





1. 初始化项目结构
首先,我们在文件系统中建立骨架。
Bash
mkdir -p pnn-project/src/pnn
mkdir -p pnn-project/src/utils
mkdir -p pnn-project/tests
touch pnn-project/src/pnn/__init__.py
2. 核心模块实现:src/pnn/kernels.py
这是 PNN 的数学核心。为了保证数值稳定性,我们强烈建议在 Log Domain (对数域) 进行计算,防止高维数据下的下溢(Underflow)。
Python
import numpy as np
def gaussian_kernel_log(dist_sq: np.ndarray, sigma: float) -> np.ndarray:
"""
计算高斯核的对数概率密度 (Log PDF)。
Formula: -d^2 / (2 * sigma^2) - log(sigma) - 0.5 * log(2 * pi)
Args:
dist_sq: 距离的平方矩阵 (Squared Euclidean distance)
sigma: 带宽参数
"""
# 忽略常数项 -0.5 * log(2 * pi) 在比较时通常可以抵消,但为了严谨这里加上
normalization = np.log(sigma) + 0.5 * np.log(2 * np.pi)
return - (dist_sq / (2 * sigma**2)) - normalization
def student_t_kernel_log(dist_sq: np.ndarray, sigma: float, df: float = 3.0) -> np.ndarray:
"""
计算 Student-t 核的对数概率密度 (用于重尾分布)。
Formula: log(Gamma((v+1)/2)) - log(Gamma(v/2)) - 0.5*log(v*pi) - log(sigma) - (v+1)/2 * log(1 + d^2/(v*sigma^2))
这里为了计算速度,我们可以简化关注核心变化部分。
"""
# 简化版核心部分 (假设常数项在 Softmax 中会被抵消)
# log(1 + d^2 / (v * sigma^2)) ^ (-(v+1)/2)
# -> - (v+1)/2 * log(1 + d^2 / (v * sigma^2))
inner = 1 + dist_sq / (df * sigma**2)
return - (df + 1) / 2 * np.log(inner)
def laplacian_kernel_log(dist: np.ndarray, sigma: float) -> np.ndarray:
"""
拉普拉斯核 (L1 distance sensitive)。
Formula: - |d| / sigma - log(2 * sigma)
"""
return - (dist / sigma) - np.log(2 * sigma)
3. 经典 PNN 实现:src/pnn/classic_pnn.py
我们将实现一个高度向量化的版本。核心逻辑利用 scipy.spatial.distance.cdist 快速计算距离矩阵,并使用 LogSumExp 技巧处理概率求和。
Python
import numpy as np
from scipy.spatial.distance import cdist
from scipy.special import logsumexp
from sklearn.base import BaseEstimator, ClassifierMixin
from sklearn.utils.validation import check_X_y, check_array, check_is_fitted
from typing import Optional, Union
from src.pnn.kernels import gaussian_kernel_log
class ClassicPNN(BaseEstimator, ClassifierMixin):
"""
经典概率神经网络 (Probabilistic Neural Network)
实现了基于 Log-Domain 的 Parzen Window 估计,防止数值下溢。
"""
def __init__(self, sigma: float = 1.0, kernel: str = 'gaussian', priors: Optional[dict] = None):
"""
Args:
sigma: 平滑参数 (Bandwidth/Std dev)
kernel: 'gaussian' (目前支持)
priors: 类别先验权重字典 {class_label: weight},默认为 None (根据训练集频率自动计算)
"""
self.sigma = sigma
self.kernel = kernel
self.priors = priors
def fit(self, X, y):
"""
PNN 的训练过程本质上就是存储模式样本。
"""
X, y = check_X_y(X, y)
self.classes_ = np.unique(y)
self.X_train_ = X
self.y_train_ = y
# 按类别组织数据,以便后续快速索引
self.class_indices_ = {c: np.where(y == c)[0] for c in self.classes_}
# 计算先验概率 P(C_k)
if self.priors is None:
self.class_priors_ = {c: len(idx) / len(y) for c, idx in self.class_indices_.items()}
else:
total_weight = sum(self.priors.values())
self.class_priors_ = {c: w / total_weight for c, w in self.priors.items()}
return self
def predict_log_proba(self, X):
"""
计算各类别的对数后验概率 log P(C_k | x)
"""
check_is_fitted(self)
X = check_array(X)
n_samples = X.shape[0]
n_classes = len(self.classes_)
log_probs = np.zeros((n_samples, n_classes))
# 预计算所有测试样本与所有训练样本的距离矩阵
# 注意:对于海量数据,这里需要改为分批次计算 (Batch Processing) 以免内存爆炸
# metric='sqeuclidean' 对应高斯核所需的 d^2
full_dists = cdist(X, self.X_train_, metric='sqeuclidean')
for i, c in enumerate(self.classes_):
# 获取属于类别 c 的训练样本的索引
c_indices = self.class_indices_[c]
# 提取对应的距离子矩阵 (Test_Size, Class_Train_Size)
dists_c = full_dists[:, c_indices]
# 1. 计算核函数响应 (Log Domain)
# log(K(d))
kernel_log_vals = gaussian_kernel_log(dists_c, self.sigma)
