




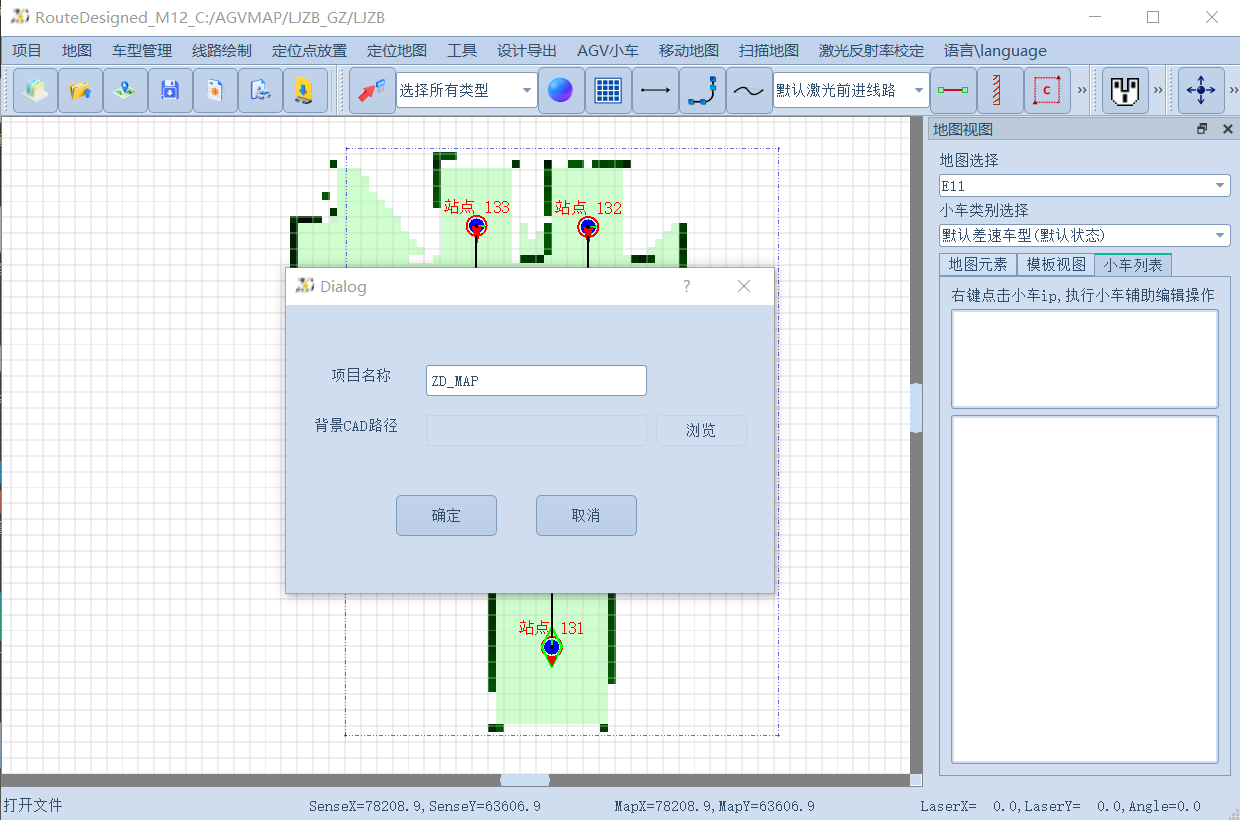
1-新建项目
点击菜单【项目】->【新建项目】,弹出“项目对话框”,输入要新建的项目名称。
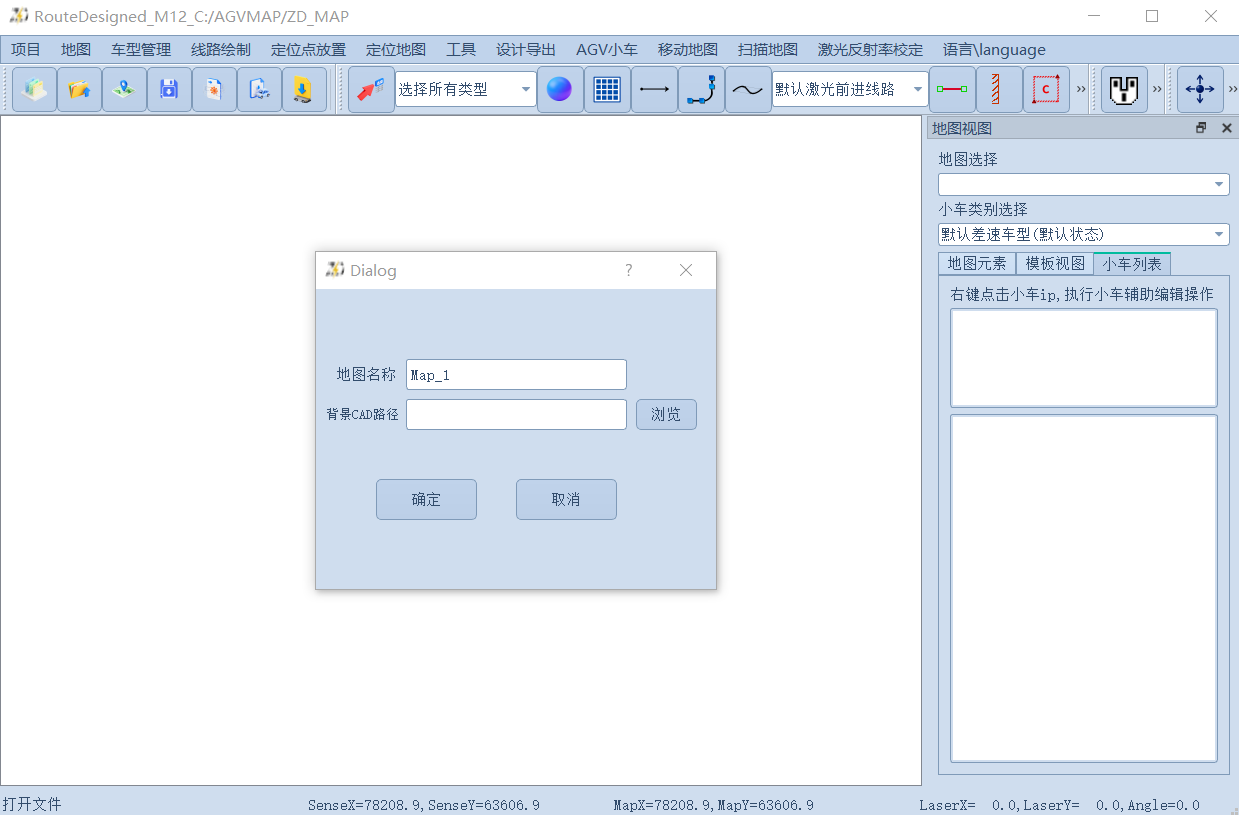
2-添加地图白板
点击菜单【地图】->【新建地图】,弹出“地图白板对话框”,输入要添加的地图名称。
