







 超级会员免费看
超级会员免费看
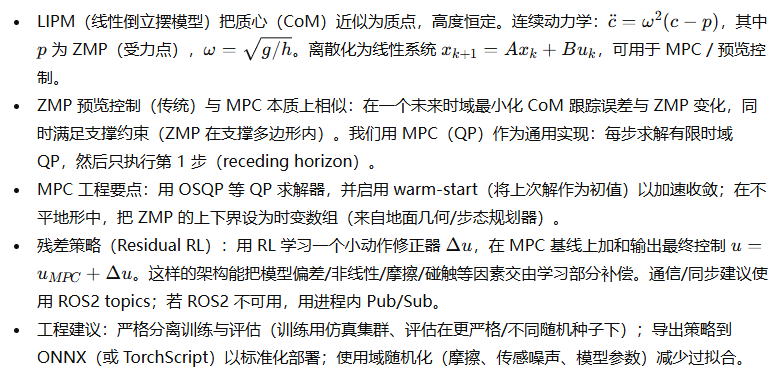
简短原理(高密度)
运行说明(先读)
-
保存下面代码为
walking_balance_demo.py。 -
安装依赖(最小):
pip install numpy可选(推荐,可获得更好性能):
pip install osqp scipy若想启用 ROS2 同步(可选):
pip install rclpy # 需已安装 ROS2 环境 -
运行演示(命令行):
python walking_balance_demo.py --episodes 40 --horizon 40加速使用 osqp:
pip install osqp scipy python walking_balance_demo.py --use_osqp -
输出将显示 MPC-only 与 MPC+Residual 的简单性能比较(轨迹误差与

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1869
1869

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









