




 本课程聚焦于使用Arduino搭建小车的技术细节,涵盖从微观到宏观的知识点与方法,深入探讨了bang-bang控制、P控制等核心概念,并强调了实践前的预习准备。课程旨在培养自学能力和适应技术发展的能力。
本课程聚焦于使用Arduino搭建小车的技术细节,涵盖从微观到宏观的知识点与方法,深入探讨了bang-bang控制、P控制等核心概念,并强调了实践前的预习准备。课程旨在培养自学能力和适应技术发展的能力。
理论课程本周结束。课程全部资源,查看机器人控制器编程课程专题,链接如下:
自学能力是大学课程的核心与关键,也是终身学习的必备要素。

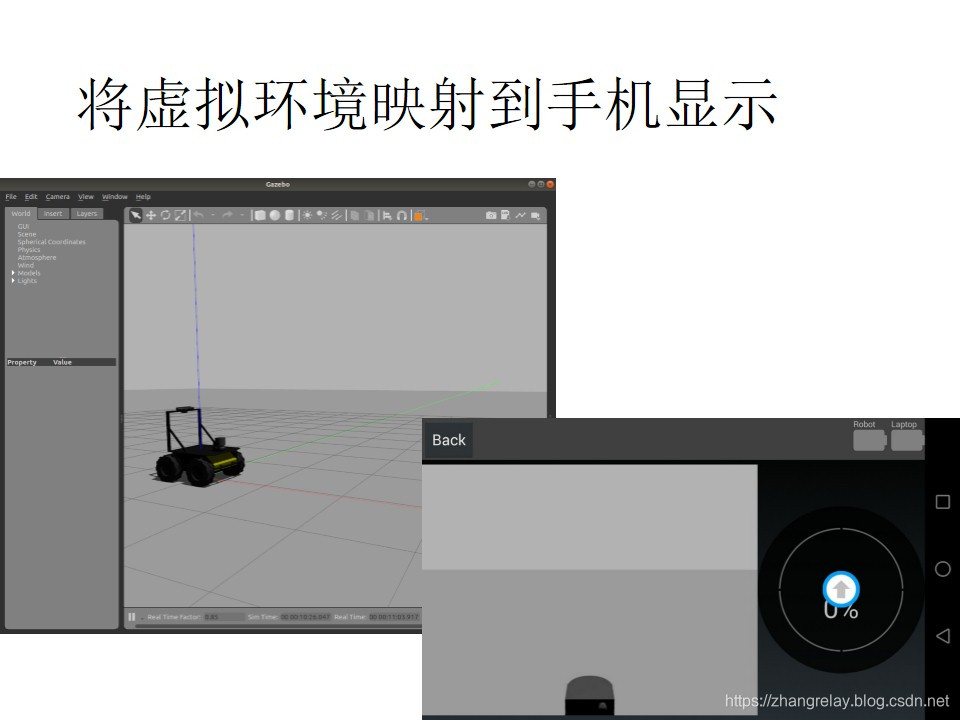
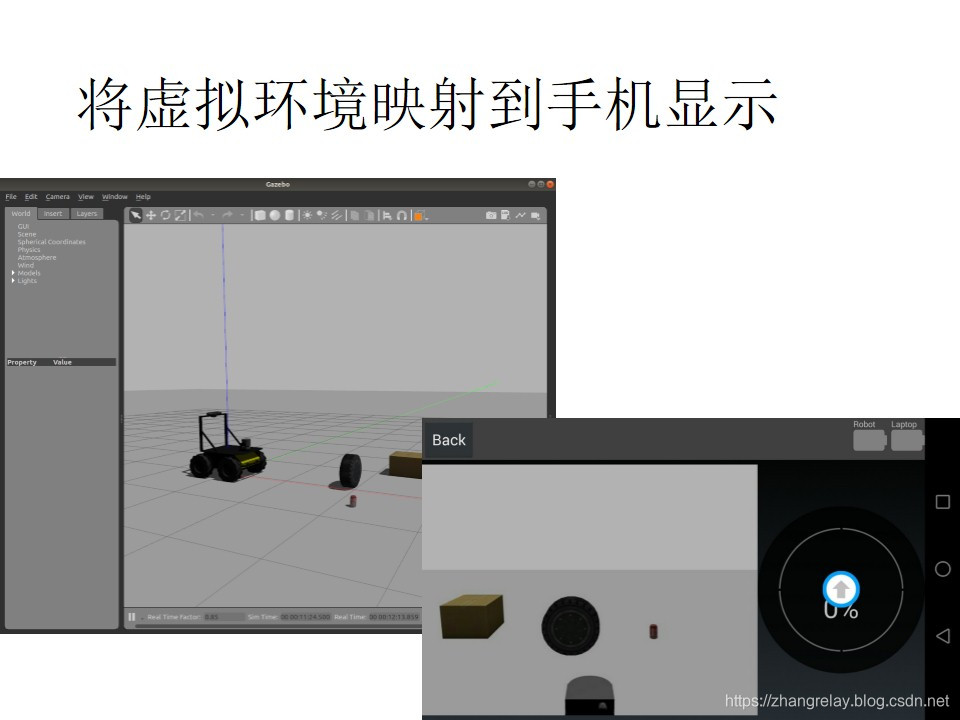
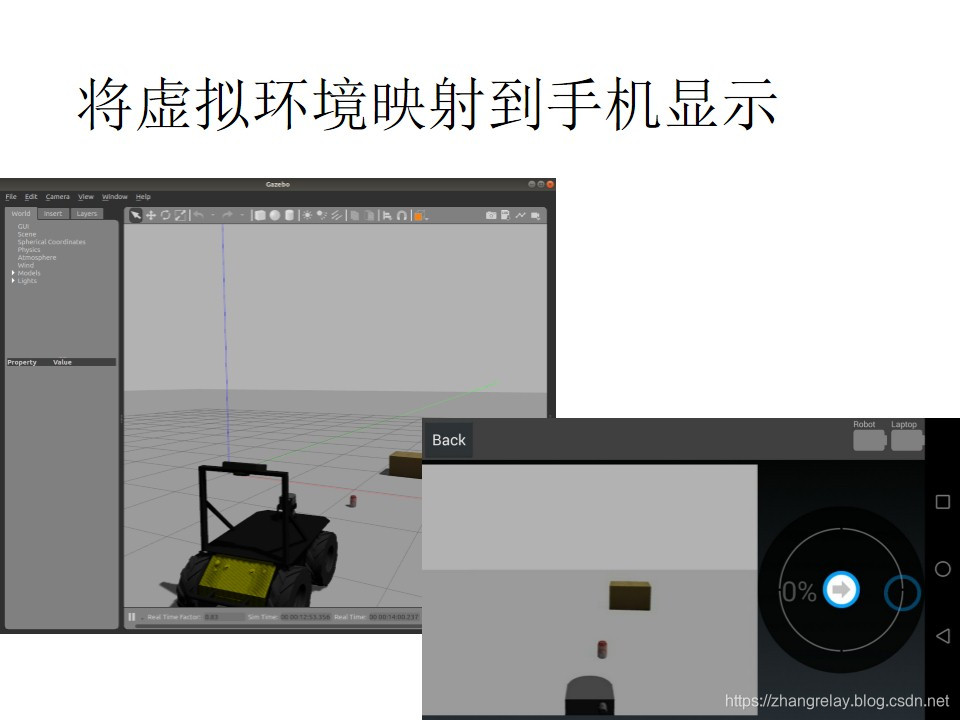
课程讲述了,使用arduino搭建如上图所示小车的一些微观和宏观知识点和方法。
下面的PPT已经在课堂上全部讲过:
01
02
03

04 学习需要与时俱进!!!
05 如果能掌握“一生二,二生三,三生万物”,技能点才是真正Get!!!