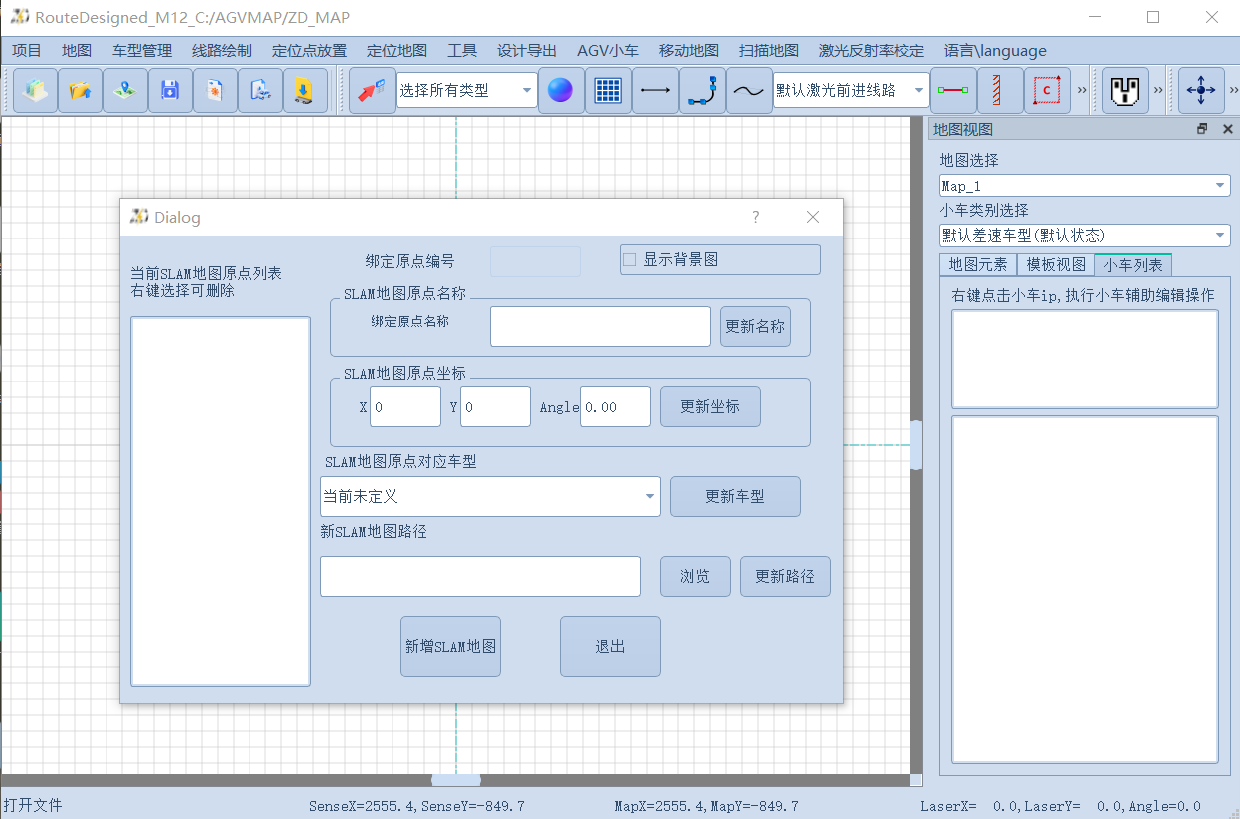
3-在地图白板中添加激光地图
点击菜单【定位地图】->【激光SLAM地图载入】,弹出“激光地图对话框”,输入要修改的激光地图信息。
- SLAM地图原点名称:与地图名相同即可。
- SLAM地图原点坐标:可以通过调整X、Y、角度可以在全