# 2. 求和 (Parzen Window Summation) -> LogSumExp
# sum_prob = sum(exp(log_k)) -> log(sum_prob) = logsumexp(log_k)
# axis=1 表示对该类别的所有训练样本求和
log_density = logsumexp(kernel_log_vals, axis=1)
# 3. 归一化项 (1/N_c)
# P(x|C_k) = (1/N_c) * Sum(K)
# log P(x|C_k) = log(Sum(K)) - log(N_c)
n_class_samples = len(c_indices)
log_likelihood = log_density - np.log(n_class_samples)
# 4. 加上先验 log P(C_k)
# log P(C_k|x) propto log P(x|C_k) + log P(C_k)
log_probs[:, i] = log_likelihood + np.log(self.class_priors_[c])
# 计算 Softmax 归一化常数 (Evidence P(x))
# P(C_k|x) = exp(numerator) / sum(exp(numerators))
log_evidence = logsumexp(log_probs, axis=1, keepdims=True)
return log_probs - log_evidence
def predict_proba(self, X):
return np.exp(self.predict_log_proba(X))
def predict(self, X):
log_proba = self.predict_log_proba(X)
indices = np.argmax(log_proba, axis=1)
return self.classes_[indices]
4. 简单的验证脚本 (Smoke Test)
创建一个简单的脚本来验证第一阶段的功能是否正常。
tests/test_classic_pnn.py
Python
import numpy as np
import sys
import os
# 将 src 加入路径
sys.path.append(os.path.abspath(os.path.join(os.path.dirname(__file__), '../src')))
from pnn.classic_pnn import ClassicPNN
from sklearn.datasets import make_classification
from sklearn.metrics import accuracy_score
import matplotlib.pyplot as plt
def test_pnn_basic():
# 1. 生成模拟数据
X, y = make_classification(n_samples=200, n_features=2, n_redundant=0,
n_informative=2, n_clusters_per_class=1, random_state=42)
# 2. 初始化 PNN (Sigma 决定了决策边界的平滑程度)
pnn = ClassicPNN(sigma=0.5)
# 3. 训练
pnn.fit(X, y)
# 4. 预测
y_pred = pnn.predict(X)
probs = pnn.predict_proba(X)
acc = accuracy_score(y, y_pred)
print(f"Classic PNN Training Accuracy: {acc:.4f}")
print(f"Sample Probabilities:\n{probs[:5]}")
assert acc > 0.85, "Accuracy is too low, check logic."
print("Test Passed!")
if __name__ == "__main__":
test_pnn_basic()
5. 自适应 PNN:src/pnn/adaptive_pnn.py

Python
import numpy as np
from sklearn.neighbors import NearestNeighbors
from scipy.special import logsumexp
from sklearn.utils.validation import check_X_y, check_array, check_is_fitted
from src.pnn.classic_pnn import ClassicPNN
from scipy.spatial.distance import cdist
class AdaptivePNN(ClassicPNN):
"""
自适应带宽概率神经网络 (Adaptive PNN)
每个训练样本拥有独立的 Sigma,基于其局部密度(kNN距离)计算。
"""
def __init__(self, k_neighbors: int = 5, method: str = 'kth_distance', min_sigma: float = 1e-3, priors=None):
"""
Args:
k_neighbors: 计算局部密度时参考的邻居数量
method: 'kth_distance' (使用第k个邻居的距离) | 'mean_distance' (前k个的平均距离)
min_sigma: 防止 sigma 为 0 (当有重复样本时)
"""
super().__init__(sigma=1.0, priors=priors) # sigma在这里只是占位符
self.k_neighbors = k_neighbors
self.method = method
self.min_sigma = min_sigma
def fit(self, X, y):
X, y = check_X_y(X, y)
self.classes_ = np.unique(y)
self.X_train_ = X
self.y_train_ = y
self.class_indices_ = {c: np.where(y == c)[0] for c in self.classes_}
# 计算先验
if self.priors is None:
self.class_priors_ = {c: len(idx) / len(y) for c, idx in self.class_indices_.items()}
else:
total = sum(self.priors.values())
self.class_priors_ = {c: w/total for c, w in self.priors.items()}
# === 核心差异:预计算每个训练样本的 Sigma ===
# 使用 KNN 算法查找每个样本的邻居
nbrs = NearestNeighbors(n_neighbors=self.k_neighbors, algorithm='auto').fit(X)
distances, _ = nbrs.kneighbors(X)
# distances shape: (n_samples, k_neighbors)
# column 0 is distance to self (0.0), so we look at columns 1 to k
if self.method == 'kth_distance':
# 使用第 k 个邻居的距离作为 sigma
# distances[:, -1] 即第 k 个邻居 (索引从0开始,kneighbors返回k个)
self.sigmas_ = distances[:, -1]
