




 本文探讨了在ROS2和Gazebo环境下,使用激光和视觉传感器进行目标跟踪的方法。通过编写mobot_follow节点,实现了对特定物体coke_can的识别与跟随,展示了在不同光照条件下的赛道仿真效果。
本文探讨了在ROS2和Gazebo环境下,使用激光和视觉传感器进行目标跟踪的方法。通过编写mobot_follow节点,实现了对特定物体coke_can的识别与跟随,展示了在不同光照条件下的赛道仿真效果。
目标跟踪可以使用激光或视觉传感器,本节开始只提供思路,无教程,供有兴趣的朋友自主实践。
- 激光测距
- 视觉识别
- 融合技术
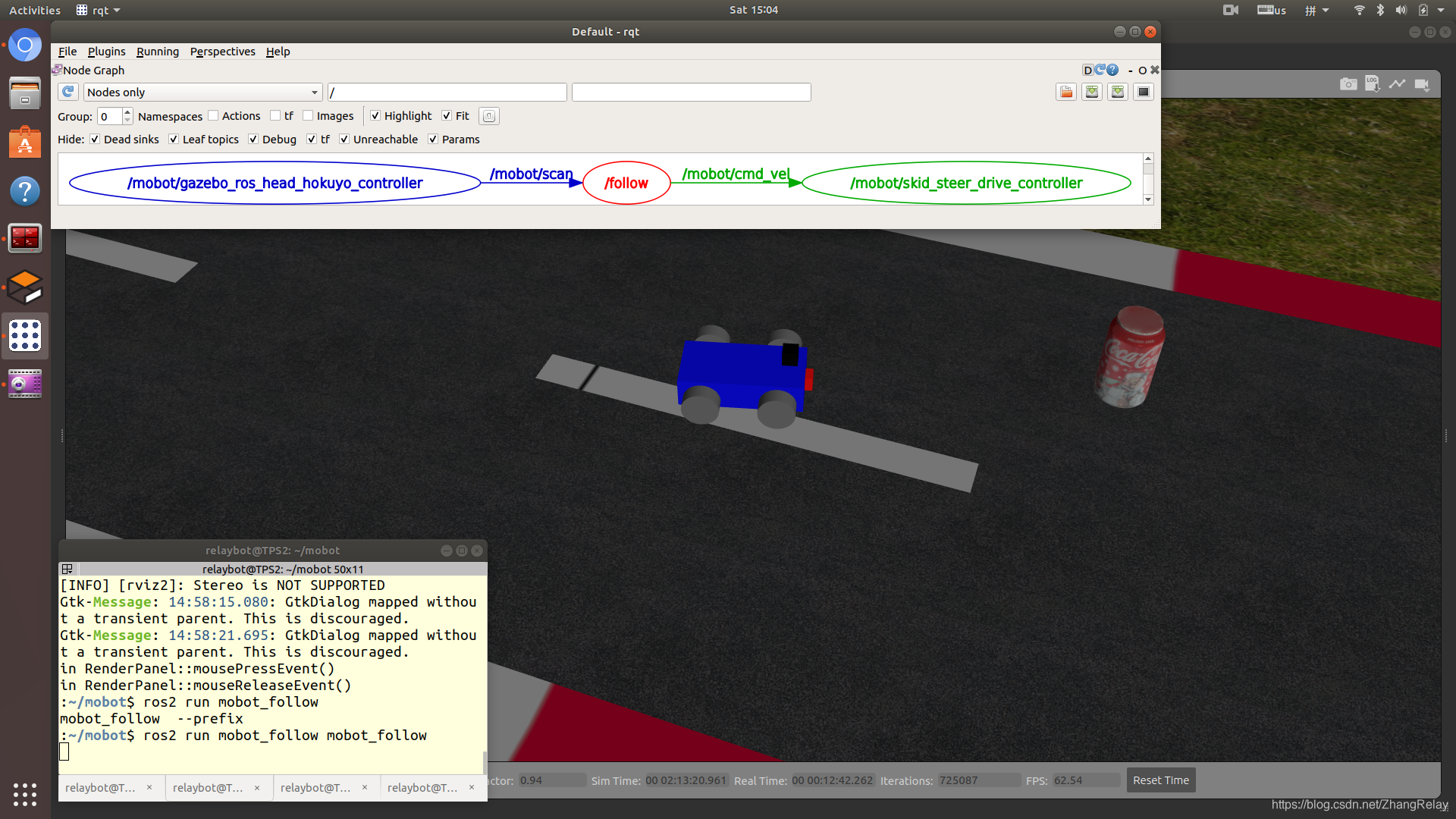
如下图所示:
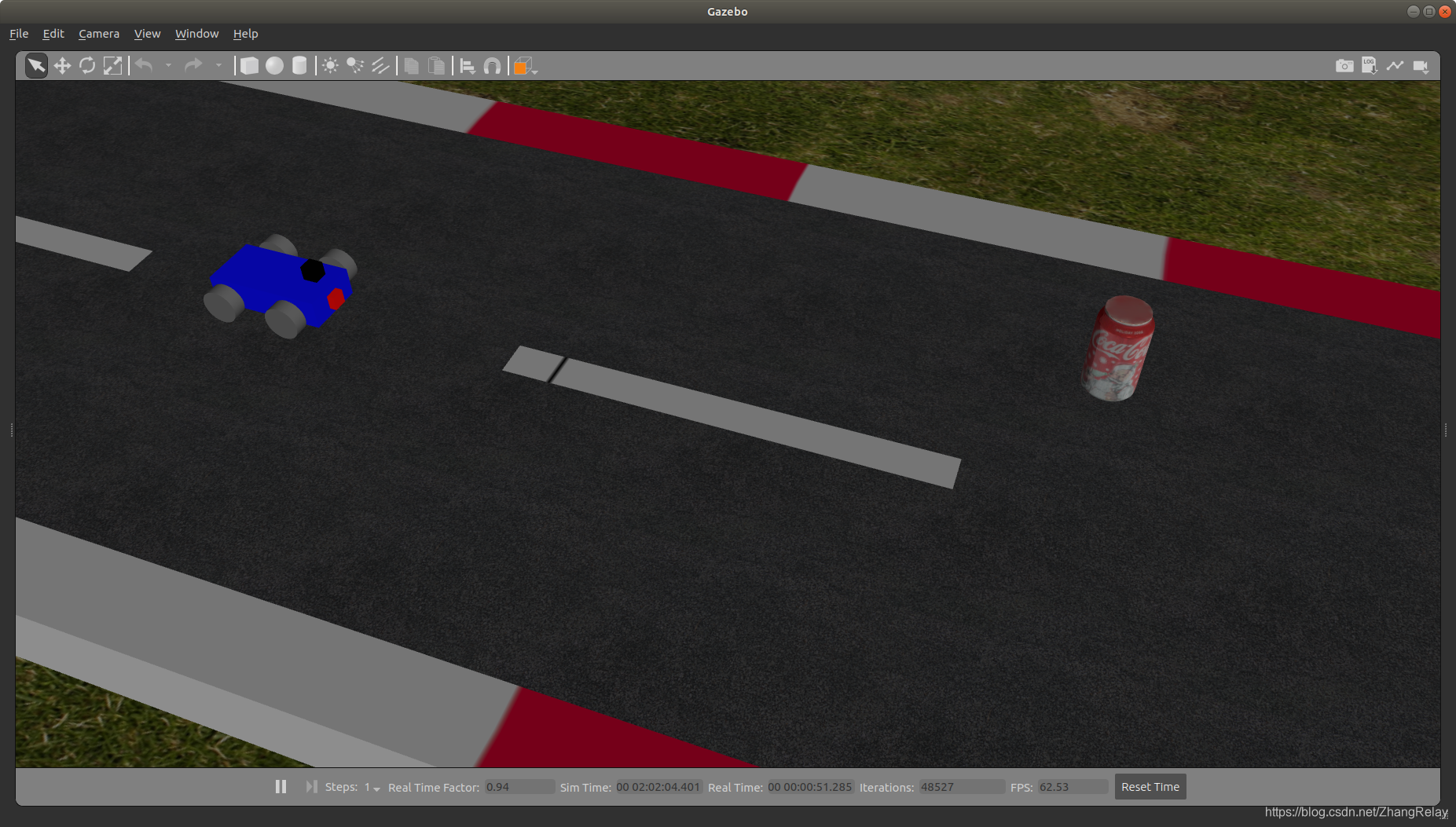
如何编写mobot_follow节点,识别coke_can并跟随coke进行运动呢?