06
07 bang-bang 控制
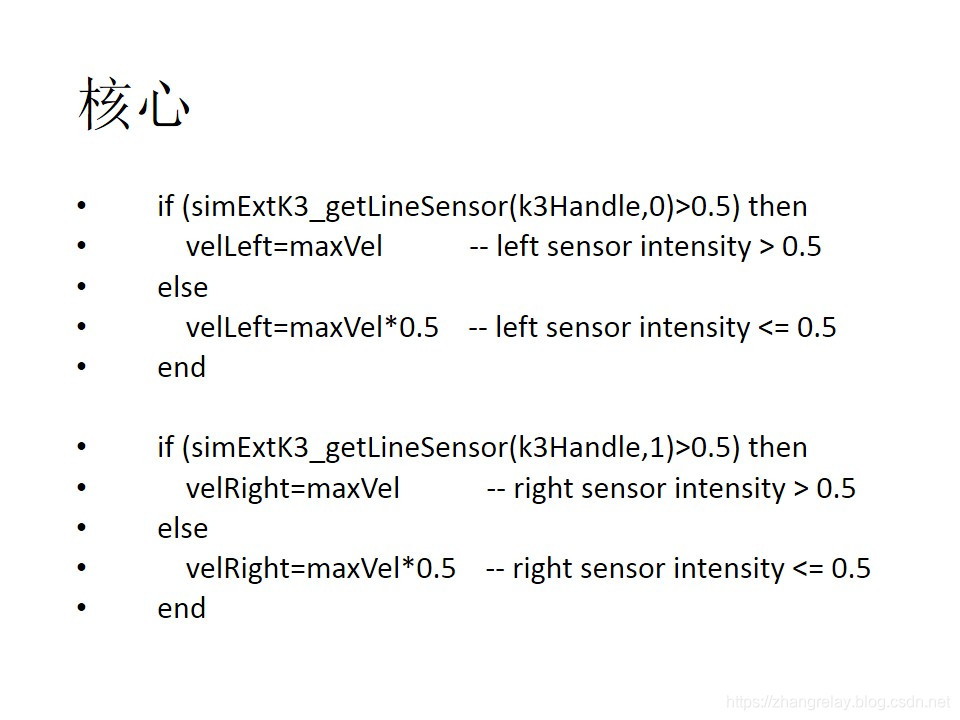
08
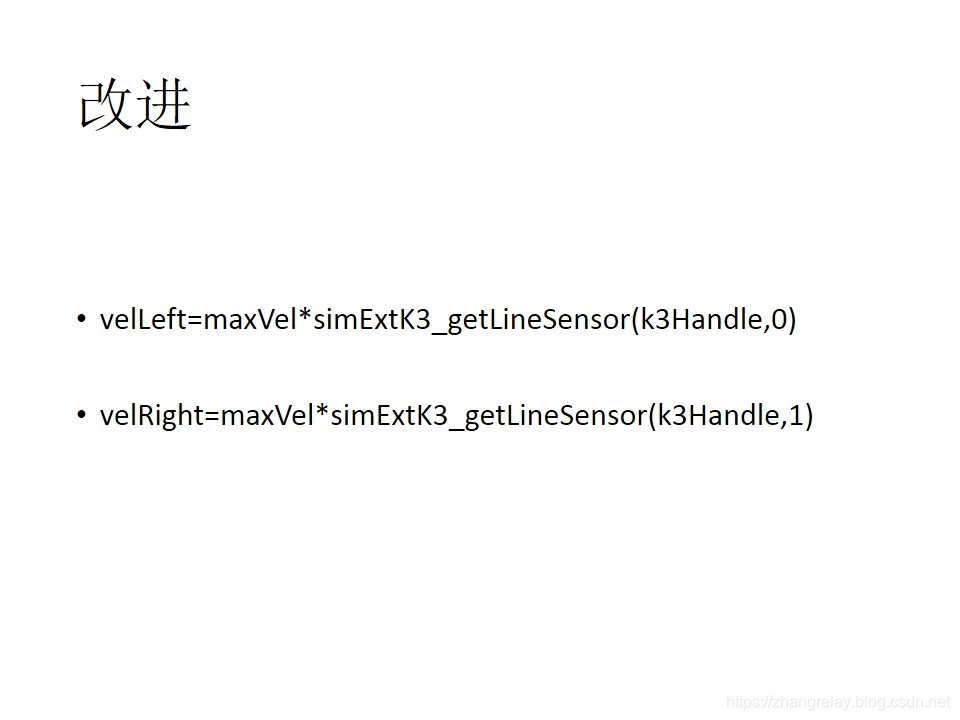
09 P控制
10 继续发现问题???
