 使用TSMaster构建车辆控制器HIL实时仿真
使用TSMaster构建车辆控制器HIL实时仿真





今天我们继续分享使用TSMaster从零打造车辆控制器HIL实时仿真系列第二章节。接下来我们亲手设计实时仿真也就是HIL的环节,为了让示例通俗易懂,我们选取了CARSIM自带的ABS控制器作为仿真的对象。
一、Simulink模型
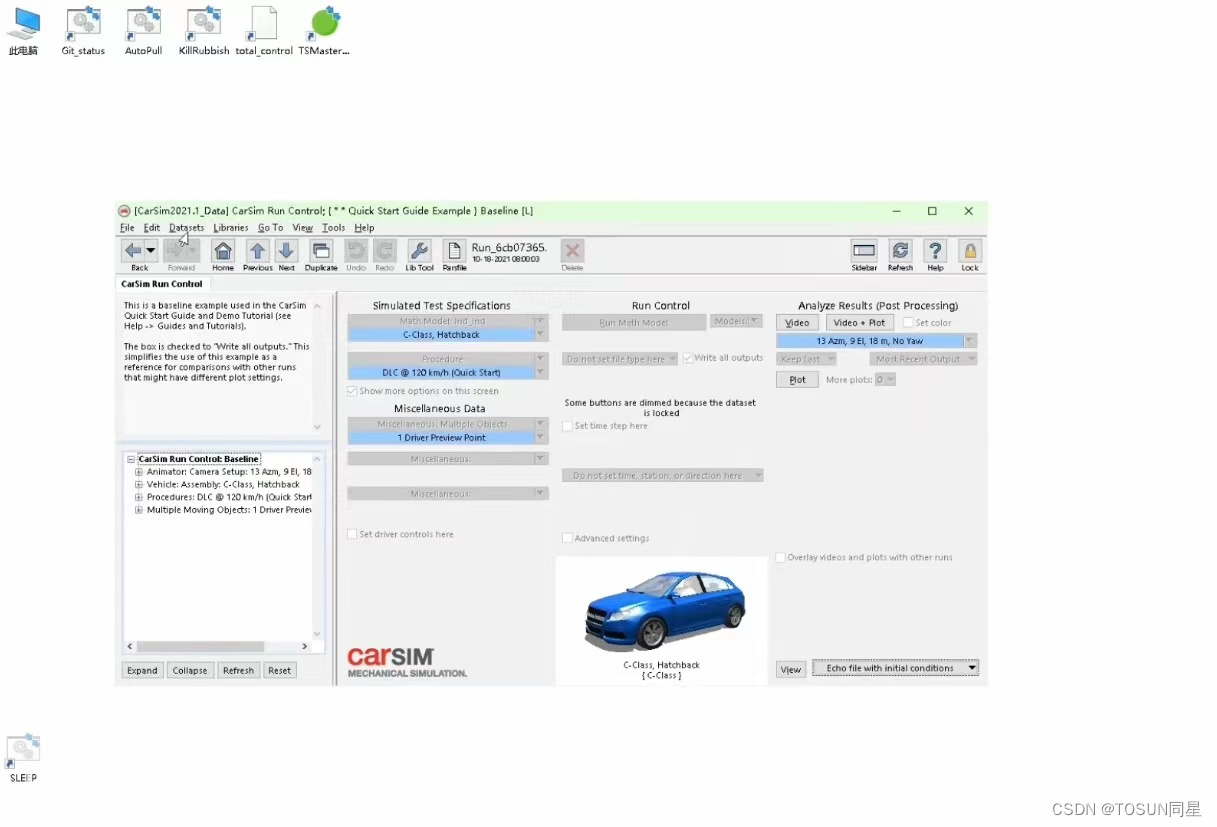
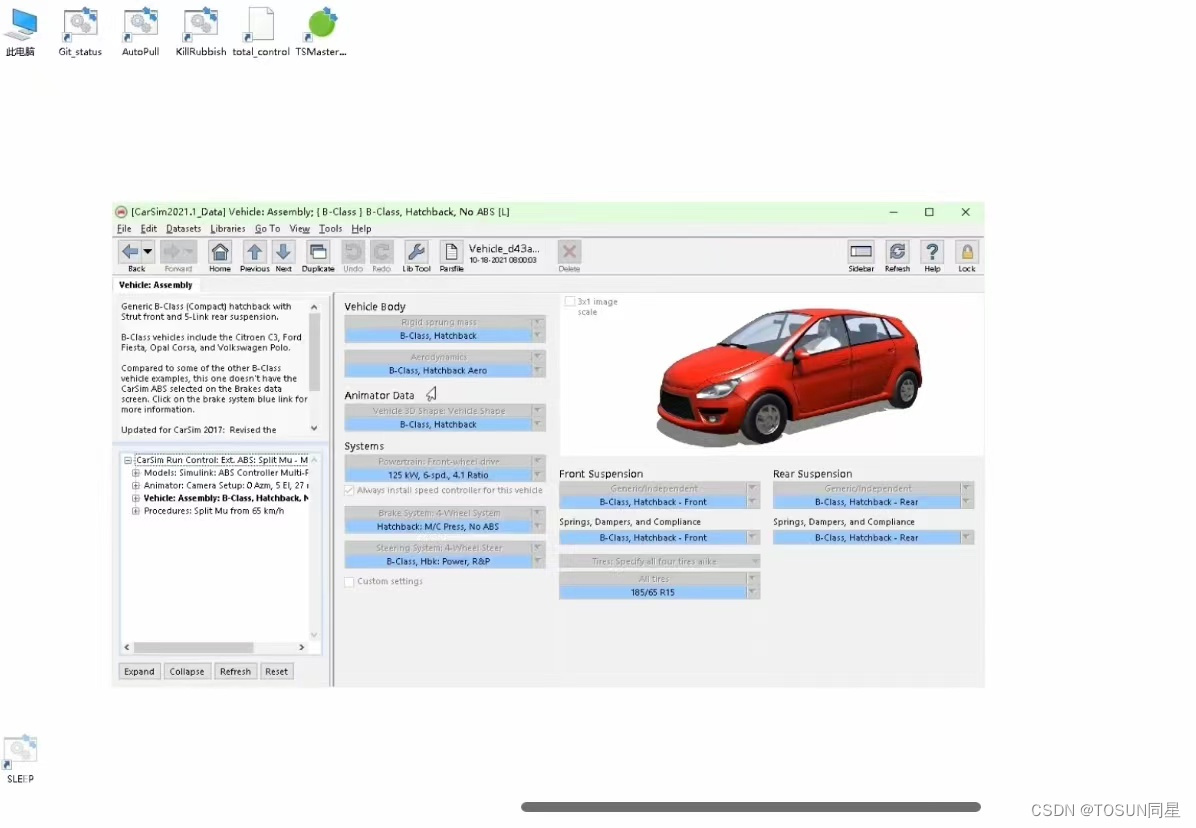
我们打开CARSIM,然后选择Simulink模型,对开路面Multi-port SLX,这个示例使用的是一辆不带ABS系统的小轿车,它是前驱的配置。