局地图中将加入的激光地图方向调整到合适的角度和位置。
- SLAM地图原点对应车型:可以选择差速或者舵轮
- 新SLAM地图路径:为激光地图添加地图背景
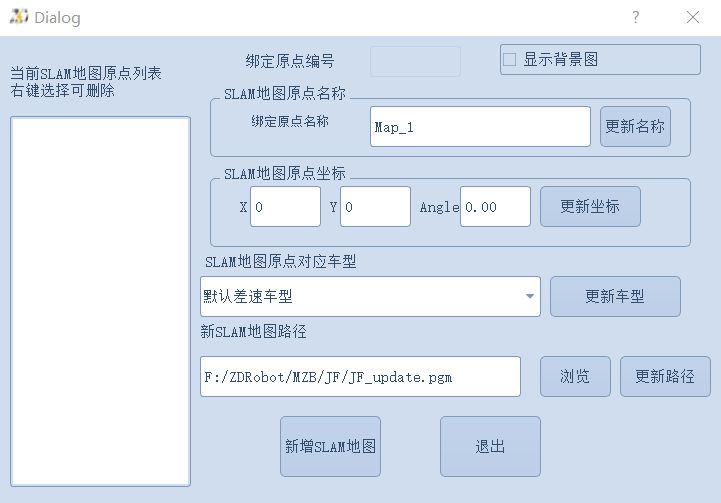
4-设置激光地图属性及背景图片
点击【新增SLAM地图】按钮添加激光地图。