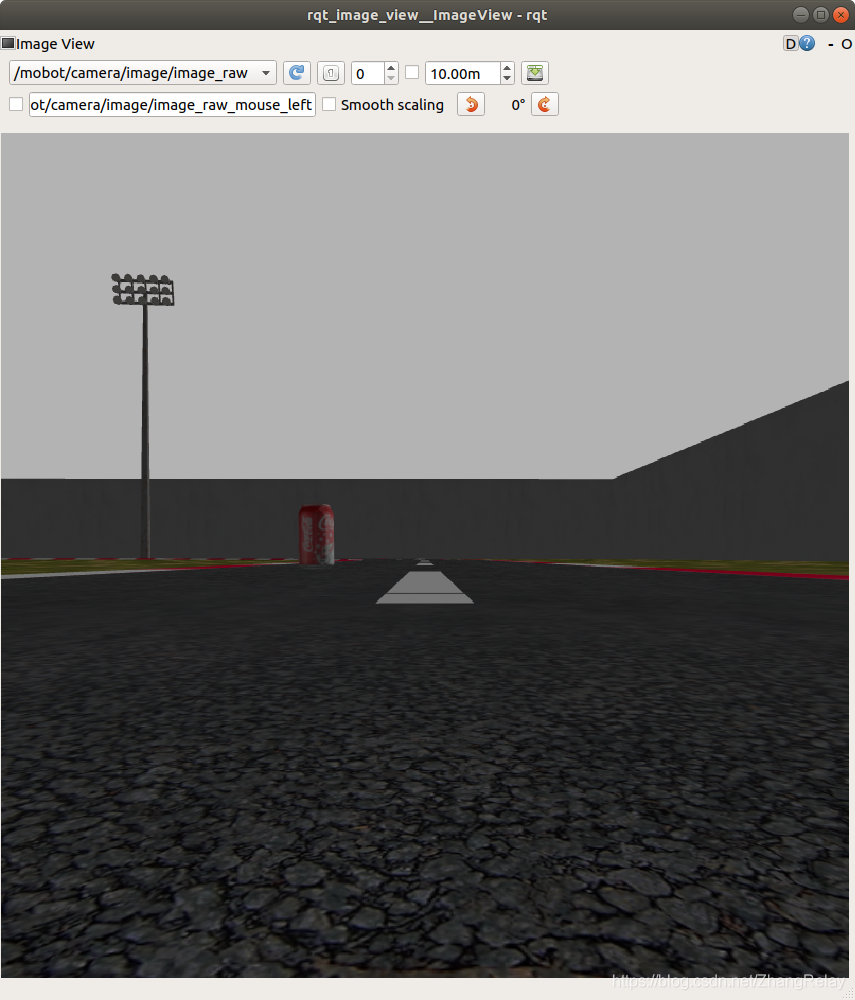
视觉:
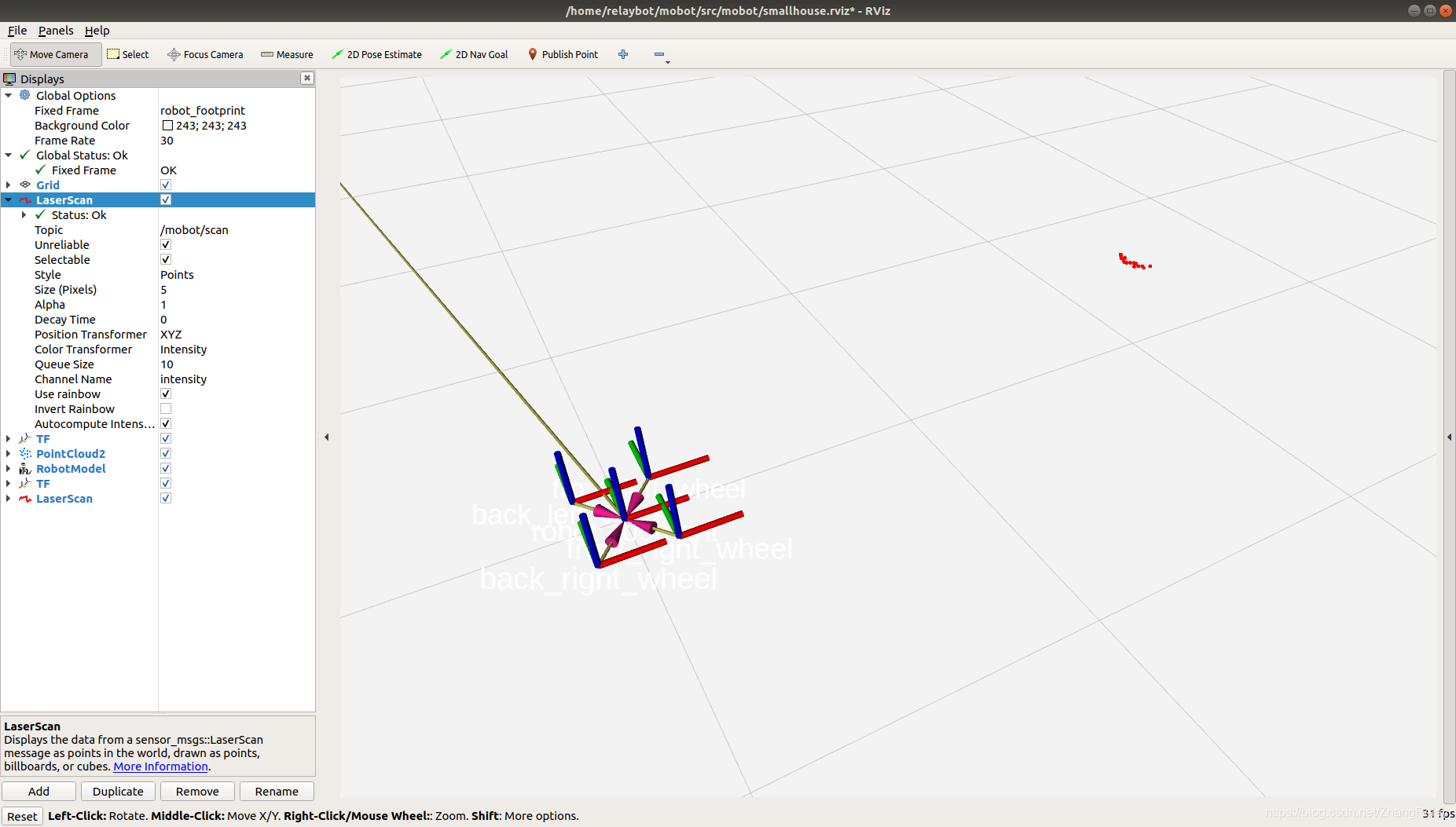
激光:
参考指令:
第一个终端开启仿真环境:
ros2 launch mobot racetrack.launch.py
第二个终端开启跟随:
