







 超级会员免费看
超级会员免费看
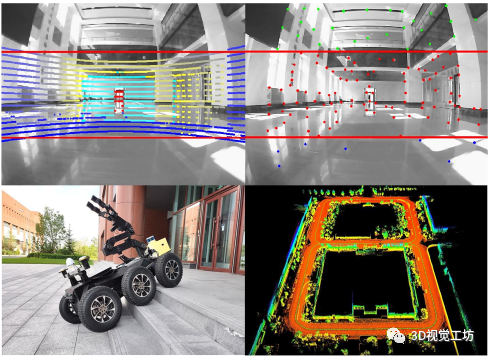
 本文介绍了一种针对地面机器人的多传感器融合SLAM系统,融合了IMU、轮速计、视觉、LiDAR和GNSS数据,通过因子图优化模型实现高鲁棒性和低漂移。该系统可在多种传感器退化场景下工作,实现在室内、地下、露天草坪和校园场景的广泛测试,表现出优越的性能。
本文介绍了一种针对地面机器人的多传感器融合SLAM系统,融合了IMU、轮速计、视觉、LiDAR和GNSS数据,通过因子图优化模型实现高鲁棒性和低漂移。该系统可在多种传感器退化场景下工作,实现在室内、地下、露天草坪和校园场景的广泛测试,表现出优越的性能。
来源:GR-Fusion Multi-Sensor Fusion SLAM for Ground Robots with High Robustness and Low Drift IROS 2021
单位:中科院沈阳自动化研究所
针对问题:
针对地面机器人的多传感器融合SLAM系统
提出方法:
系统融合紧耦合IMU、轮速计、视觉、LiDAR和GNSS多源观测信息,并结合地面机器人平面运动约束,构建了融合多模态观测信息的因子图优化模型,针对各种传感器退化场景提出了有效的运动退化检测方法,使得系统能够在复杂环境中仍保持较强的鲁棒性和较低的漂移。
达到效果:
所提出系统在室内数据集、地下数据集、开放式草坪数据集以及校园场景数据集中进行了广泛测试,与现有方案对比达到了最先进的效果。数据集开源地址https://driv

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 128
128

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











