







 超级会员免费看
超级会员免费看
 本文详细介绍了本质矩阵的推导过程,本质矩阵是基本矩阵的一种特殊情况,用于描述两幅图像间的关系,尤其是相机在归一化坐标系下的旋转和平移。通过8个对应点可求解本质矩阵,opencv库提供了便捷的实现。同时,文章还探讨了本质矩阵与基本矩阵的区别,后者包含了相机内参数信息。
本文详细介绍了本质矩阵的推导过程,本质矩阵是基本矩阵的一种特殊情况,用于描述两幅图像间的关系,尤其是相机在归一化坐标系下的旋转和平移。通过8个对应点可求解本质矩阵,opencv库提供了便捷的实现。同时,文章还探讨了本质矩阵与基本矩阵的区别,后者包含了相机内参数信息。
前言
两幅视图存在两个关系:第一种,通过对极几何,一幅图像上的点可以确定另外一幅图像上的一条直线;另外一种,通过上一种映射,一幅图像上的点可以确定另外一幅图像上的点,这个点是第一幅图像通过光心和图像点的射线与一个平面的交点在第二幅图像上的影像。第一种情况可以用基本矩阵来表示,第二种情况则用单应矩阵来表示。而本质矩阵则是基本矩阵**的一种特殊情况,是在归一化图像坐标系下的基本矩阵。
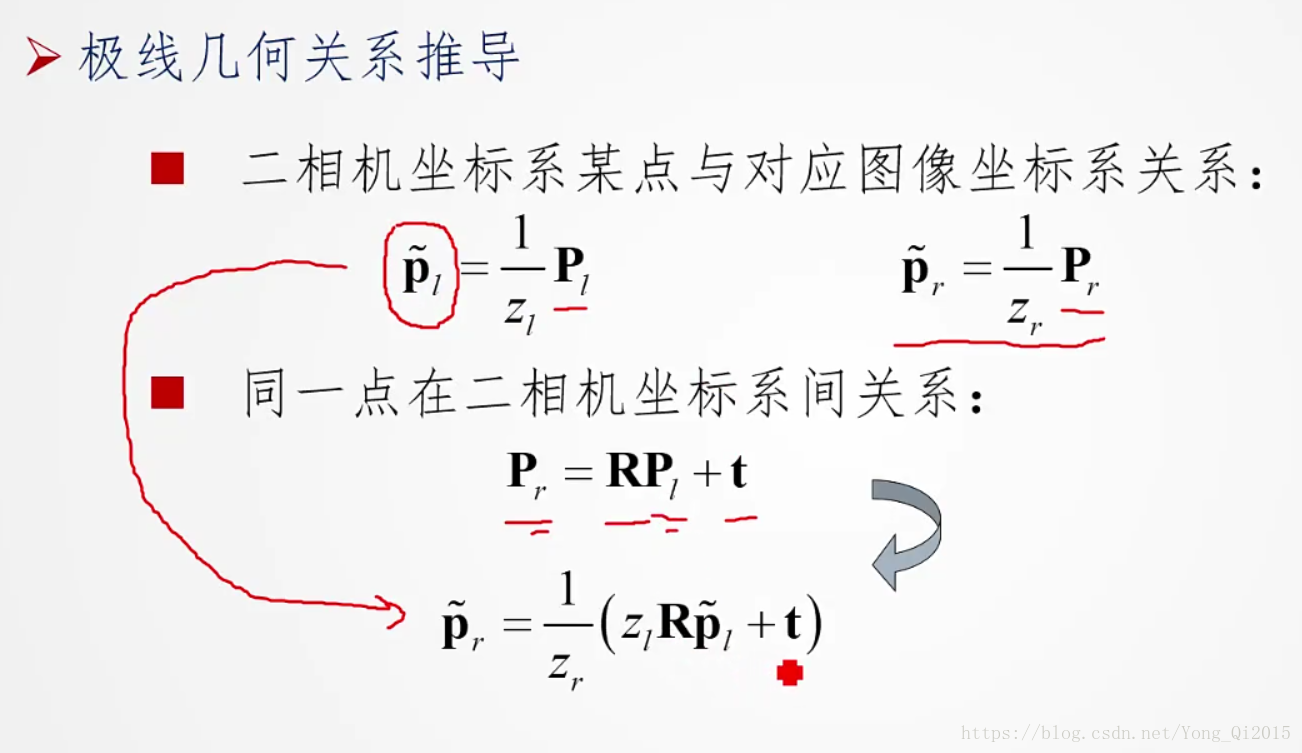
一 本质矩阵如何推导
推导过程梳理如下:


两幅视图存在两个关系:第一种,通过对极几何,一幅图像上的点可以确定另外一幅图像上的一条直线;另外一种,通过上一种映射,一幅图像上的点可以确定另外一幅图像上的点,这个点是第一幅图像通过光心和图像点的射线与一个平面的交点在第二幅图像上的影像。第一种情况可以用基本矩阵来表示,第二种情况则用单应矩阵来表示。而本质矩阵则是基本矩阵**的一种特殊情况,是在归一化图像坐标系下的基本矩阵。
推导过程梳理如下:
 2320
1393
973
421
2万+
2320
1393
973
421
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























