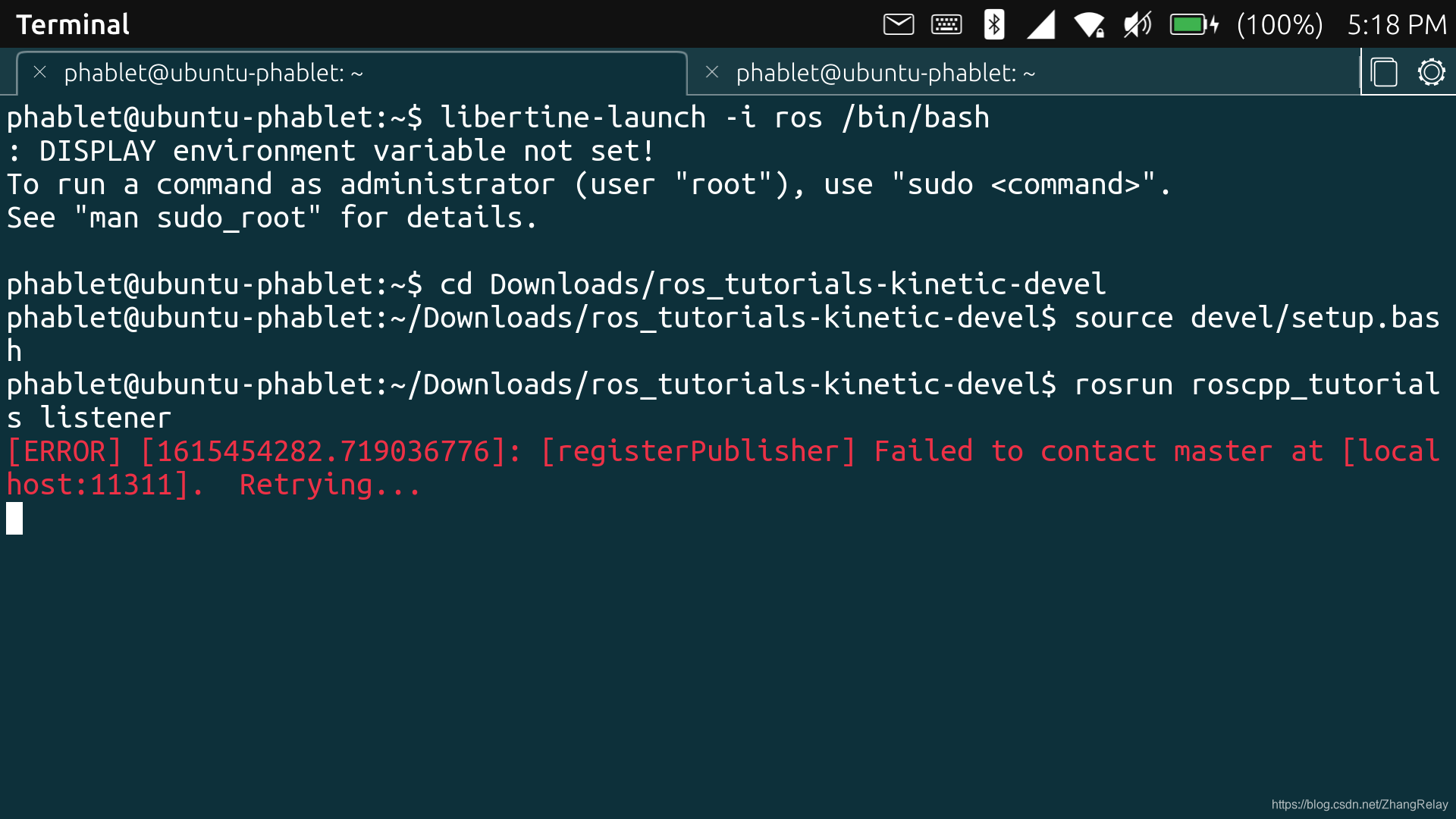