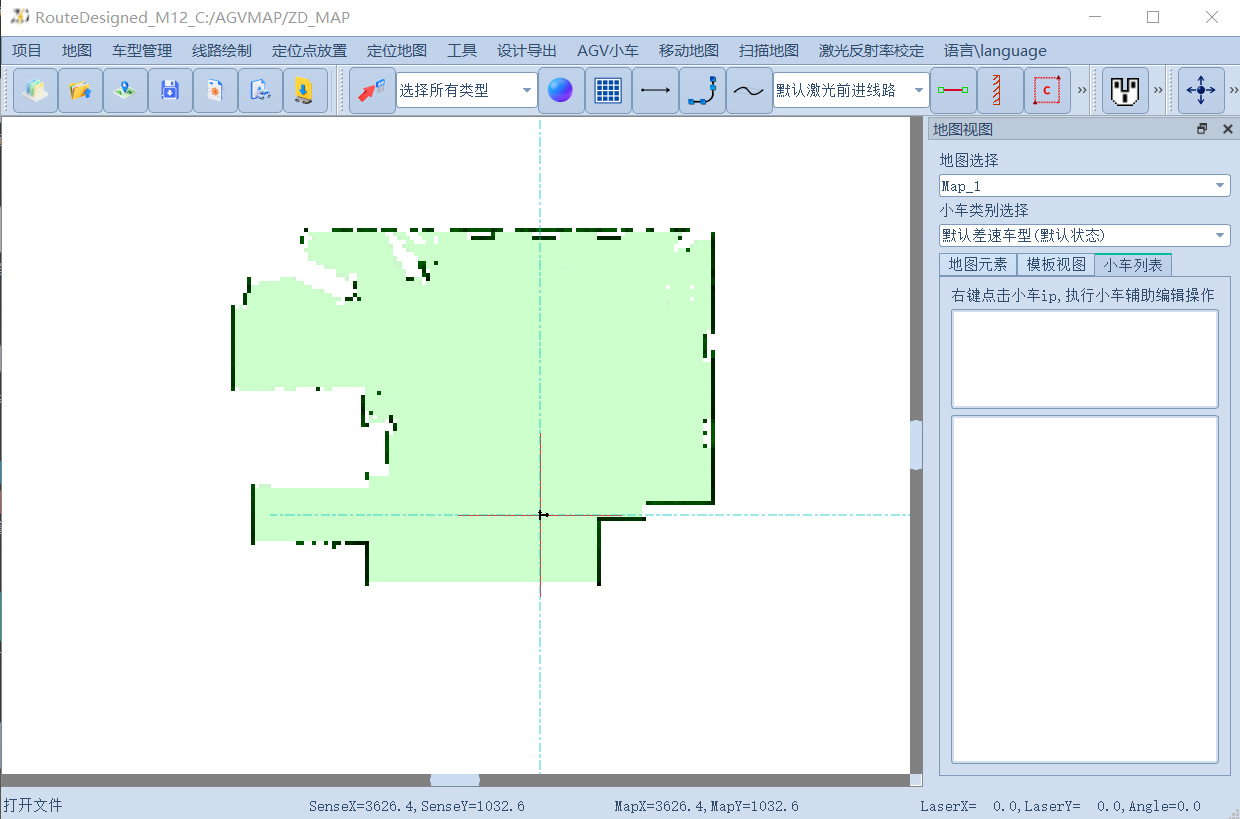
5-激光地图加入后的地图显示
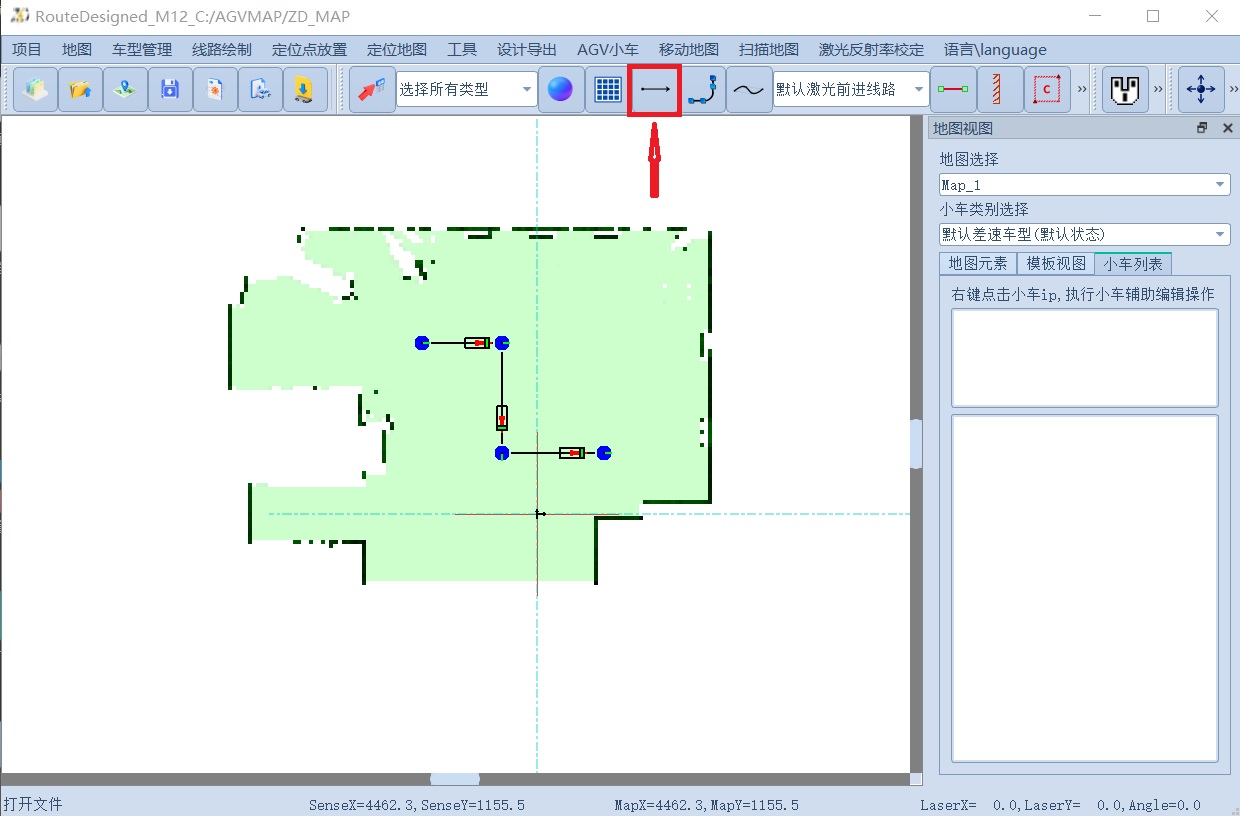
6-绘制AGV行进路线
点击菜单【线路绘制】->【绘制直行直线】,或者在工具栏选择该功能,然后在激光地图上点击鼠标左键绘制直行路线。
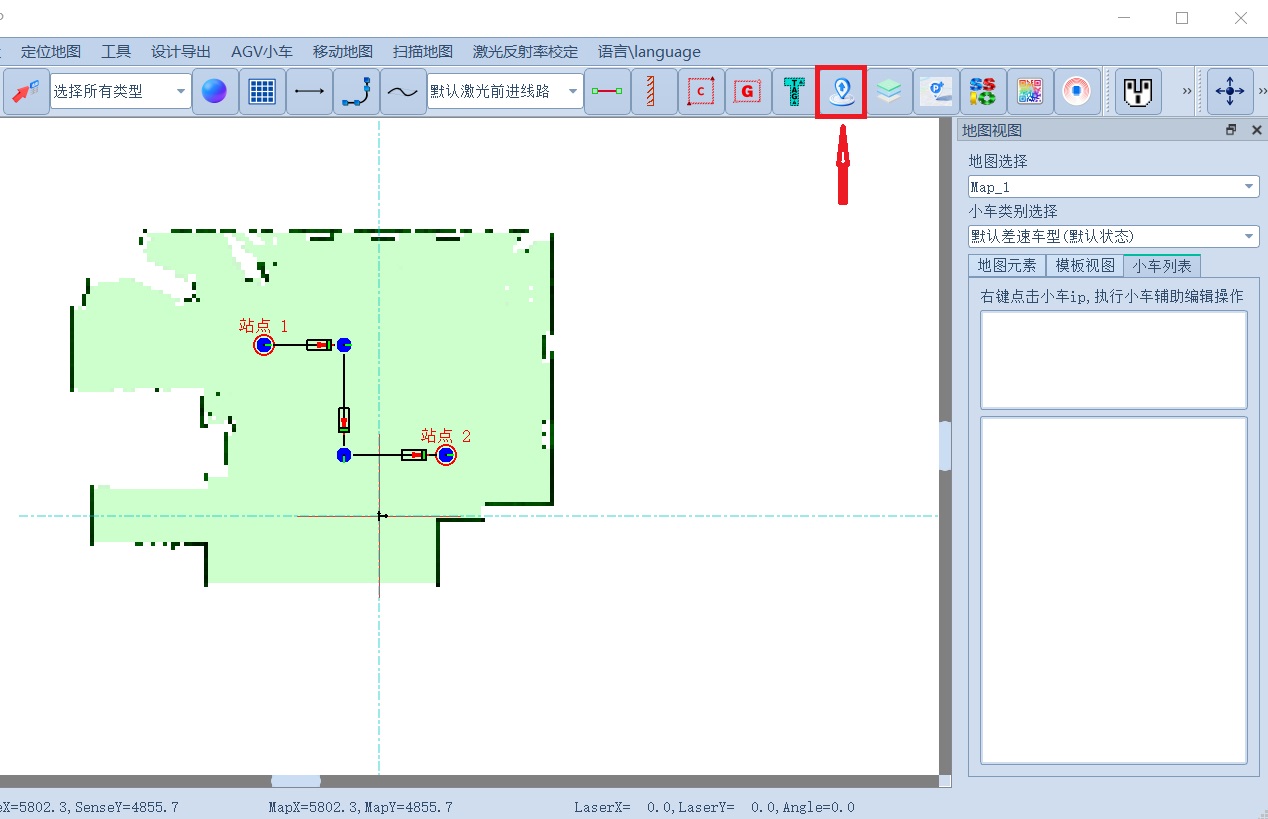