ros2 run mobot_follow mobot_follow
效果:
具体视频如下:
ROS2和Gazebo9中mobot物体跟随仿真测试
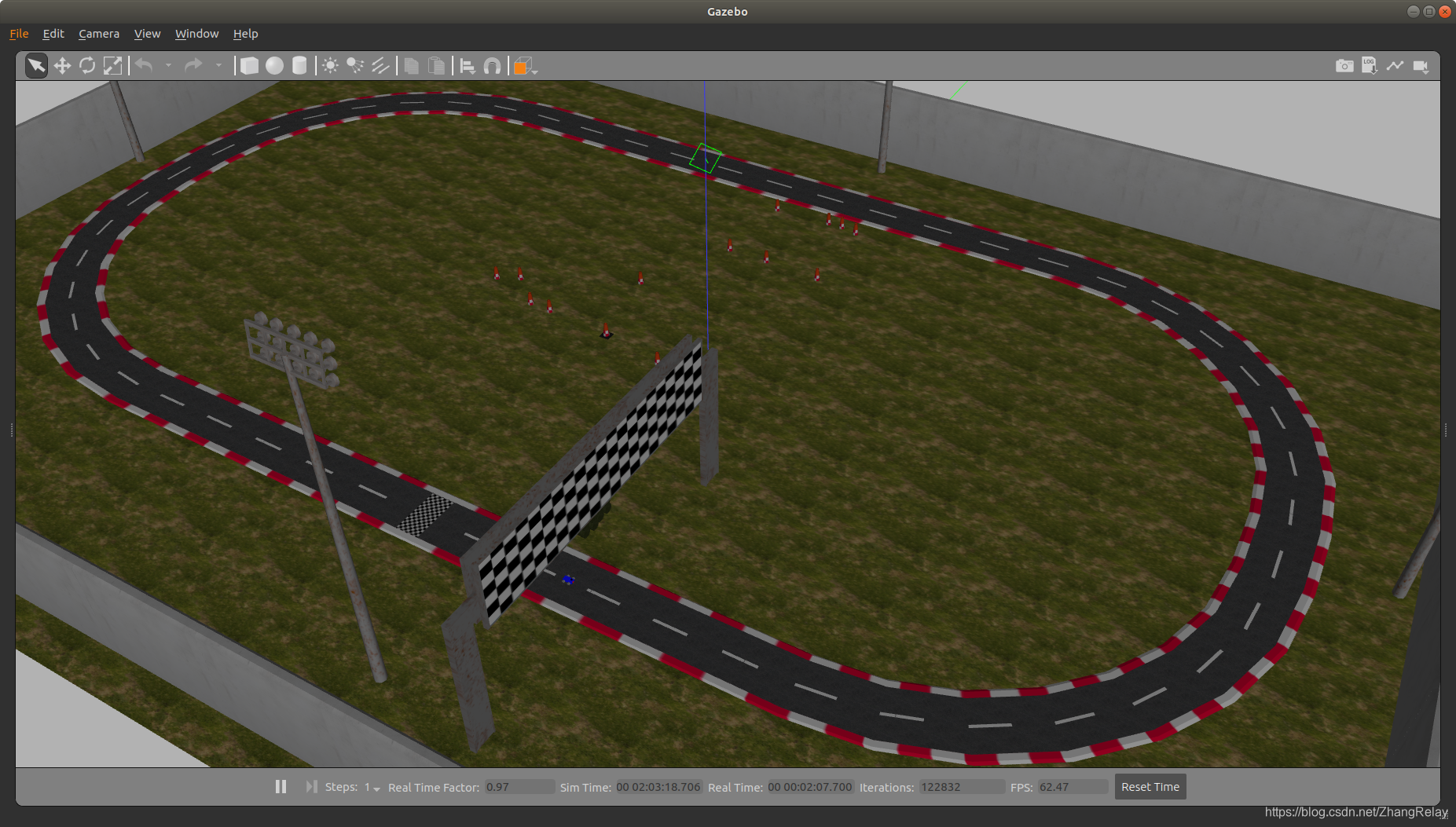
环境也提供各种复杂模式~
白天:

夜晚:

也许这些有些无趣?编程程序实现竞速是不是更刺激一些呢?
ROS2和Gazebo9中mobot跑道环境仿真测试
更多内容后续补充~下一节~多机器人仿真实践~



















 1983
1983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











