



 博客指出ROS1是ROS2普及的最大竞争对手,但未来属于ROS2。介绍了ROS2 Foxy版本功能渐趋全面,看好下一个LTS版本。提及Webots+ROS2组合,还谈到Eclipse、Workshop 2020等相关内容,以及倾斜激光检测障碍物、micro - ROS等应用。
博客指出ROS1是ROS2普及的最大竞争对手,但未来属于ROS2。介绍了ROS2 Foxy版本功能渐趋全面,看好下一个LTS版本。提及Webots+ROS2组合,还谈到Eclipse、Workshop 2020等相关内容,以及倾斜激光检测障碍物、micro - ROS等应用。
官宣,ROS1成为ROS2普及最大竞争对手,为啥,使用习惯使然,然而未来只有ROS2。

ROS2Foxy版本功能越来越全面,应该是成功试水,下一个LTS(预计2022年5-6月推出)更看好!
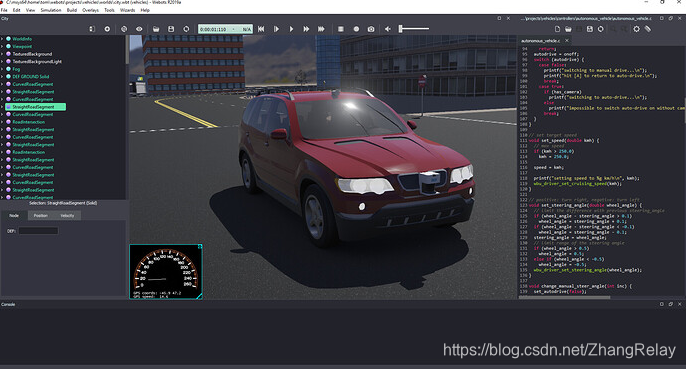
Webots+ROS2
这个地表最强机器人仿真器由收费到免费,再到开源,然后又全面拥抱ROS2,让我逐渐想放弃Gazebo了,当然Gazebo已经自我放弃了,它的下一个版本是Ignition Robotics功能很是强大!
- 不过还是有不少小伙伴学习ROS1+Gazebo,这种已经被官宣淘汰的组合工具,也许是出于情怀吧。
功能完善主要集中在:
- 与ROS2集成的状态
- 愿景和目标
- 行业中使用情况Webots+ROS2
- 开放,建议,提议,协作
Eclipse
貌似使用VSCode的很多,这个IDE用得少,当然使用Vim更多。
Workshop 2020
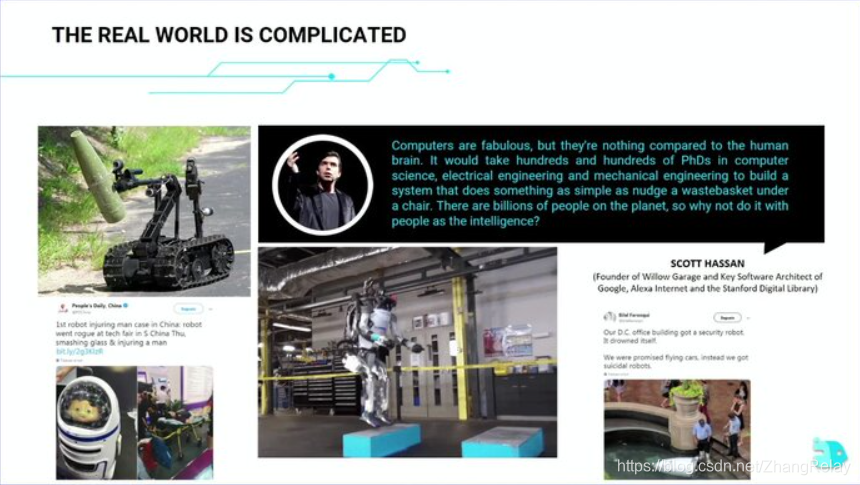
里面这句话很有趣,数百个博士构建一个系统……才能实现如此简单的功能……
开源也要在工业机器人领域发力了。
ROS也用于卫星设备测试,Google X项目,云仿真等。
当然也可以关心一下Rviz的升级版ARviz,Nav2功能也进一步完善。
MOCAP4ROS2是由EU ROSIN资助并与Eurobench项目协调的FTP。目标是标准化ROS2中某些运动捕捉系统的集成。