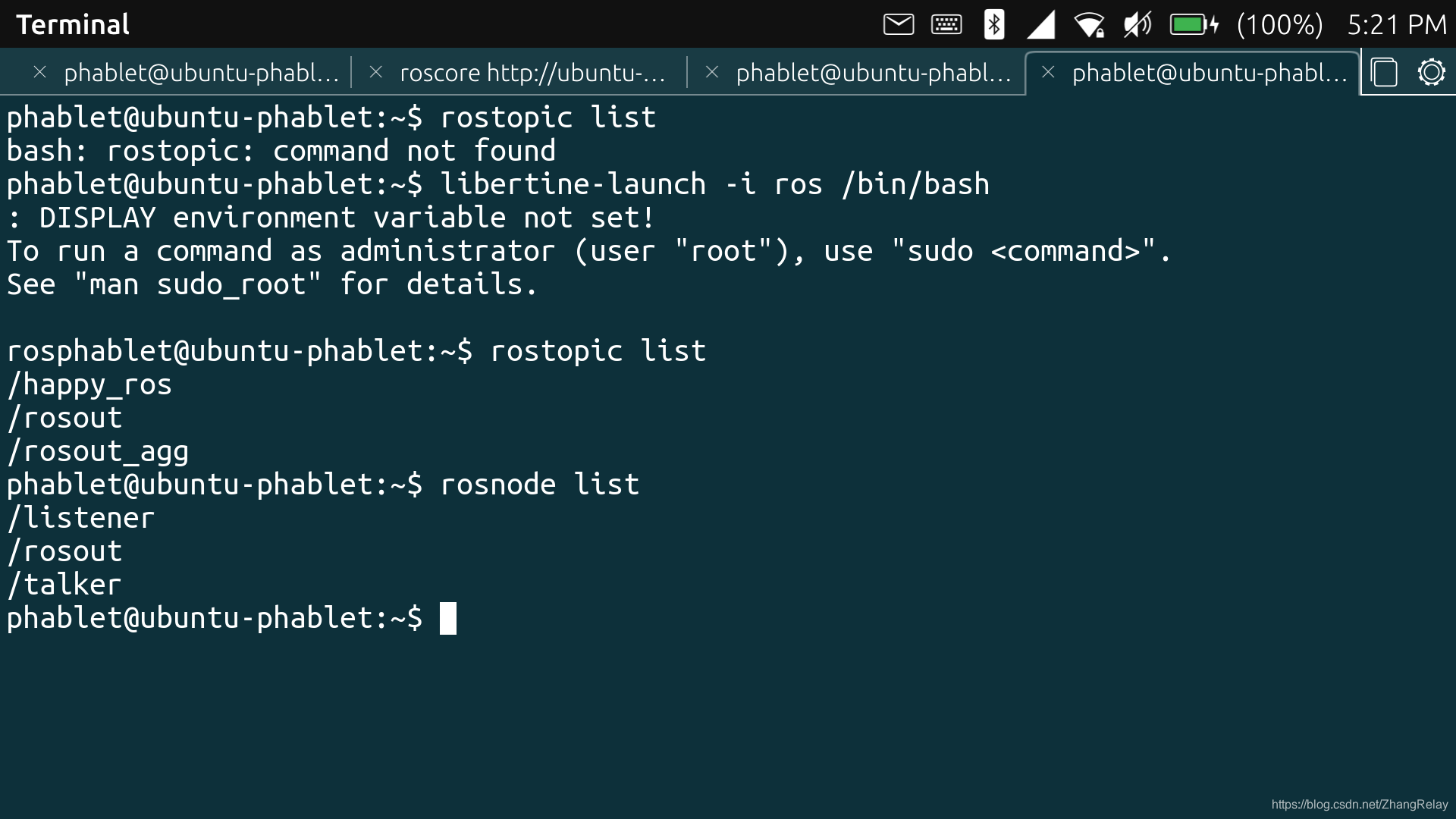
嗯,没有启动roscore,很久不用ros1了,ros2不用这一步哦!