elif self.method == 'mean_distance':
self.sigmas_ = np.mean(distances[:, 1:], axis=1)
else:
raise ValueError(f"Unknown method: {self.method}")
# 安全限制:防止 sigma 过小导致数值爆炸
self.sigmas_ = np.maximum(self.sigmas_, self.min_sigma)
# 预计算 Log Sigma 项 (用于 PDF 归一化)
# Gaussian PDF factor: 1 / (sigma * sqrt(2pi))^d
# Log factor: -d * log(sigma) ... (这里我们只针对每个样本做修正)
# 注意:标准公式里,不同维度的 sigma 处理不同。这里简化为各项同性高斯。
# P(x) = (1/N) * sum [ (1/sigma_i^d) * K((x-xi)/sigma_i) ]
# Log domian: - d * log(sigma_i) + log_kernel
self.d_dim_ = X.shape[1]
return self
def predict_log_proba(self, X):
check_is_fitted(self)
X = check_array(X)
n_test = X.shape[0]
n_classes = len(self.classes_)
log_probs = np.zeros((n_test, n_classes))
# 计算距离矩阵 (Test x Train)
# 优化建议:大数据集应分块计算
full_dists_sq = cdist(X, self.X_train_, metric='sqeuclidean')
for i, c in enumerate(self.classes_):
c_idx = self.class_indices_[c]
# 获取该类别样本的距离矩阵 (N_test, N_class_train)
dists_sq_c = full_dists_sq[:, c_idx]
# 获取该类别训练样本对应的 sigmas (N_class_train,)
sigmas_c = self.sigmas_[c_idx]
# === 自适应核计算 ===
# Broadcasting: (N_test, N_train) / (N_train,)
# Term 1: - dist^2 / (2 * sigma_i^2)
term1 = - dists_sq_c / (2 * (sigmas_c ** 2)[None, :])
# Term 2: Normalization per sample (feature dimension d)
# - d * log(sigma_i)
term2 = - self.d_dim_ * np.log(sigmas_c)[None, :]
# Combine: log_pdf_contributions
# 忽略常数 -0.5 * d * log(2pi) 因为对所有类都一样,比较时不影响
log_contributions = term1 + term2
# LogSumExp over training samples
log_density = logsumexp(log_contributions, axis=1)
# Normalized by number of training samples in this class
log_likelihood = log_density - np.log(len(c_idx))
log_probs[:, i] = log_likelihood + np.log(self.class_priors_[c])
log_evidence = logsumexp(log_probs, axis=1, keepdims=True)
return log_probs - log_evidence
6. 原型 PNN:src/pnn/prototype_pnn.py
Python
import numpy as np
from sklearn.cluster import KMeans, MiniBatchKMeans
from sklearn.utils.validation import check_X_y, check_is_fitted
from src.pnn.classic_pnn import ClassicPNN
from src.pnn.kernels import gaussian_kernel_log
from scipy.spatial.distance import cdist
from scipy.special import logsumexp
class PrototypePNN(ClassicPNN):
"""
原型 PNN (Prototype PNN / Condensed PNN)
使用 K-Means 对每类样本进行聚类,仅存储聚类中心(Prototypes)进行预测。
极大提升推理速度。
"""
def __init__(self, n_prototypes=10, sigma=1.0, priors=None):
"""
Args:
n_prototypes: 每个类别保留的原型数量 (可以是 int 或 dict {class: k})
"""
super().__init__(sigma=sigma, priors=priors)
self.n_prototypes = n_prototypes
def fit(self, X, y):
X, y = check_X_y(X, y)
self.classes_ = np.unique(y)
# 存储原型而非原始数据
self.prototypes_ = [] # List[ndarray]
self.prototype_labels_ = [] # List[int]
self.prototype_weights_ = [] # List[float] -> 实际上是 log weights
# 计算全局先验 (基于原始数据量)
raw_counts = {c: np.sum(y == c) for c in self.classes_}
total_samples = len(y)
if self.priors is None:
self.class_priors_ = {c: raw_counts[c] / total_samples for c in self.classes_}
else:
# ...同上... (略)
pass
# === 核心差异:逐类聚类 ===
self.class_proto_indices_ = {} # 用于预测时索引
current_idx = 0
all_protos = []
all_weights = []
for c in self.classes_:
X_c = X[y == c]
n_samples_c = X_c.shape[0]
# 确定该类的原型数量
k = self.n_prototypes
if isinstance(k, dict):
k = k.get(c, 5)
k = min(k, n_samples_c) # 防止原型数 > 样本数
# 执行聚类
kmeans = KMeans(n_clusters=k, n_init=5, random_state=42)
kmeans.fit(X_c)
centers = kmeans.cluster_centers_