7-蓝色节点上添加AGV站台
点击菜单【线路绘制】->【添加站台】,或者在工具栏选择该功能,然后在激光地图的蓝色节点上点击鼠标左键添加。
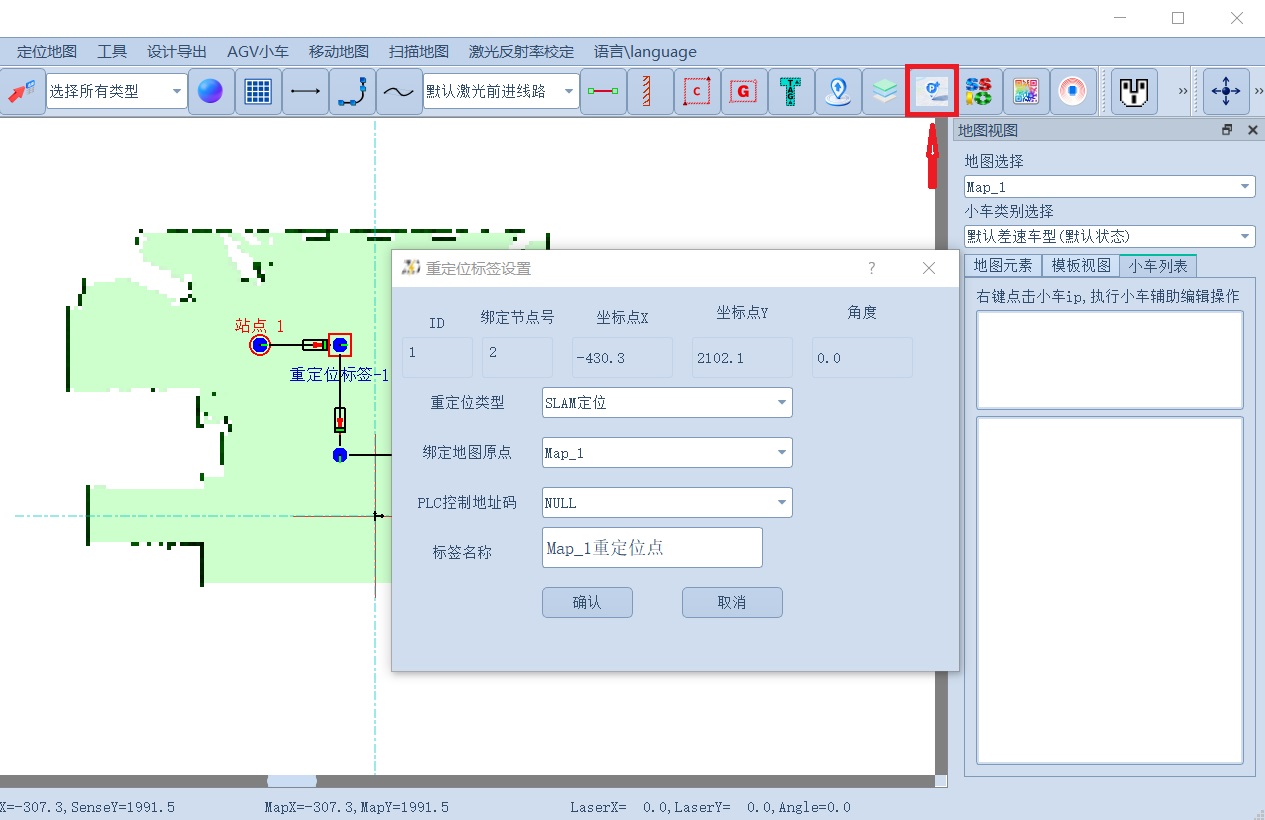
8-蓝色节点上添加激光重定位标签