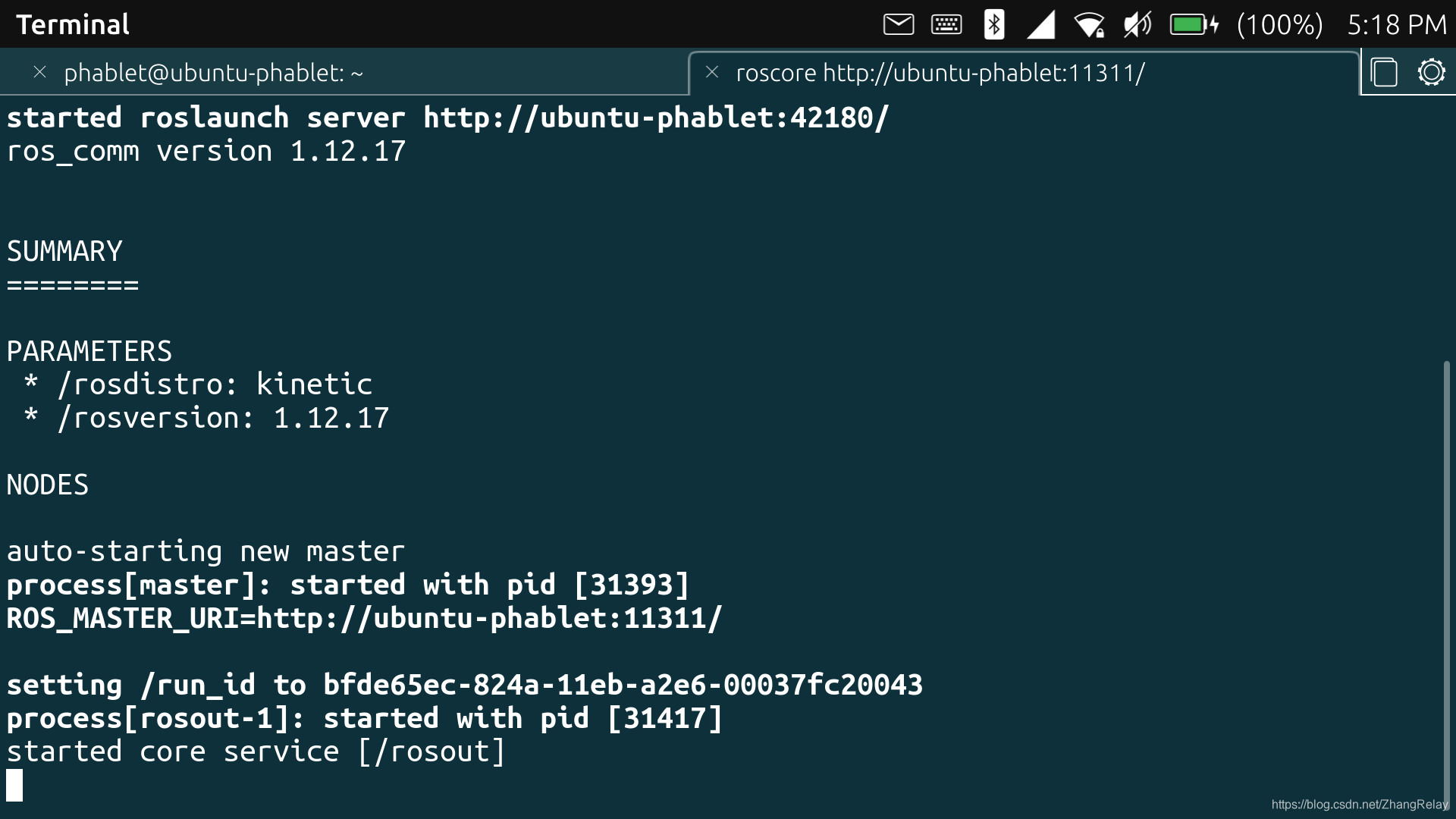
开启roscore