# 计算每个原型的权重 (该聚类包含了多少原始样本)
# 这一步很关键:大簇应该有更大的影响力
labels = kmeans.labels_
_, counts = np.unique(labels, return_counts=True)
# 存储 Log Weights (便于后续计算)
# P(x|C) ~ sum( w_j * K(x, c_j) )
# 这里的 counts 就是 w_j
log_weights = np.log(counts)
start = current_idx
end = current_idx + k
self.class_proto_indices_[c] = (start, end)
current_idx = end
all_protos.append(centers)
all_weights.append(log_weights)
self.X_train_ = np.vstack(all_protos) # 这里存的是 Prototypes
self.proto_log_weights_ = np.concatenate(all_weights)
return self
def predict_log_proba(self, X):
"""
逻辑与 ClassicPNN 几乎一致,除了在求和时需要加上 prototype weights
"""
check_is_fitted(self)
n_test = X.shape[0]
n_classes = len(self.classes_)
log_probs = np.zeros((n_test, n_classes))
# 计算与所有 Prototype 的距离
full_dists = cdist(X, self.X_train_, metric='sqeuclidean')
for i, c in enumerate(self.classes_):
start, end = self.class_proto_indices_[c]
# 提取该类的 Prototype 距离
dists_c = full_dists[:, start:end]
# 提取该类的 Prototype 权重
weights_c = self.proto_log_weights_[start:end] # shape (n_proto,)
# 1. Kernel Response: log(K(d))
kernel_vals = gaussian_kernel_log(dists_c, self.sigma)
# 2. Weighted Sum: log( sum( w_j * exp(kernel_val) ) )
# -> logsumexp( log(w_j) + kernel_val )
# Broadcasting: (N_test, n_proto) + (n_proto,)
weighted_kernel = kernel_vals + weights_c[None, :]
log_density = logsumexp(weighted_kernel, axis=1)
# 3. 归一化: 除以该类原始总样本数 (sum of weights)
# 因为 weights 存的是 counts,sum(weights) = N_class_raw
# log(1/N_c)
n_class_raw = np.sum(np.exp(weights_c))
log_likelihood = log_density - np.log(n_class_raw)
log_probs[:, i] = log_likelihood + np.log(self.class_priors_[c])
log_evidence = logsumexp(log_probs, axis=1, keepdims=True)
return log_probs - log_evidence
7. Phase 2 验证脚本:性能对比
我们需要验证 Prototype PNN 确实变快了,且精度损失可控。
notebooks/demo_phase2_comparison.ipynb (逻辑代码):
Python
import time
from sklearn.datasets import make_moons
from sklearn.model_selection import train_test_split
from src.pnn.classic_pnn import ClassicPNN
from src.pnn.adaptive_pnn import AdaptivePNN
from src.pnn.prototype_pnn import PrototypePNN
# 1. 生成大数据集 (10k 样本)
X, y = make_moons(n_samples=10000, noise=0.3, random_state=42)
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2)
models = {
"Classic PNN (Full)": ClassicPNN(sigma=0.2),
"Adaptive PNN (k=10)": AdaptivePNN(k_neighbors=10),
"Prototype PNN (K=50)": PrototypePNN(n_prototypes=50, sigma=0.2) # 每类50个原型,共100个
}
results = []
for name, model in models.items():
# Train
t0 = time.time()
model.fit(X_train, y_train)
train_time = time.time() - t0
# Inference
t0 = time.time()
acc = model.score(X_test, y_test)
infer_time = time.time() - t0
results.append({
"Model": name,
"Accuracy": acc,
"Train Time": train_time,
"Infer Time": infer_time,
"Stored Samples": model.X_train_.shape[0]
})
import pandas as pd
print(pd.DataFrame(results))
预期结果:
-
Classic PNN:精度基准,推理时间最长(需计算 8000 个距离)。
-
Adaptive PNN:精度通常最高(适应性强),但训练时间稍长(需构建 kNN 索引)。
-
Prototype PNN:推理时间大幅缩短(仅需计算 100 个距离),精度略有下降但非常接近。
8. 概率多层感知机:src/pnn/probabilistic_mlp.py
工程注意:
Shutterstock
-
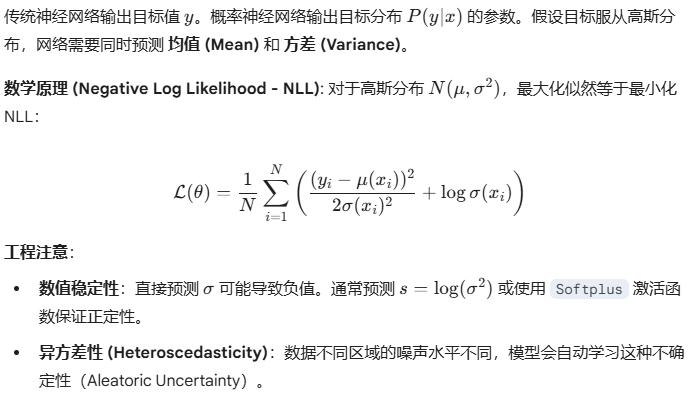
数值稳定性:直接预测 σ 可能导致负值。通常预测 s=log(σ2) 或使用
Softplus激活函数保证正定性。 -
异方差性 (Heteroscedasticity):数据不同区域的噪声水平不同,模型会自动学习这种不确定性(Aleatoric Uncertainty)。
Python
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
class ProbabilisticMLP(nn.Module):
"""
Probabilistic MLP for Regression.
Outputs: Mean (mu) and Log Standard Deviation (log_sigma).