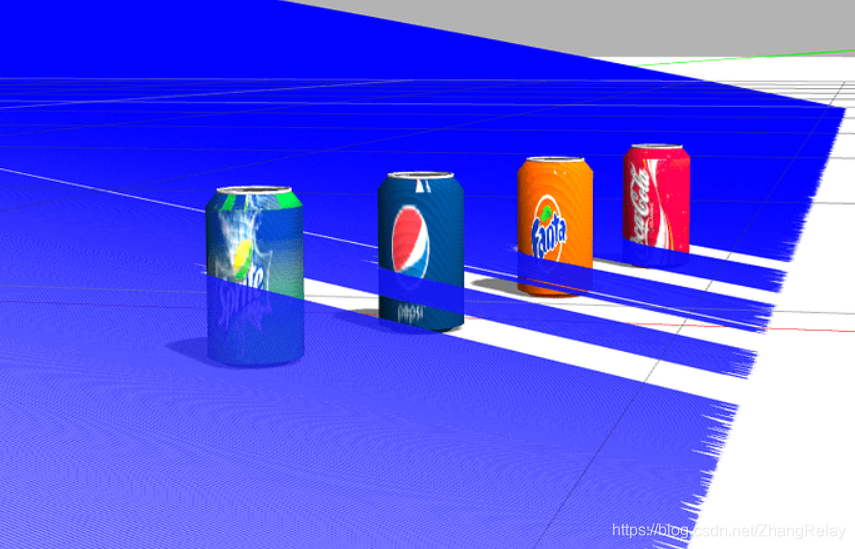
倾斜激光检测障碍物
这个……(⊙﹏⊙)
联想赞助了ROS日历……
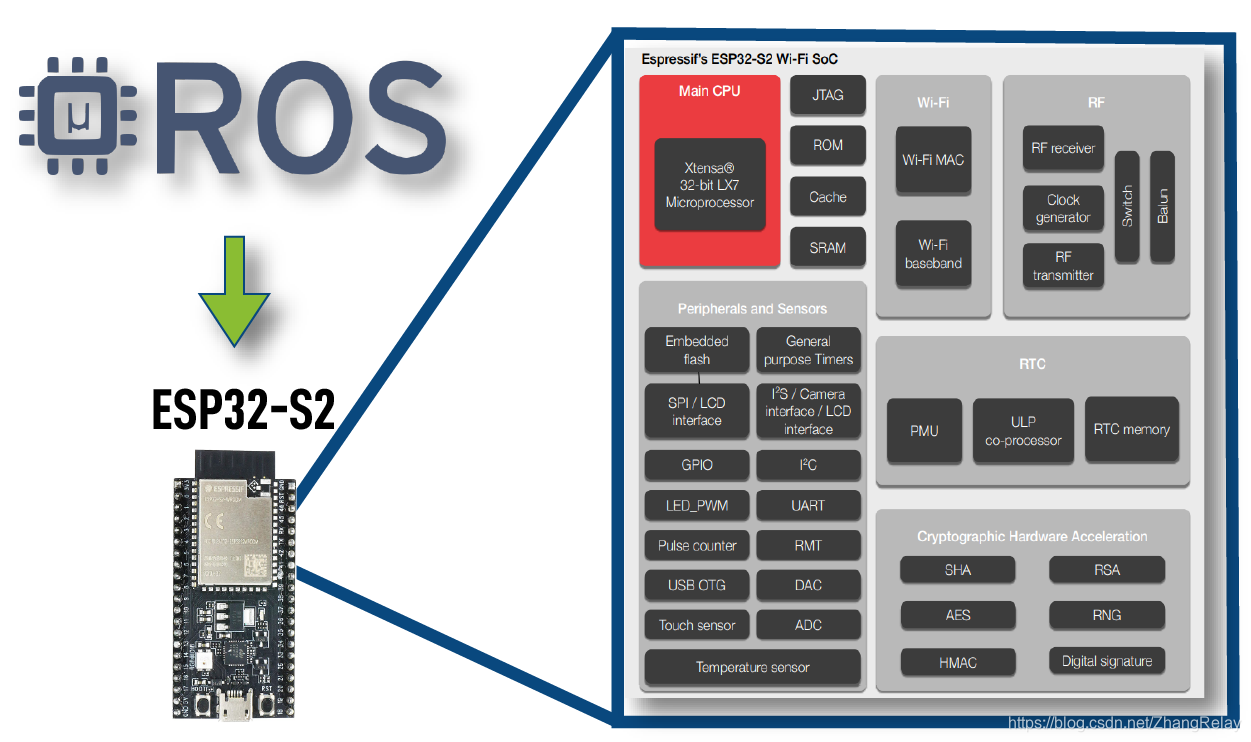
micro-ROS(ROS2)
ESP32-S2
ZERO+DUE
- github.com/micro-ROS/micro_ros_arduino



















 1300
1300

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