我们来看procedure,也就是驾驶员控制的部分,初始的速度是65公里每小时,自动压力是15兆帕,在0.3秒内完成也就是我们常说的150bar,档位控制是在合理的范围内自动切换,而转向部分则交给驾驶员模型进行闭环控制。
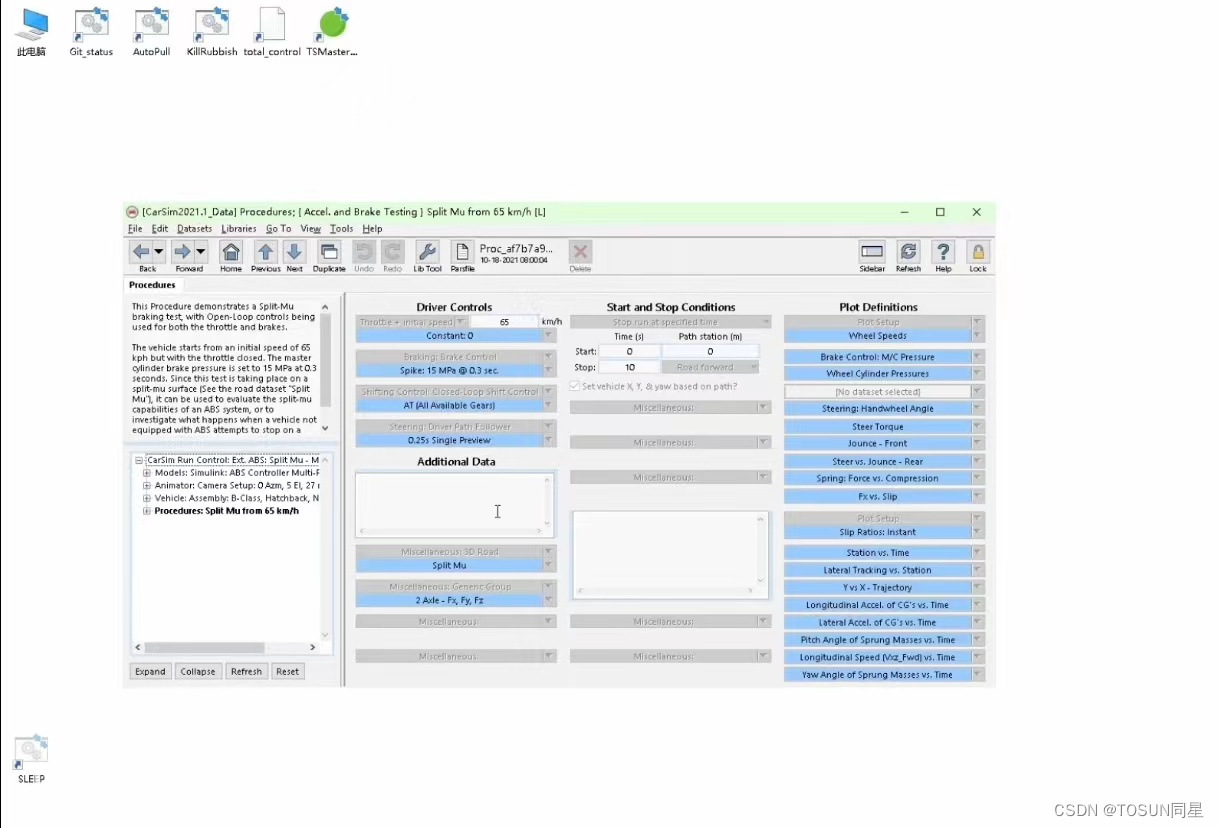
路面部分为对开路面,从3米开始,一侧的系数是0.2,另外一侧是0.5,回到主页,点击Send to Simulink,等待Simulink启动完毕,Simulink模型则是今天的重点。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