点击菜单【线路绘制】->【添加位置定位标签】,或者在工具栏选择该功能,然后在激光地图的蓝色节点上点击鼠标左键添加。
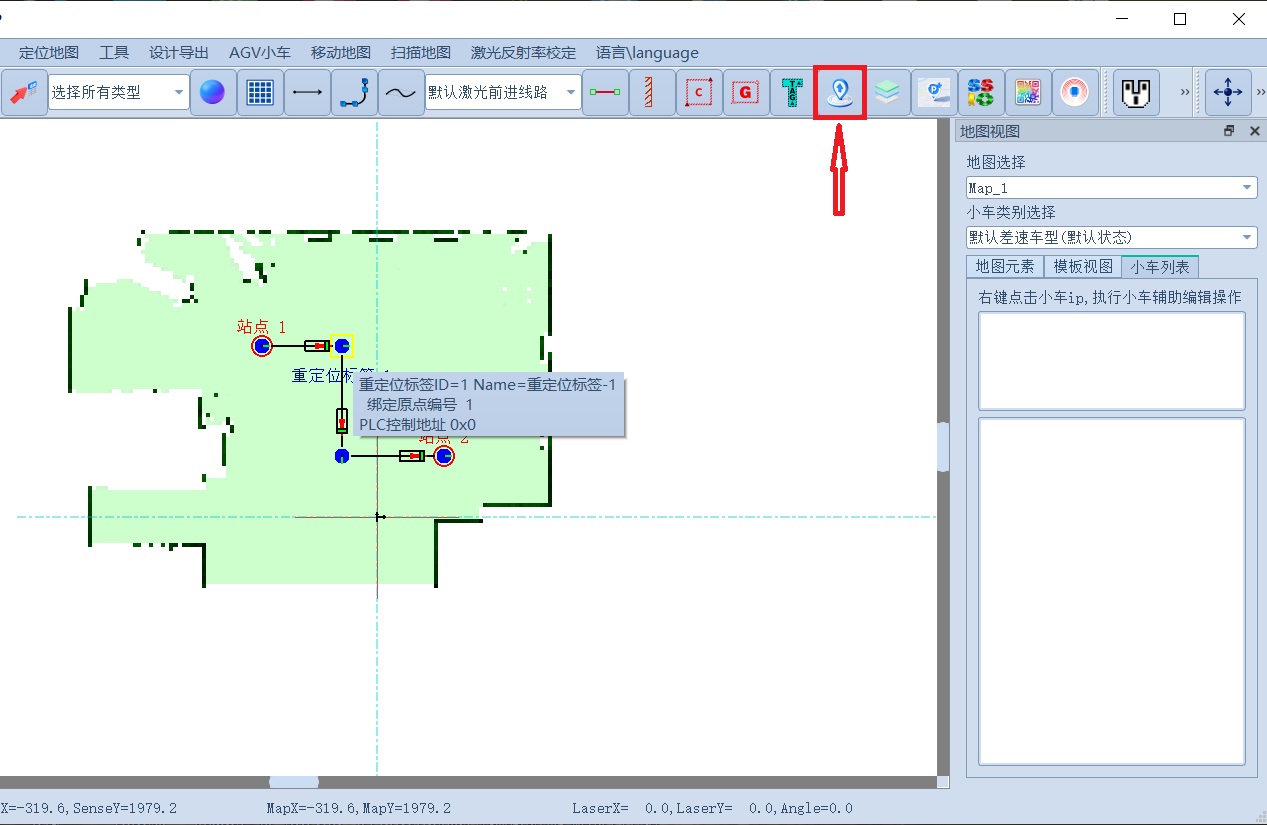
添加重定位标签后,移动鼠标触碰到重定位标签,然后双击,弹出重定位标签对话框:
9-鼠标右键添加AGV返回路线
上面只绘制了前进路线,现在将鼠标移动到路线上,然后点击鼠标右键,

选择添加返回路线。