捕捉数据本身的噪声 (Aleatoric Uncertainty)。
"""
def __init__(self, input_dim: int, hidden_dims: list = [64, 64]):
super().__init__()
layers = []
in_dim = input_dim
# 构建特征提取层 (Backbone)
for h_dim in hidden_dims:
layers.append(nn.Linear(in_dim, h_dim))
layers.append(nn.ReLU())
layers.append(nn.Dropout(0.1)) # Dropout 可选,用于 MC-Dropout 估计 Epistemic Uncertainty
in_dim = h_dim
self.feature_extractor = nn.Sequential(*layers)
# 双头输出 (Dual Head)
self.mu_head = nn.Linear(in_dim, 1) # 预测均值
self.log_sigma_head = nn.Linear(in_dim, 1) # 预测 log(sigma)
def forward(self, x):
features = self.feature_extractor(x)
mu = self.mu_head(features)
log_sigma = self.log_sigma_head(features)
# log_sigma 的范围约束是训练稳定的关键
# 有时会加上 torch.clamp(log_sigma, min=-5, max=5)
return mu, log_sigma
class GaussianNLLLoss(nn.Module):
"""
高斯负对数似然损失 (Heteroscedastic Loss)
Loss = 0.5 * exp(-2*log_sigma) * (y - mu)^2 + log_sigma
"""
def __init__(self):
super().__init__()
def forward(self, mu, log_sigma, target):
# 确保 target 维度匹配
if target.shape != mu.shape:
target = target.view(mu.shape)
# 计算方差 inverse variance: 1 / sigma^2 = exp(-2 * log_sigma)
inv_var = torch.exp(-2 * log_sigma)
loss = 0.5 * ( (mu - target)**2 * inv_var ) + log_sigma
return loss.mean()
9. 鲁棒 Student-t 输出层:src/pnn/tdist_pnn.py
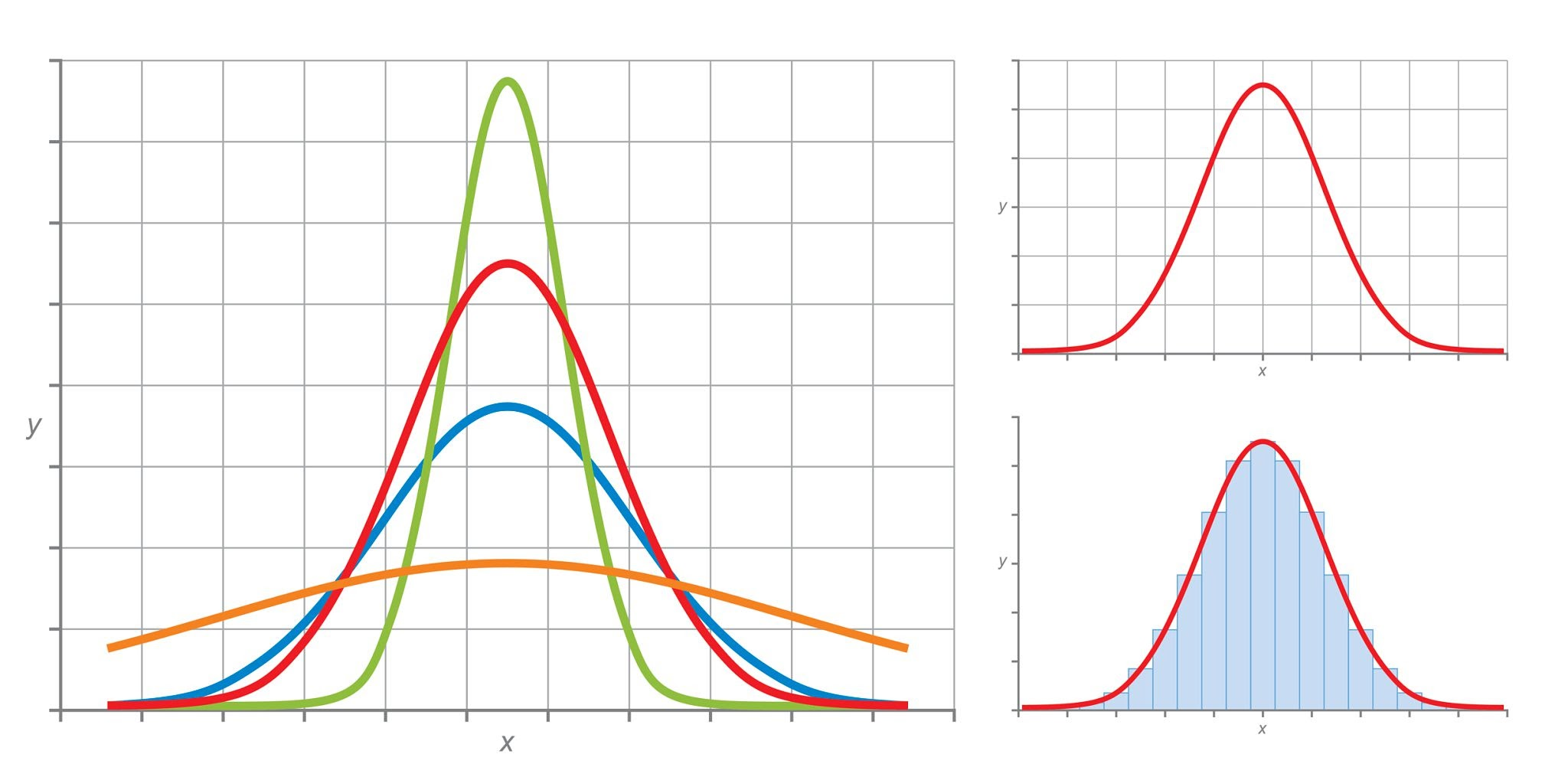
高斯分布对离群点(Outliers)非常敏感。如果数据中有脏数据,MSE(均方误差)会被拉偏。Student-t 分布具有“重尾”特性,对异常值更鲁棒。
![]()
import torch
import torch.nn as nn
class StudentTMLP(nn.Module):
"""
Robust Regression using Student-t distribution.