11
12
13
14
15
16
17
18

19
20
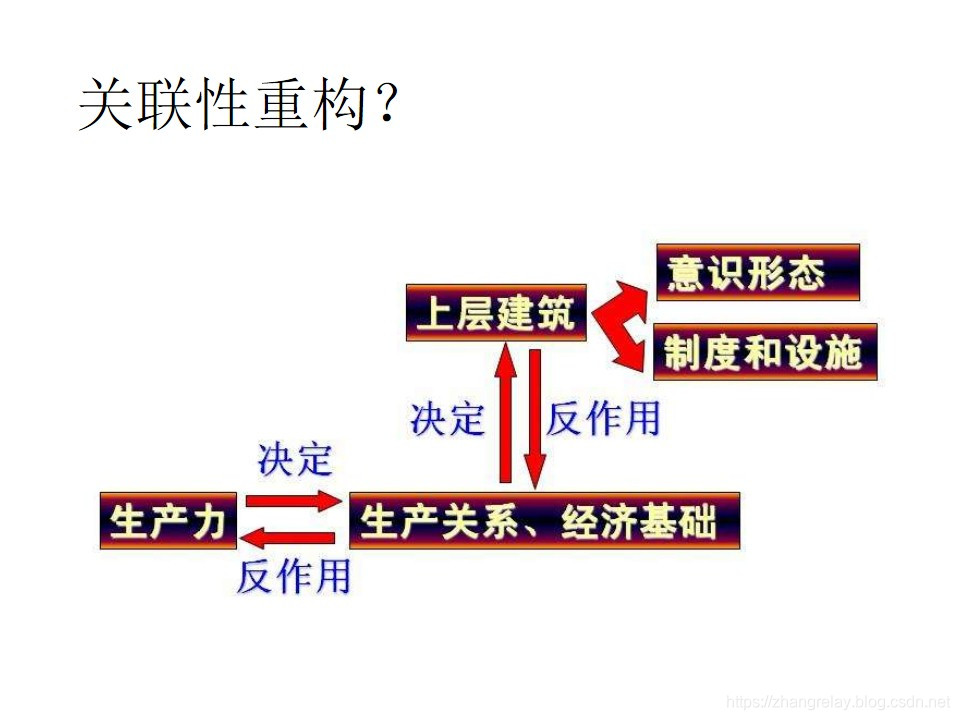
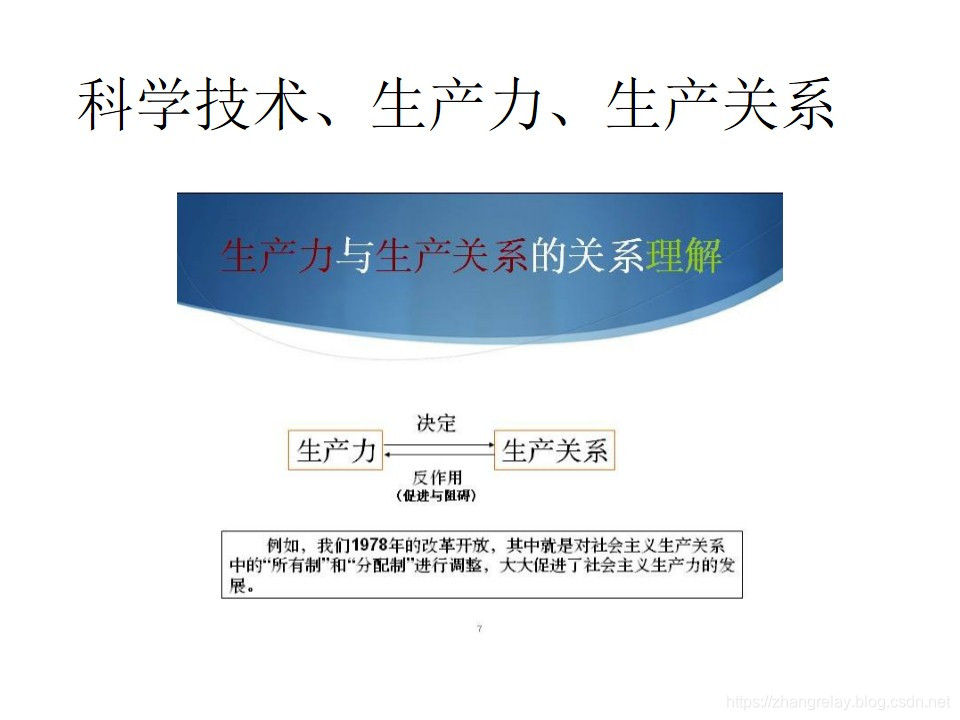
21 生产力发展-->生产关系复杂化-->产生阶级-->需要法律工具维护稳定!!!
