



 博客围绕ROS2 Foxy版本展开,介绍了三款仿真软件。Webots可在开源3D机器人模拟器中模拟机器人,与ROS2集成;Ignition是Gazebo新一代版本,能实现与ROS 2的集成;Coppelia是V - Rep新一代版本,说明了基于ROS 2 Foxy启用它的方法,部分案例在不同系统测试通过。
博客围绕ROS2 Foxy版本展开,介绍了三款仿真软件。Webots可在开源3D机器人模拟器中模拟机器人,与ROS2集成;Ignition是Gazebo新一代版本,能实现与ROS 2的集成;Coppelia是V - Rep新一代版本,说明了基于ROS 2 Foxy启用它的方法,部分案例在不同系统测试通过。
目前,最新长期支持版ROS2为Foxy版本,时间到2023年,博客内容将只以此版本更新为主,windows+linux。
DDS:github.com/eProsima/Fast-DDS。
三款仿真:
- Webots:github.com/cyberbotics/webots_ros2
- Ignition:ignitionrobotics.org/docs/citadel/ros2_integration
- Coppelia:www.coppeliarobotics.com/helpFiles/en/ros2Tutorial.htm
Webots入门案例

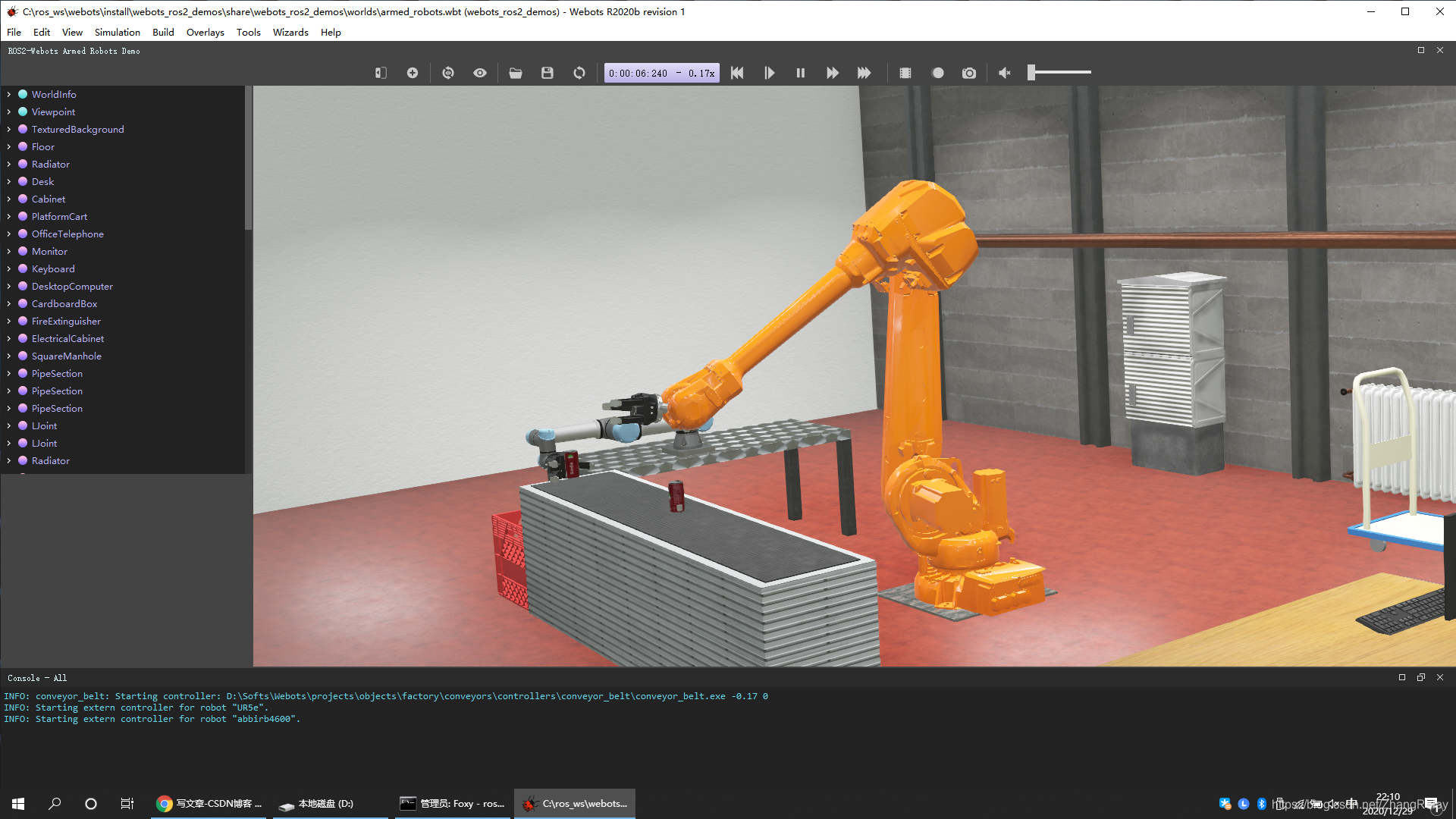
1 Webots
webots_ros2是一个软件包,提供了必要的接口以在Webots开源3D机器人模拟器中模拟机器人。它使用ROS2消息,服务和操作与ROS2集成。

部分的文档如下:
这部分案例在windows和ubuntu,都测试通过,稍后更新全部教程。
2 Ignition
这是Gazebo的新一代版本。
ROS 2集成
在本教程中,我们将学习如何将ROS 2与Ignition集成在一起。我们将在他们之间建立沟通。这可以在很多方面有所帮助;我们可以从ROS接收数据或命令,并将其应用于Ignition,反之亦然。
ros_ign_bridge
ros_ign_bridge提供了一个网桥,使ROS 2和Ignition传输之间可以交换消息。它的支持仅限于某些消息类型。请检查此自述文件以验证网桥是否支持您的消息类型。
测试过ubuntu,ok。
3 Coppelia
这是V-Rep的新一代版本,具体参考第一部分链接:
本教程将尝试以简单的方式说明如何基于ROS 2 Foxy启用CoppeliaSim ROS 2。
首先,应确保至少已通过ROS 2官方教程,至少在初学者部分。然后,我们假设正在运行最新的Ubuntu,已安装ROS,并且已设置工作区文件夹。在此还请参阅有关ROS 2安装的官方文档。通过ROS 2接口(libsimExtROS2Interface.so)支持CoppeliaSim中的常规ROS 2功能。Linux发行版应包含已经在CoppeliaSim / compiledROSPlugins中编译的文件,但首先需要将其复制到CoppeliaSim /,否则将不会被加载。但是,可能会遇到插件加载问题,具体取决于系统特性:确保始终检查CoppeliaSim的终端窗口以获取有关插件加载操作的详细信息。启动CoppeliaSim时将加载插件。另外,在运行CoppeliaSim之前,请确保获取ROS 2环境。如果无法加载该插件,则应自行重新编译。它是开源的,可以根据需要进行任意修改,以支持特定功能或扩展其功能。如果特定的消息/服务/等。需要支持,请确保在重新编译之前编辑simExtROSInterface / meta /中的文件。
测试过ubuntu,ok。



















 2436
2436




 到【灌水乐园】发言
到【灌水乐园】发言