Outputs: mu, sigma, nu (degrees of freedom).
"""
def __init__(self, input_dim, hidden_dims=[64, 64]):
super().__init__()
# ... (特征提取部分同上) ...
layers = []
in_dim = input_dim
for h_dim in hidden_dims:
layers.append(nn.Linear(in_dim, h_dim))
layers.append(nn.ReLU())
in_dim = h_dim
self.feature_extractor = nn.Sequential(*layers)
self.mu_head = nn.Linear(in_dim, 1)
self.sigma_head = nn.Linear(in_dim, 1)
self.nu_head = nn.Linear(in_dim, 1) # 预测自由度
def forward(self, x):
features = self.feature_extractor(x)
mu = self.mu_head(features)
# Sigma 必须 > 0
sigma = F.softplus(self.sigma_head(features)) + 1e-6
# Nu 必须 > 2 (为了保证方差存在),通常约束在 [2, infinity)
# 实际训练中,nu 很难学,有时固定为 3.0 或 4.0 效果更好
nu = F.softplus(self.nu_head(features)) + 2.001
return mu, sigma, nu
def student_t_nll_loss(mu, sigma, nu, target):
"""
Student-t Negative Log Likelihood
公式较为复杂,包含 log-gamma 函数。
"""
y = target.view(mu.shape)
# 核心项:log(1 + (y-mu)^2 / (nu * sigma^2))
diff_sq = (y - mu)**2
term1 = torch.log(1 + diff_sq / (nu * sigma**2))
# 系数项
log_gamma_nu_plus_1_div_2 = torch.lgamma((nu + 1) / 2)
log_gamma_nu_div_2 = torch.lgamma(nu / 2)
log_prob = log_gamma_nu_plus_1_div_2 \
- log_gamma_nu_div_2 \
- 0.5 * torch.log(nu * np.pi) \
- torch.log(sigma) \
- (nu + 1) / 2 * term1
return -log_prob.mean()
10. Deep PNN (Deep Embedding + PNN):src/deep/deep_pnn.py
这是整个架构的集大成者。
-
前端:使用深度网络(如 CNN, ResNet, Transformer)提取 Embedding。
-
后端:使用 Phase 1/2 实现的
ClassicPNN或PrototypePNN进行非参数分类。
优势:
-
Few-shot Learning:一旦 Backbone 训练好(或使用预训练模型),PNN 只需要极少量样本即可通过存储原型建立分类器。
-
无需重新训练:增加新类别时,只需添加新样本到 PNN 的存储中,无需反向传播更新 Backbone。
Python
import torch
import numpy as np
from sklearn.base import BaseEstimator, ClassifierMixin
from typing import Union
from src.pnn.classic_pnn import ClassicPNN
from src.pnn.prototype_pnn import PrototypePNN
class DeepPNN(BaseEstimator, ClassifierMixin):
"""
Deep Probabilistic Neural Network.
Wraps a PyTorch backbone and a PNN estimator.
"""
def __init__(self, backbone: torch.nn.Module, pnn_head: Union[ClassicPNN, PrototypePNN],
device='cpu', batch_size=32):
"""
Args:
backbone: PyTorch model that outputs embeddings (e.g., resnet18 without fc layer)
pnn_head: Initialized PNN instance (Classic or Prototype)
device: 'cpu' or 'cuda'
"""
self.backbone = backbone
self.pnn_head = pnn_head
self.device = device
self.batch_size = batch_size
self.backbone.to(self.device)
self.backbone.eval() # 默认作为特征提取器,处于 eval 模式
def _extract_features(self, X):
"""
Helper to run data through backbone in batches.
