




 ROS网络由主节点和从节点构成,主节点作为通信桥梁。MATLAB可以作为主节点或从节点注册。ROS主节点有ROSMasterIP、ROSHostName和ROSURI三种表示方式。通过rosinit函数和setenv配合,MATLAB能加入ROS网络。本文介绍了如何使用rosinit建立网络连接。
ROS网络由主节点和从节点构成,主节点作为通信桥梁。MATLAB可以作为主节点或从节点注册。ROS主节点有ROSMasterIP、ROSHostName和ROSURI三种表示方式。通过rosinit函数和setenv配合,MATLAB能加入ROS网络。本文介绍了如何使用rosinit建立网络连接。
目录
版本说明
Liunx端:Ubuntu18.04+ROS melodic
Windows端:Matlab2020b
ROS Network
ROS通信简介
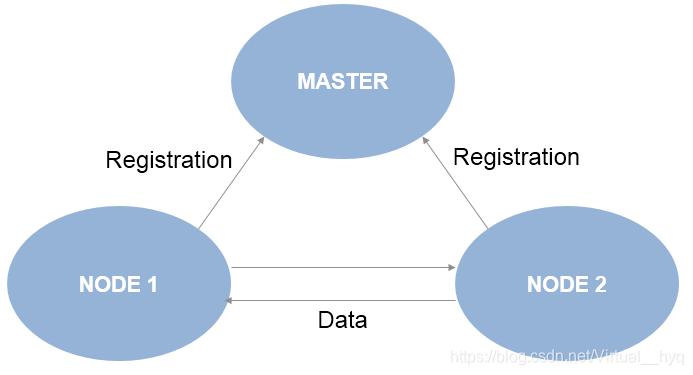
在ROS网络中,存在一个主节点和多个从节点。主节点是作为从节点通信的桥梁,其他从节点都必须在主节点注册(register),才能和其他从节点进行通信。Matlab可作为主节点,也可作为从节点。下图为ROS通信机制示意图。
ROS主节点表示方式
ROS Master Node有三种表示方式,分别为:ROS Master IP、ROS Master Node Computer Host Name、ROS Master Node URI(Uniform Resource Identifier)
三种表示方式示例如下:
ROS IP = '192.168.1.1'
ROS Host Name = 'master_host'
ROS URI = 'http://192.168.1.1:11311'注:11311为ROS标准port
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 972
972

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









