







 本文介绍了基于快速搜索随机树(RRT)算法的3D空间避障路线规划仿真,重点展示了在MATLAB 2022a中的仿真结果。RRT算法是一种递增式构造方法,适用于各种复杂约束的路径规划问题。算法通过随机点采样、节点扩展和碰撞检测来构建搜索树,直至找到目标路径。文中还提供了算法流程图和部分参考文献。
本文介绍了基于快速搜索随机树(RRT)算法的3D空间避障路线规划仿真,重点展示了在MATLAB 2022a中的仿真结果。RRT算法是一种递增式构造方法,适用于各种复杂约束的路径规划问题。算法通过随机点采样、节点扩展和碰撞检测来构建搜索树,直至找到目标路径。文中还提供了算法流程图和部分参考文献。
目录
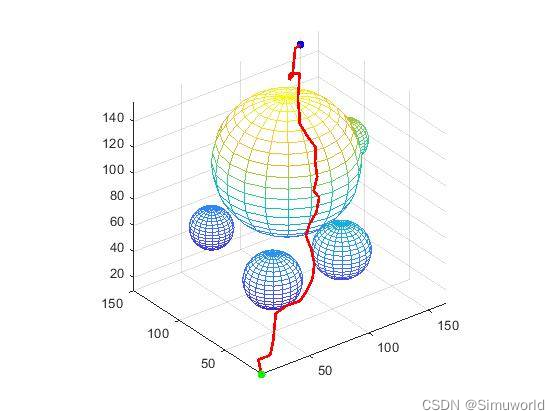
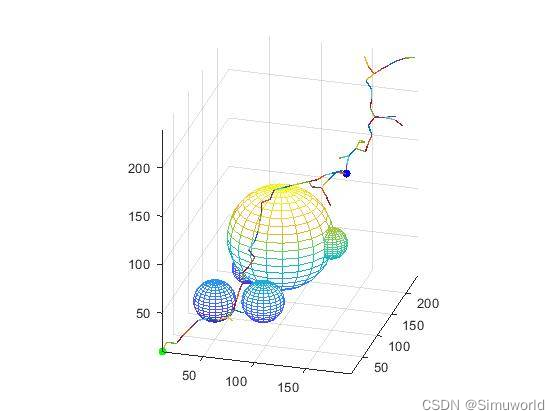
1.算法仿真效果
matlab2022a仿真结果如下:
2.MATLAB源码
%**********************************************************************************
%订阅用户如果对某一个算法感兴趣,可以私信留言文章链接和邮箱,分享任意一份完整代码,
%一般当天晚上或第二天下午4点前会将完整程序发到邮箱中。
%*********************************************************************************
%% 循环
while ~tree1ExpansionFail || ~tree2ExpansionFail
if ~tree1ExpansionFail

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 5275
5275

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