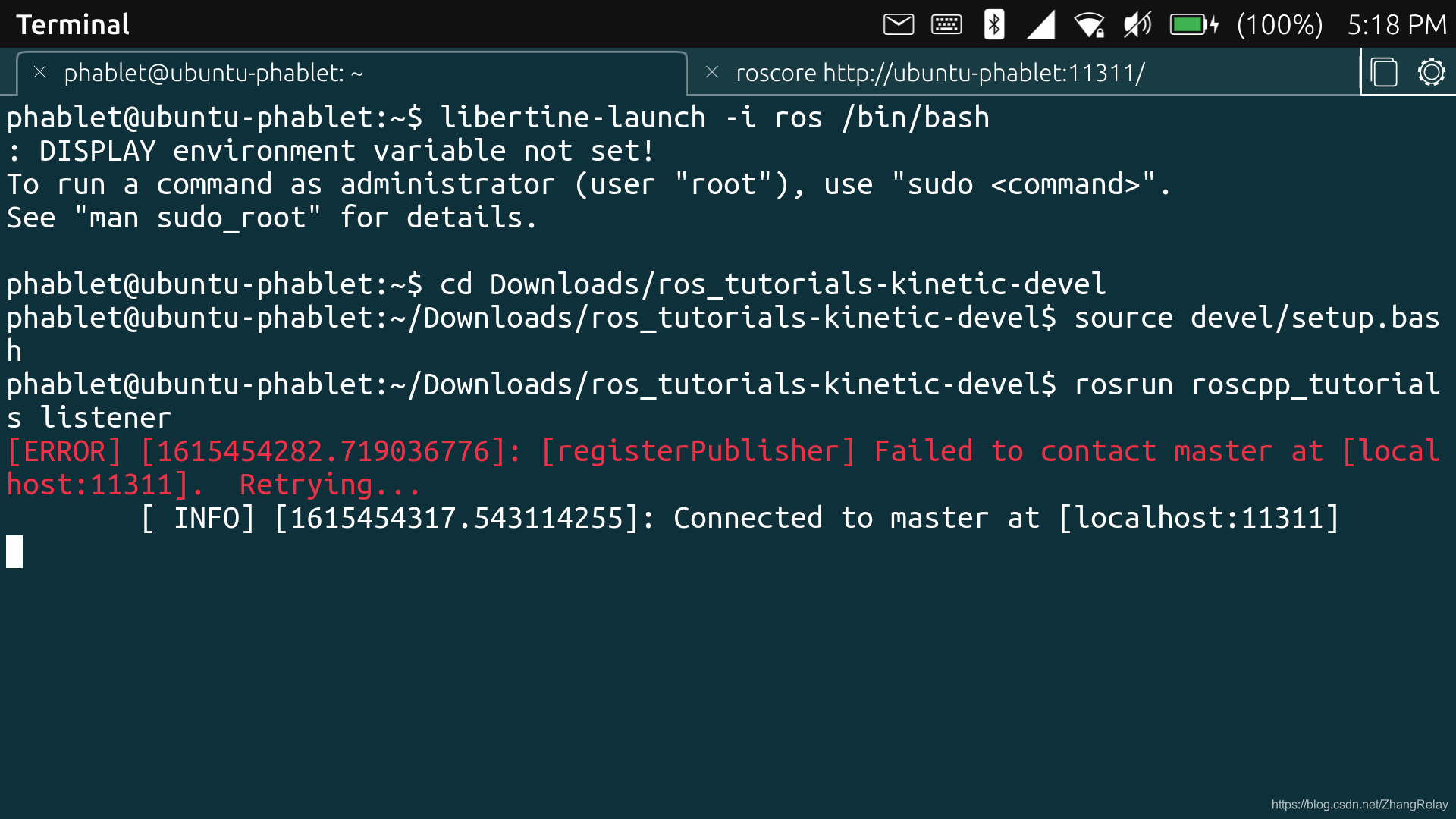