22
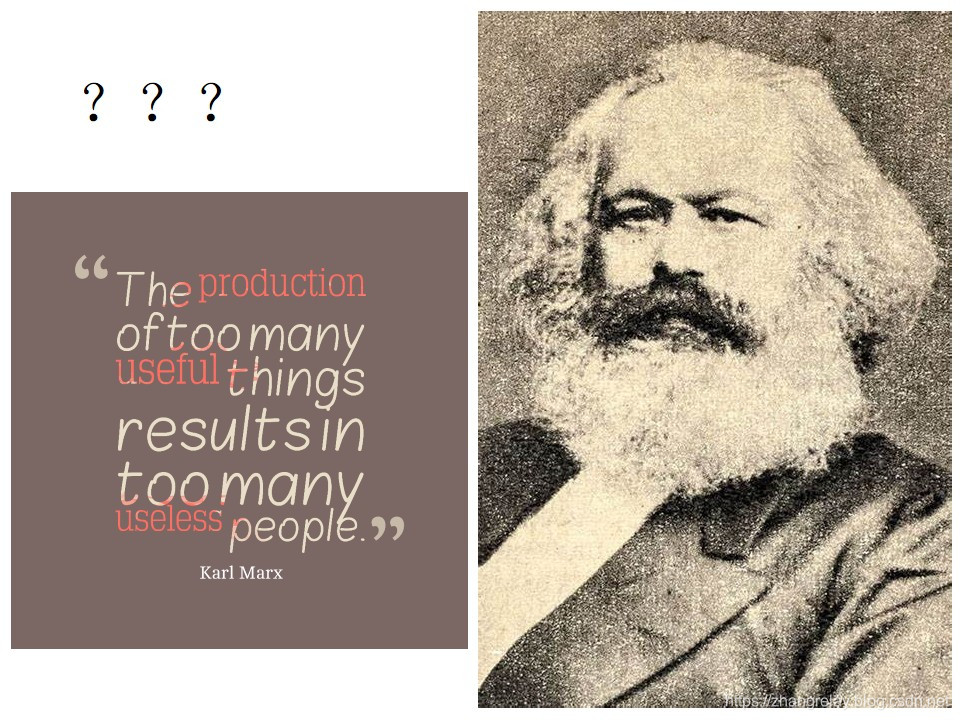
23 当机器人生产力超过部分人类,一定在越来越多的岗位上替代人!!!

24 如果变成如下漫画所展示的情景……
25

26
27
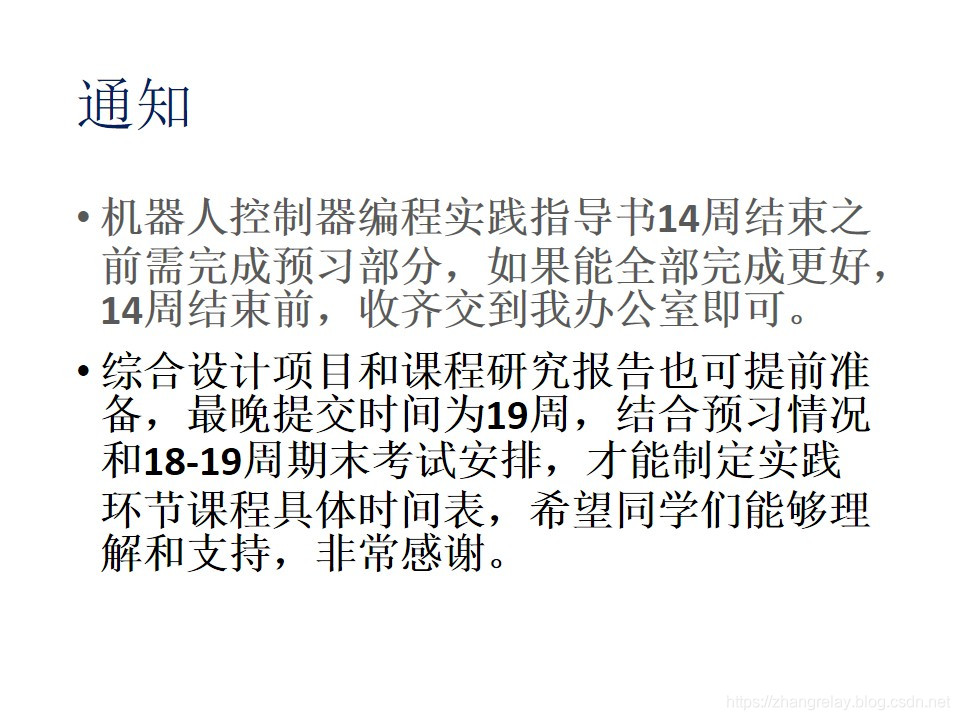
28 在实践课之前,需要完成预习
29 结束语
我们生活在一个人工智能时代;
一个蒙娜丽莎都能开口说话的神奇时代!
~Fin~



















 5137
5137



 到【灌水乐园】发言
到【灌水乐园】发言