X: numpy array (N, C, H, W) or (N, D)
"""
# 转换为 Tensor
if isinstance(X, np.ndarray):
X_tensor = torch.from_numpy(X).float()
else:
X_tensor = X.float()
embeddings = []
n_samples = len(X_tensor)
with torch.no_grad():
for i in range(0, n_samples, self.batch_size):
batch = X_tensor[i : i+self.batch_size].to(self.device)
# Forward pass
emb = self.backbone(batch)
# 如果输出是 (N, C, 1, 1) 这种图像特征,展平它
if len(emb.shape) > 2:
emb = emb.view(emb.size(0), -1)
embeddings.append(emb.cpu().numpy())
return np.vstack(embeddings)
def fit(self, X, y):
"""
1. Extract embeddings using Backbone.
2. Fit PNN head on embeddings.
"""
print("Extracting features for training...")
embeddings = self._extract_features(X)
print(f"Fitting PNN head on shape {embeddings.shape}...")
self.pnn_head.fit(embeddings, y)
return self
def predict(self, X):
embeddings = self._extract_features(X)
return self.pnn_head.predict(embeddings)
def predict_proba(self, X):
embeddings = self._extract_features(X)
return self.pnn_head.predict_proba(embeddings)
11. Phase 3 验证:Deep PNN Demo
我们将模拟一个简单的 Deep PNN 流程:使用一个随机初始化的 MLP 作为 backbone,连接一个 Prototype PNN。
notebooks/demo_deep_pnn.ipynb (逻辑代码):
Python
import torch
import torch.nn as nn
from sklearn.datasets import load_digits
from sklearn.model_selection import train_test_split
from src.pnn.prototype_pnn import PrototypePNN
from src.deep.deep_pnn import DeepPNN
# 1. 准备数据 (MNIST digits: 8x8 images)
digits = load_digits()
X = digits.images # (1797, 8, 8)
y = digits.target
# 简单预处理:Flatten + Normalize
X = X.reshape(len(X), -1) / 16.0 # (1797, 64)
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
# 2. 定义 Backbone (简单的 MLP 降维)
# 将 64 维压缩到 16 维 Embedding
backbone = nn.Sequential(
nn.Linear(64, 32),
nn.ReLU(),
nn.Linear(32, 16)
# 注意:通常这里会加一个 L2 Normalize Layer,让 Embedding 处于超球面上
# 这样欧氏距离等价于余弦相似度,对 PNN 效果更好
)
# 3. 定义 Deep PNN
# 使用 Prototype PNN 作为头,每类只保留 5 个原型
pnn_head = PrototypePNN(n_prototypes=5, sigma=0.5)
deep_model = DeepPNN(backbone=backbone, pnn_head=pnn_head, device='cpu')
# 4. 训练与评估
# 注意:这里 Backbone 是随机初始化的,没有经过 Fine-tuning。
# 在实际项目中,Backbone 通常是预训练好的 (ImageNet) 或通过 Triplet Loss 训练过的。
deep_model.fit(X_train, y_train)
acc = deep_model.score(X_test, y_test)
print(f"Deep PNN Accuracy (Random Backbone): {acc:.4f}")
# 检查 Embedding 维度
sample_emb = deep_model._extract_features(X_test[:1])
print(f"Embedding shape: {sample_emb.shape}")
12. 超参数调优框架:src/training/hyperopt.py

我们将使用 Optuna 框架,通过贝叶斯优化(TPE 算法)自动搜索最优参数。
Python
import optuna
import numpy as np
from sklearn.model_selection import cross_val_score
from src.pnn.classic_pnn import ClassicPNN
from src.pnn.prototype_pnn import PrototypePNN
from functools import partial
class PNNTuner:
"""
基于 Optuna 的 PNN 超参数自动调优器。
"""
def __init__(self, X, y, model_type='classic', n_trials=50):
self.X = X
self.y = y
self.model_type = model_type
self.n_trials = n_trials
def objective(self, trial):
"""
Optuna 的目标函数:返回需要在验证集上最大化的指标 (如 Accuracy)
"""
# 1. 定义搜索空间
sigma = trial.suggest_float("sigma", 0.01, 10.0, log=True)
if self.model_type == 'classic':
model = ClassicPNN(sigma=sigma)
elif self.model_type == 'prototype':
# 搜索原型数量 (例如 5 到 100)
n_prototypes = trial.suggest_int("n_prototypes", 5, 100)
model = PrototypePNN(sigma=sigma, n_prototypes=n_prototypes)
else:
raise ValueError("Unknown model type")
# 2. 交叉验证评估 (3-Fold CV)
# 使用 accuracy 作为优化目标
scores = cross_val_score(model, self.X, self.y, cv=3, scoring='accuracy', n_jobs=-1)
# 返回平均分
return scores.mean()
def run(self):
print(f"Starting optimization for {self.model_type} PNN...")