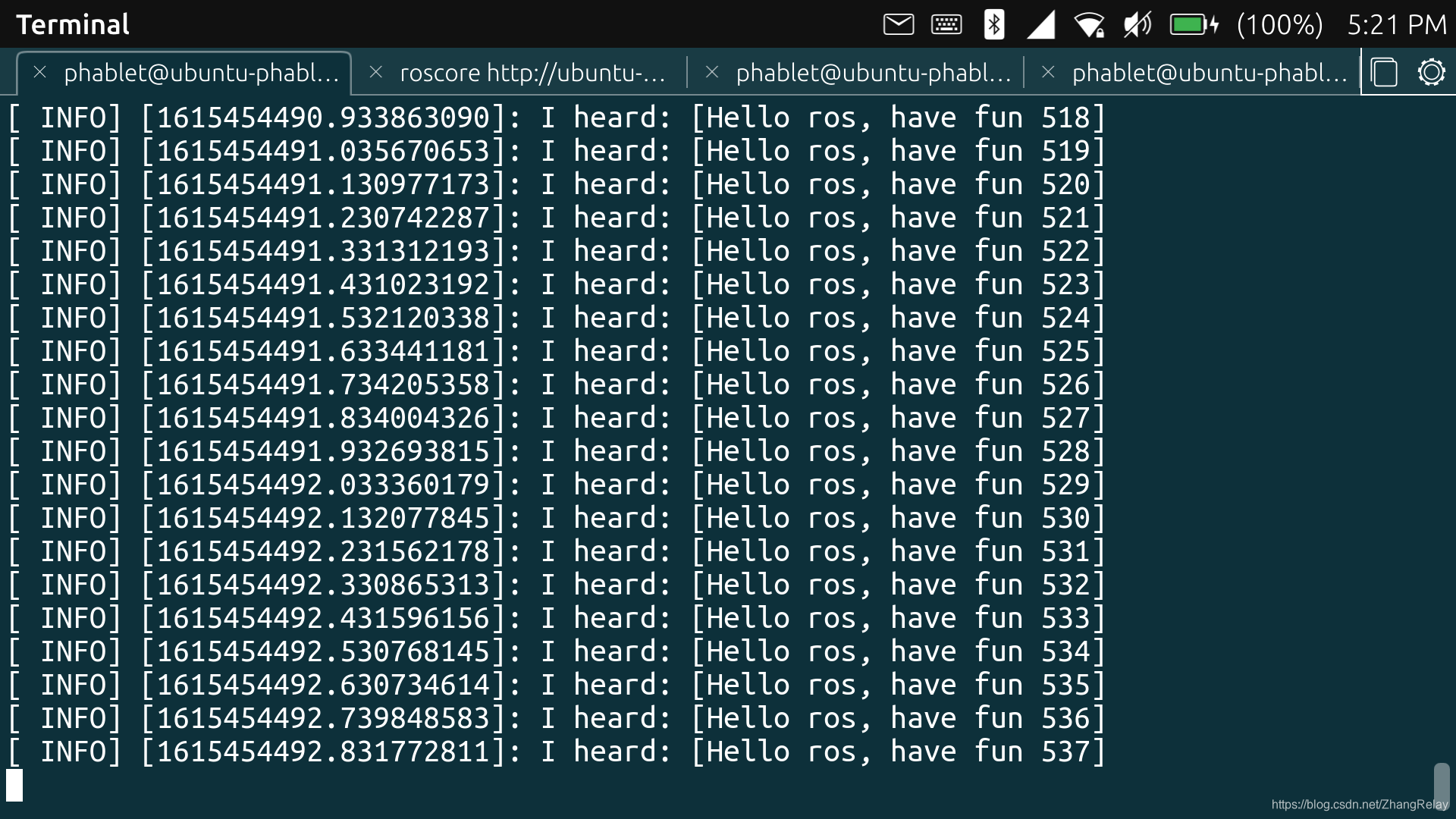
listener节点正常工作了!
