




4.1 Launch Demo
现在我们可以来尝试运行moveit了!
复制代码
|
1
|
roslaunch lwr_moveit_config demo.launch
|
等待几秒,当看到 All is well! Everyone is happy! You can start planning now! 的时候,就代表启动成功了。我们可以看到一个Rivz窗口,左下角有一个运动规划MotionPlanning模块。
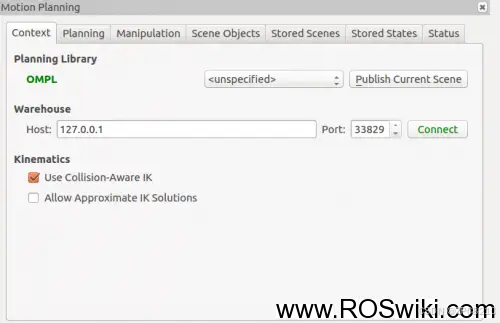
第一个进入视野的就是Planning Library, OMPL。没错,这里告诉你当前用的是OMPL运动规划算法。在中间的下来菜单里面有很多的具体算法,之后你可以尝试不同的算法,看看他们的区别。
4.2 选择目标位姿
如果如上文第二章中设置,你会在rviz主窗口中看到一个互动标记位于机械臂终端位置。移动这个标记到另外一个地方,你可以看到一个橙色的目标位姿(
每一次移动标记,就运行了一次逆运动学IK求解过程)。
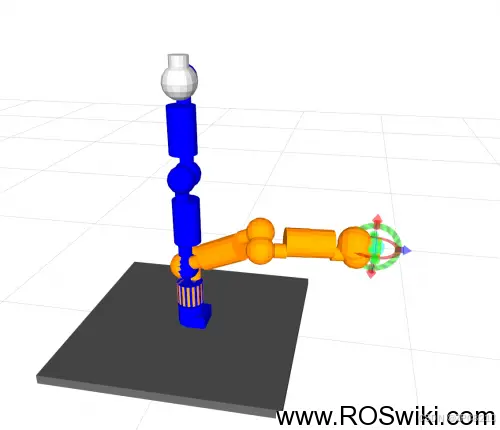
同样的,你也可以在MotionPlanning模块下的Planning子模块写的Query子模块里面设置随机的或者预设的目标位置。
4.3 运动规划终于,到了运动规划的时候了。。在Planning子模块中单击Plan,一个运动轨迹就会出现与Rviz窗口中并循环播放。你可以在Display->MotionPlanning->Planned Path里面设置各种显示参数。
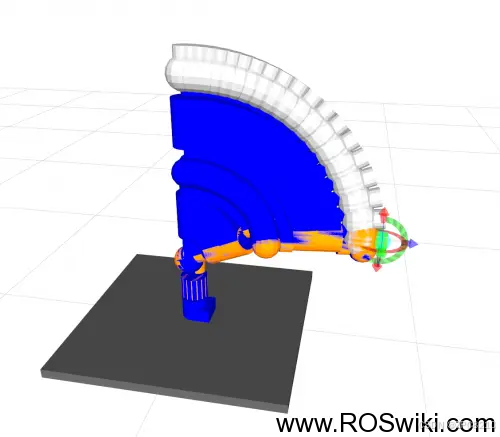
同时,在terminal里面我们可以看到一些输出
复制代码
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
[ INFO] [1453481861.884163555]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884336258]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884489778]: LBKPIECE1: Starting planning with 1 states already in datastructure
[ INFO] [1453481861.884523826]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884547702]: LBKPIECE1: Starting planning with 1 states already in datastructure
[ INFO] [1453481861.884564358]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884587404]: LBKPIECE1: Starting planning with 1 states already in datastructure
[ INFO] [1453481861.884604829]: LBKPIECE1: Attempting to use default projection.
[ INFO] [1453481861.884626253]: LBKPIECE1: Starting planning with 1
|
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1051
1051

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