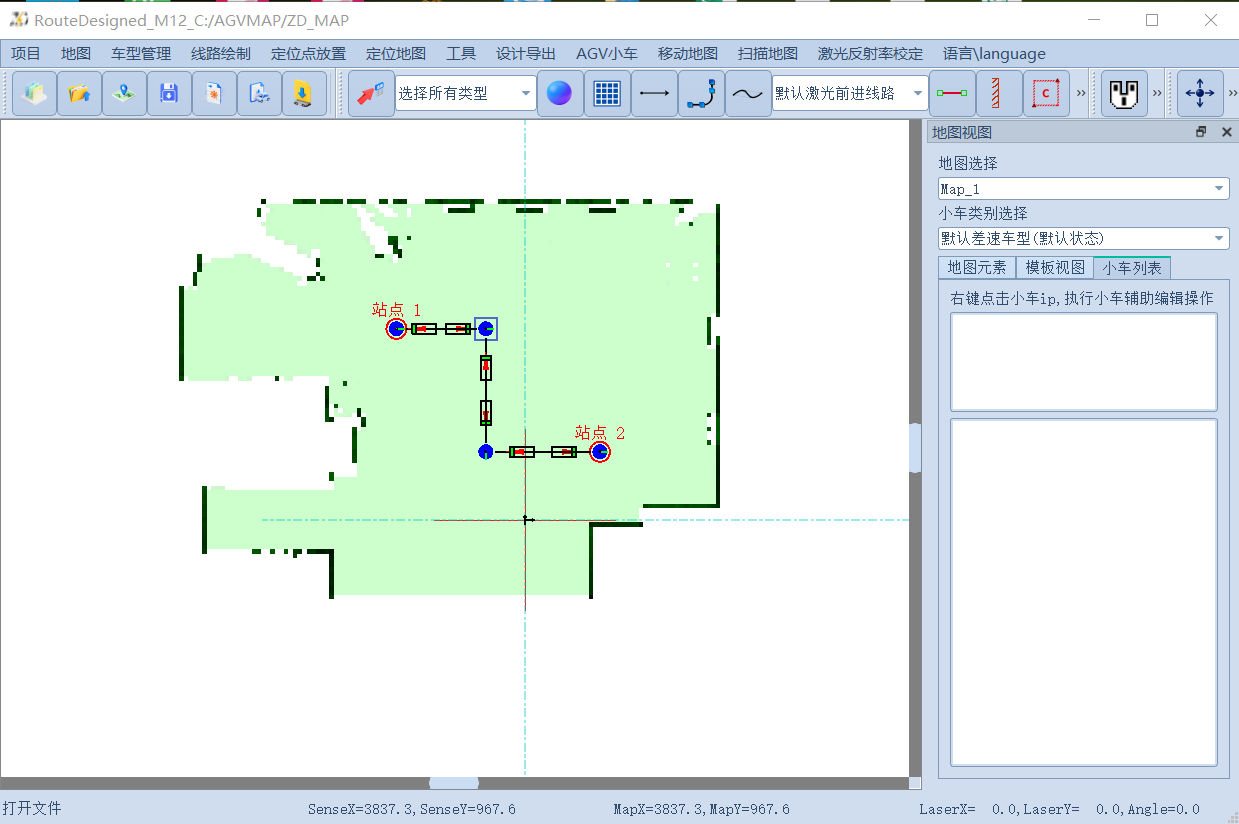
10-简单的路线绘制结果
上面的操作,我们绘制了一个简单的激光导航路线,可以使用激光重定位功能让AGV定位上线,然后就可以发布让AGV从站点1移动到站点2的路线任务。最后的绘制如下:
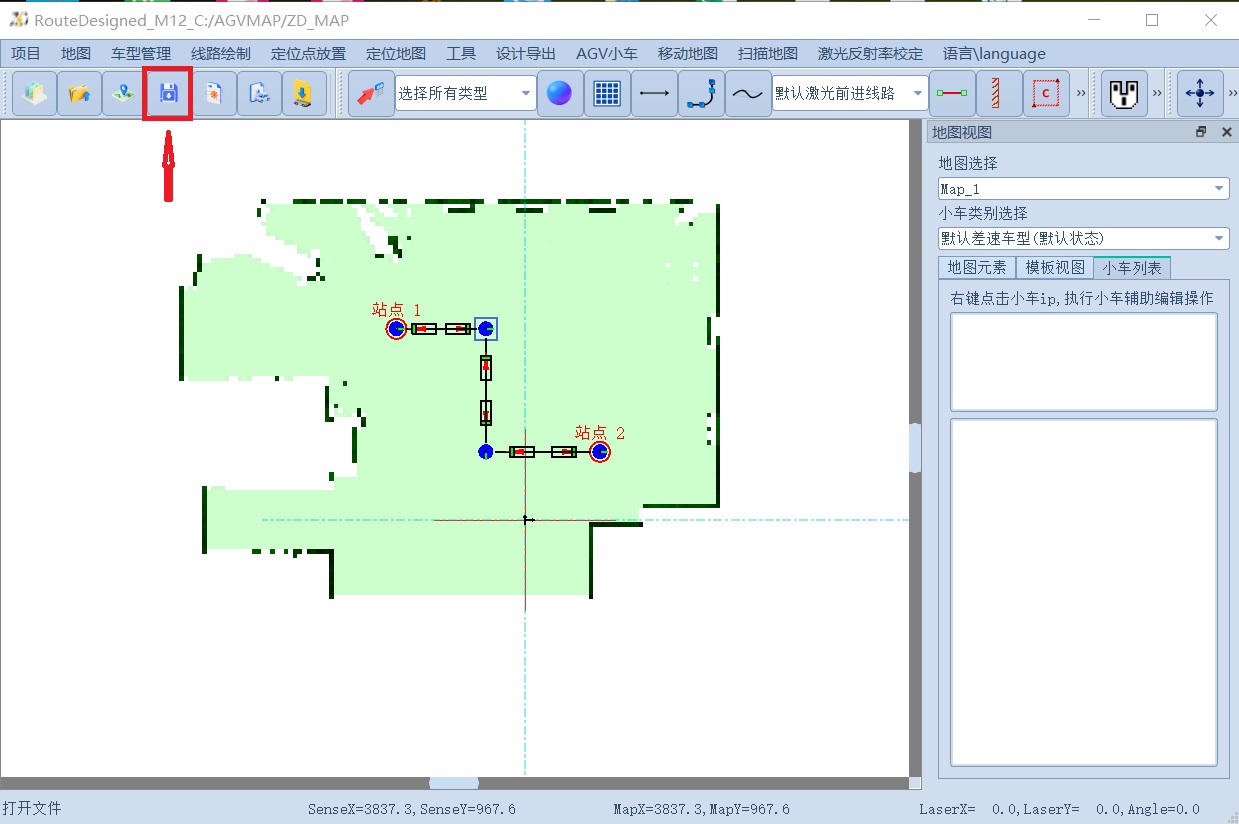
11-保存项目
点击菜单【项目】->【保存项目】,就可保存我们之前的所有操作,作为给到AGV小车和调度系统的路线信息。
更加更富的功能也敬请期待!

















 1160
1160

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