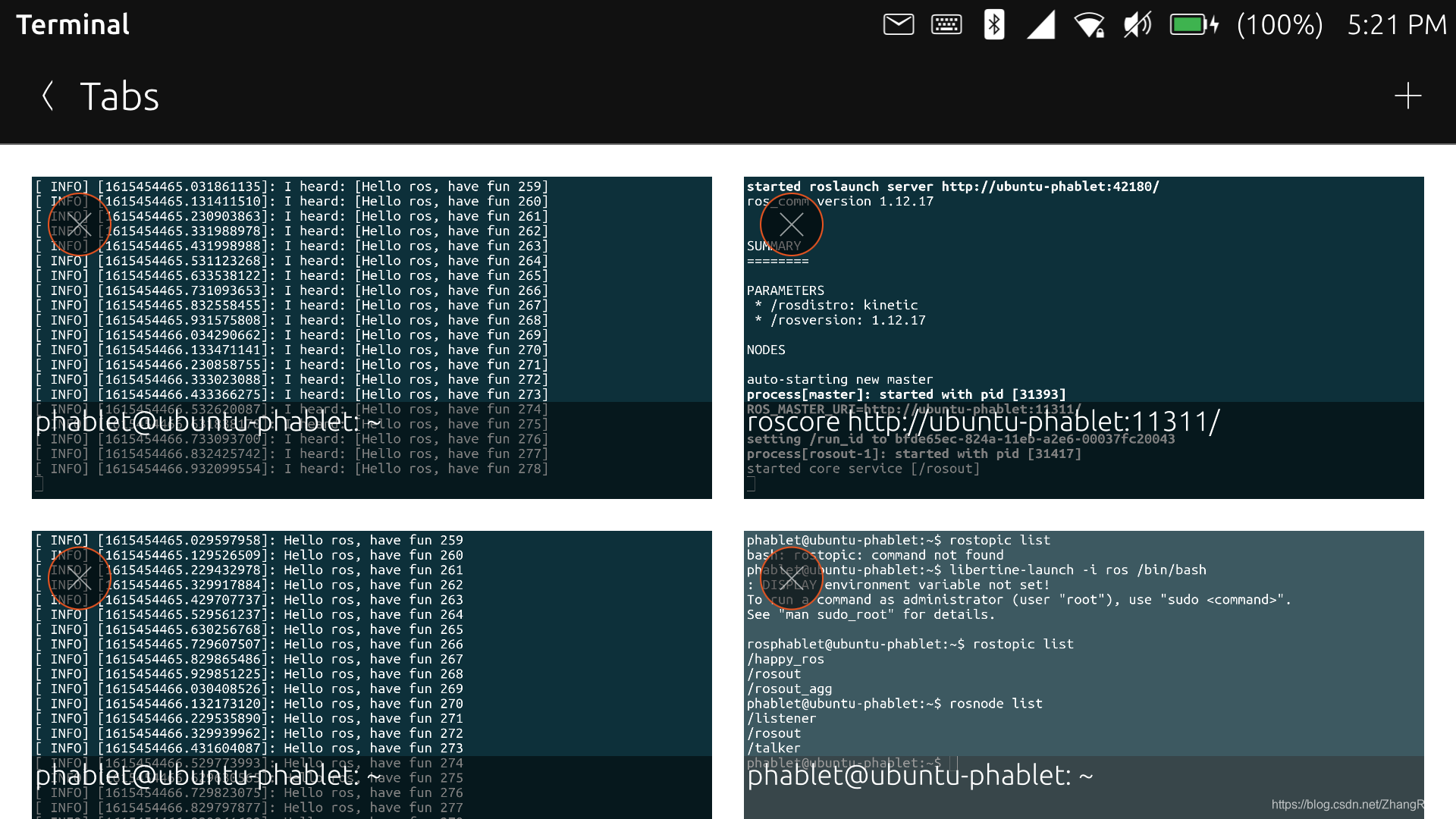
全部效果一览无遗啊!!!
happy_ros
收!