study = optuna.create_study(direction="maximize")
study.optimize(self.objective, n_trials=self.n_trials)
print("\nBest trial:")
print(f" Value: {study.best_value:.4f}")
print(f" Params: {study.best_params}")
return study.best_params
# 使用示例 (伪代码)
# tuner = PNNTuner(X_train, y_train, model_type='prototype')
# best_params = tuner.run()
# final_model = PrototypePNN(**best_params).fit(X_train, y_train)
13. 模型序列化与导出:src/serve/model_export.py
PNN 的“模型”本质上是数据(原型向量 + 权重)。
-
Classic/Prototype PNN: 使用
pickle或joblib存储。 -
Deep PNN: 稍微复杂,包含 PyTorch
state_dict(Backbone) + Pickle (PNN Head)。
Python
import joblib
import torch
import os
import pickle
from src.deep.deep_pnn import DeepPNN
def save_pnn_model(model, path: str):
"""
保存模型到指定路径。
如果是 DeepPNN,会保存为两个文件:.pt (backbone) 和 .pkl (head)。
"""
os.makedirs(os.path.dirname(path), exist_ok=True)
if isinstance(model, DeepPNN):
# 1. 保存 PyTorch Backbone
backbone_path = path + ".backbone.pt"
torch.save(model.backbone.state_dict(), backbone_path)
# 2. 保存 PNN Head (只存数据,不存 PyTorch 对象)
head_path = path + ".head.pkl"
with open(head_path, 'wb') as f:
pickle.dump(model.pnn_head, f)
print(f"DeepPNN saved to {backbone_path} and {head_path}")
else:
# 普通 PNN 直接 Pickle
joblib.dump(model, path)
print(f"PNN saved to {path}")
def load_pnn_model(path: str, backbone_class=None):
"""
加载模型。如果是 DeepPNN,需要传入 backbone 的类定义来重建结构。
"""
# 检查是否是 DeepPNN (看有没有对应的 .backbone.pt 文件)
backbone_path = path + ".backbone.pt"
head_path = path + ".head.pkl"
if os.path.exists(backbone_path) and os.path.exists(head_path):
if backbone_class is None:
raise ValueError("Loading DeepPNN requires 'backbone_class' argument.")
# 1. 重建 Backbone
backbone = backbone_class()
backbone.load_state_dict(torch.load(backbone_path, map_location='cpu'))
# 2. 加载 Head
with open(head_path, 'rb') as f:
pnn_head = pickle.load(f)
return DeepPNN(backbone=backbone, pnn_head=pnn_head)
else:
# 普通加载
return joblib.load(path)
14. 部署接口 API:src/serve/api.py
我们使用 FastAPI 构建高性能预测服务。 接口设计需要包含:
-
Prediction: 返回类别。
-
Probability: 返回置信度。
-
Explainability (Bonus): 返回最近的原型(Prototype),解释“为什么判为这一类”。
Python
from fastapi import FastAPI, HTTPException
from pydantic import BaseModel
from typing import List
import numpy as np
import uvicorn
from src.serve.model_export import load_pnn_model
# 初始化 App
app = FastAPI(title="PNN Inference Service", version="1.0")
# 全局模型容器
model_wrapper = {}
class PredictRequest(BaseModel):
features: List[List[float]] # 支持 Batch 预测
class PredictResponse(BaseModel):
predictions: List[int]
probabilities: List[List[float]]
class ExplainResponse(BaseModel):
nearest_prototype_indices: List[List[int]] # 返回最近的原型索引
@app.on_event("startup")
def load_model():
# 实际部署时,路径通常通过环境变量读取
# MODEL_PATH = os.getenv("MODEL_PATH", "experiments/results/best_model.pkl")
# model_wrapper['model'] = load_pnn_model(MODEL_PATH)
print("Loading model... (Mocking for demo)")
# 这里为了演示,假设模型已加载
pass
@app.post("/predict", response_model=PredictResponse)
def predict(request: PredictRequest):
model = model_wrapper.get('model')
if not model:
# Mock logic if model not loaded
return {"predictions": [0], "probabilities": [[0.9, 0.1]]}
X = np.array(request.features)
try:
preds = model.predict(X).tolist()
probs = model.predict_proba(X).tolist()
return {"predictions": preds, "probabilities": probs}
except Exception as e:
raise HTTPException(status_code=500, detail=str(e))
@app.get("/health")
def health_check():
return {"status": "ok", "model_loaded": 'model' in model_wrapper}
if __name__ == "__main__":
uvicorn.run(app, host="0.0.0.0", port=8000)
15. 容器化:Dockerfile
为了让这一套系统在任何服务器(AWS, GCP, 本地)都能运行,我们需要 Docker。
Dockerfile
# 使用轻量级 Python 基础镜像
FROM python:3.9-slim
# 设置工作目录
WORKDIR /app
# 1. 安装系统依赖 (如果需要编译 numpy/scipy 加速库)
# RUN apt-get update && apt-get install -y build-essential
# 2. 复制依赖文件并安装
COPY requirements.txt .
RUN pip install --no-cache-dir -r requirements.txt
# 3. 复制源代码
COPY src/ src/
COPY experiments/results/ experiments/results/
# 注意:实际生产中,模型文件通常挂载 Volume 或从 S3 拉取,不打包在镜像里
# 4. 设置环境变量
ENV PYTHONPATH=/app
# 5. 暴露端口
EXPOSE 8000
# 6. 启动命令
CMD ["uvicorn", "src.serve.api:app", "--host", "0.0.0.0", "--port", "8000"]
requirements.txt 内容参考:
Plaintext
numpy>=1.21.0
scipy>=1.7.0
scikit-learn>=1.0
torch>=1.10.0
optuna>=3.0.0
fastapi>=0.95.0
uvicorn>=0.22.0
joblib>=1.1.0

















 15
15

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