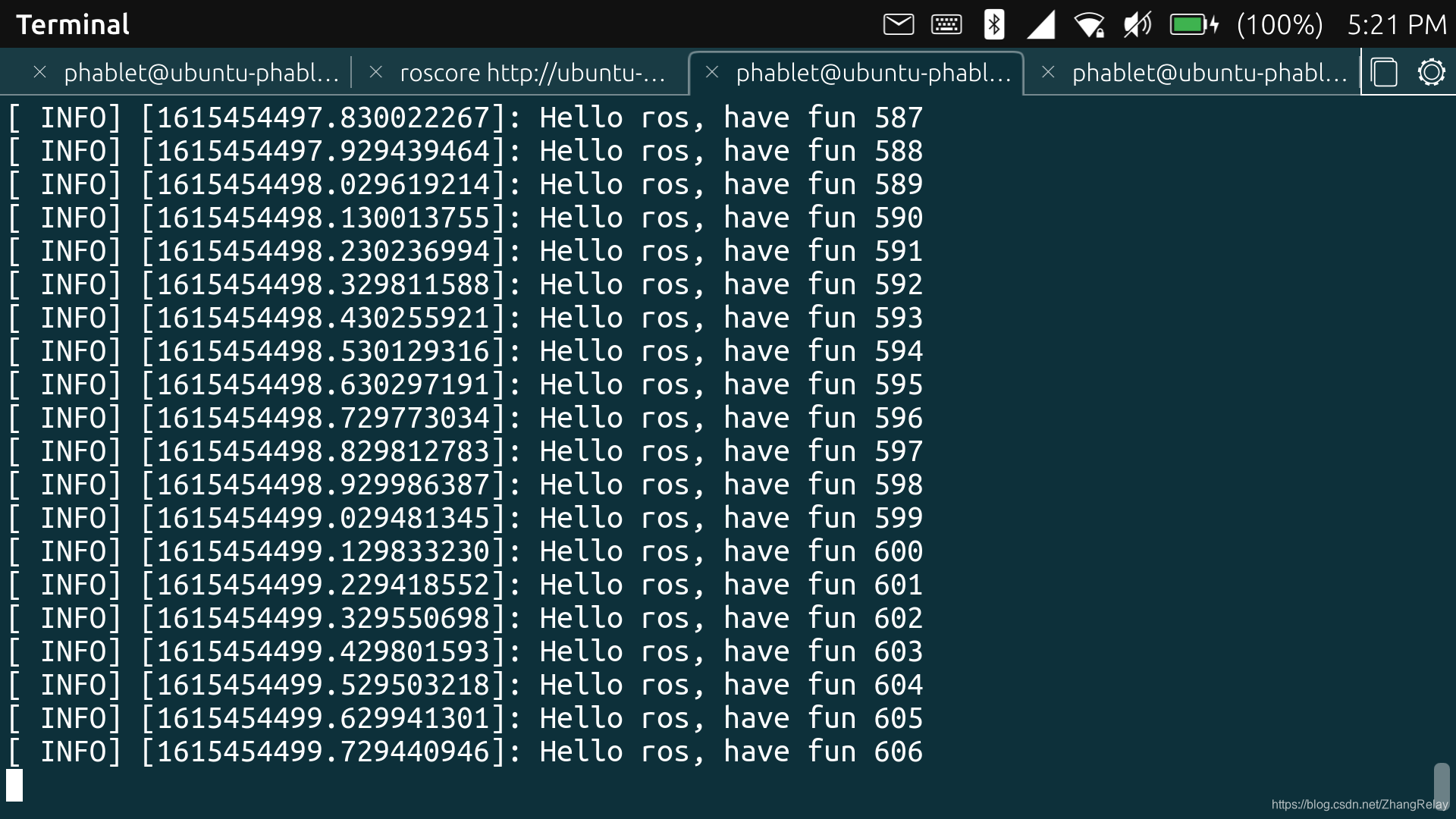
发
 本文介绍了如何在ROS2环境下配置并运行listener节点。首先需要编译ros_tutorials文件夹下的相关内容,然后导入工作区环境,最后开启roscore进行验证。文中详细记录了从环境搭建到节点运行的全过程。
本文介绍了如何在ROS2环境下配置并运行listener节点。首先需要编译ros_tutorials文件夹下的相关内容,然后导入工作区环境,最后开启roscore进行验证。文中详细记录了从环境搭建到节点运行的全过程。
这不是一篇零基础文章,需要先阅读之前博客,流程和在电脑上没有太大区别:
简单流水账:
到ros_tutorials文件夹下,使用catkin_make编译!
耐心等待编译完成!
看看效果吧!
先导入工作区环境!
嗯,没有启动roscore,很久不用ros1了,ros2不用这一步哦!
开启roscore
listener节点正常工作了!
全部效果一览无遗啊!!!
happy_ros
收!
发
 718
188
718
188
























 到【灌水乐园】发言
到【灌水乐园】发言








