




4.rosmsg针对消息:
rosmsg list/rosmsg info: 会列出当前 ROS 中的所有 msg
rosmsg packages: 列出包含消息的所有包
rosmsg package: 列出某个包下的所有msg
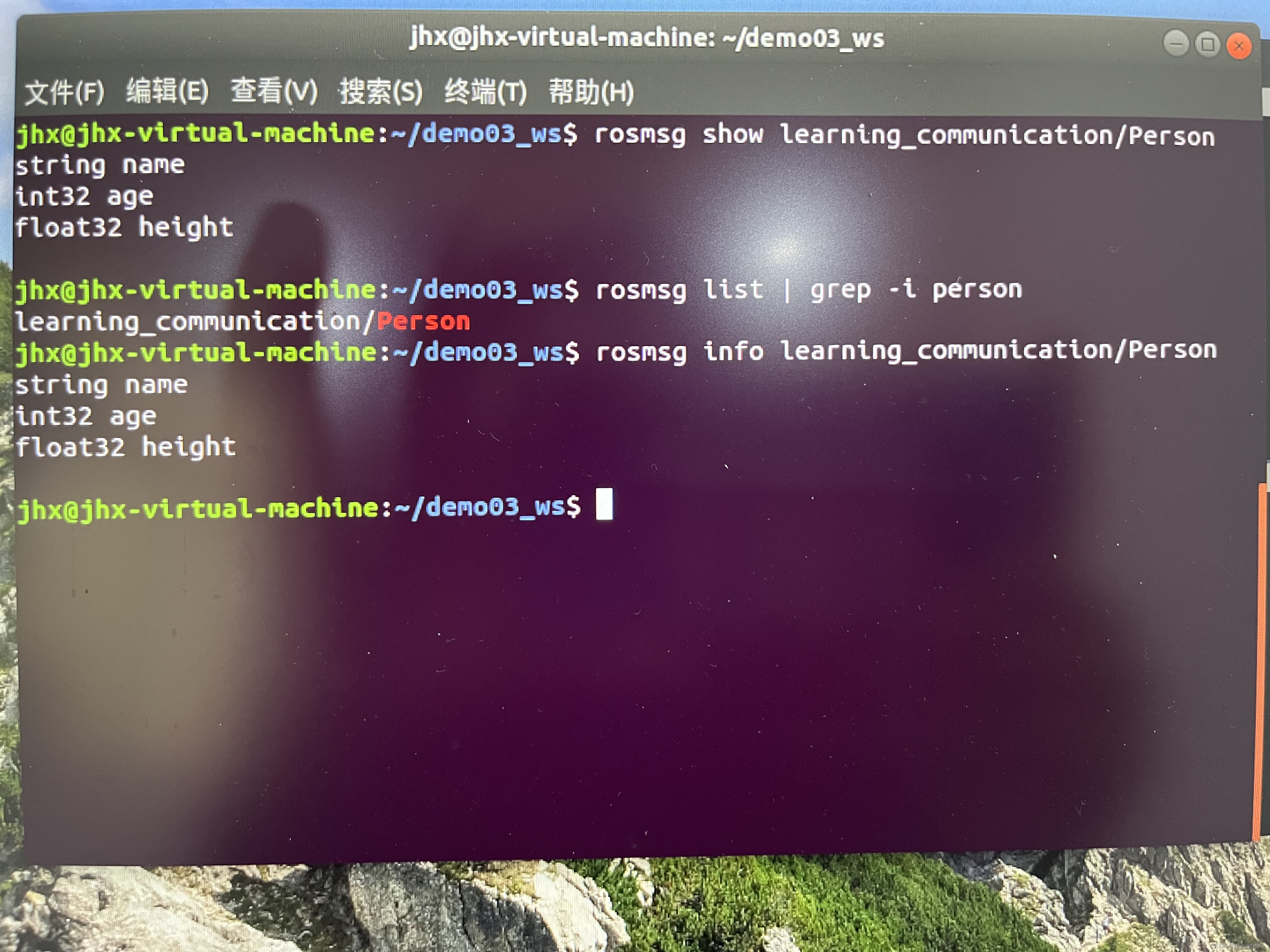
rosmsg show: 显示消息描述
效果如图:
5.rossrv针对服务器:
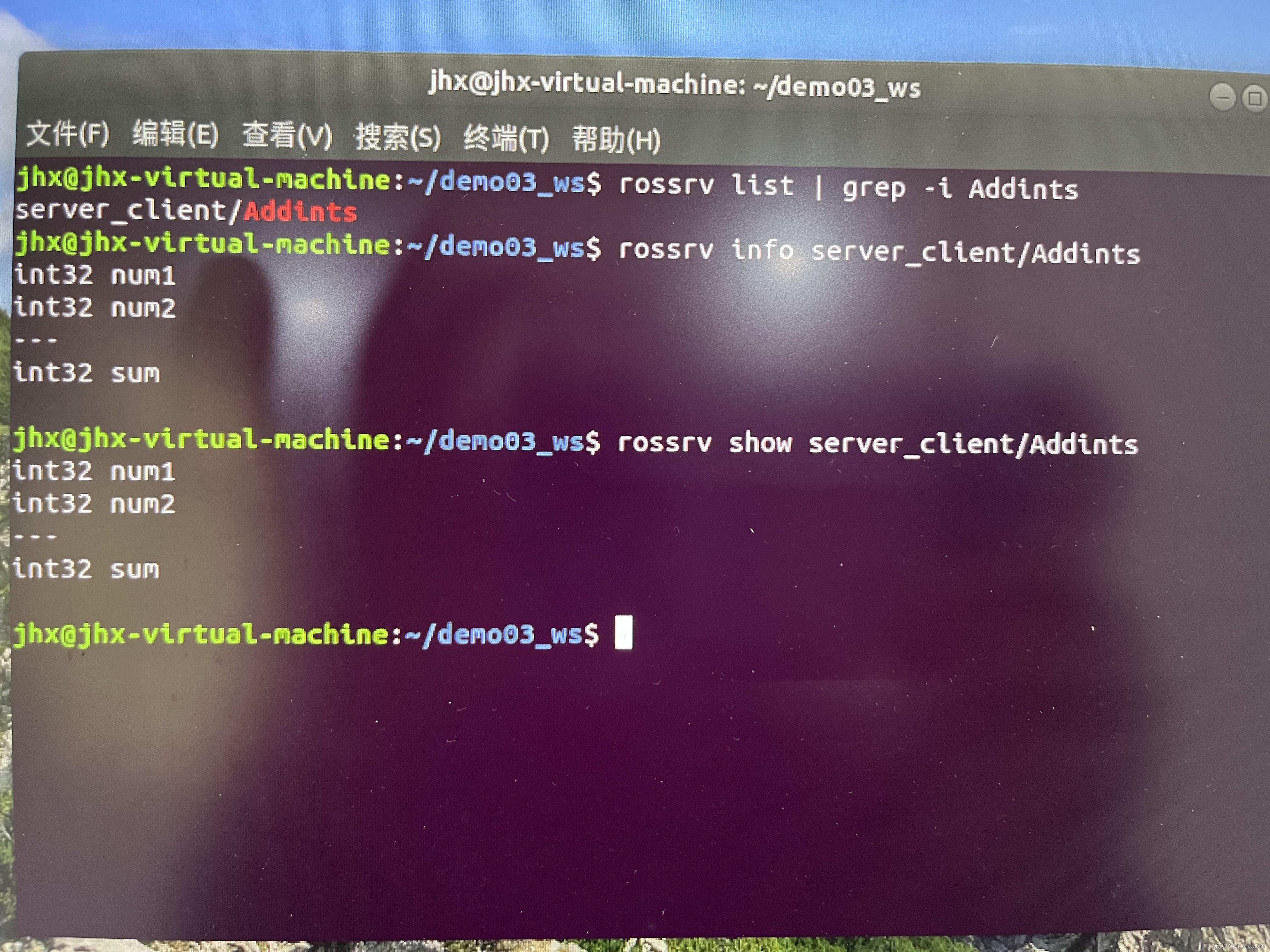
rossrv list (| grep -i topic_name)列出所有的srv消息,加上括号中的内容,可以显示某个包中的消息类型,加上检索名,可以显示包含检索名的相关包
rossrv packages列出包含消息服务所在包
rossrv package 列出指定包下所有msg
rossrv show=rossrv info 显示消息
6.rosparam针对参数:
rosparam list 列出所有参数
rosparam set key_name value设置参数,有的话,进行覆盖,没有的话,进行新建
rosparam get key_name获取键值
rosparam delete key_name删除参数

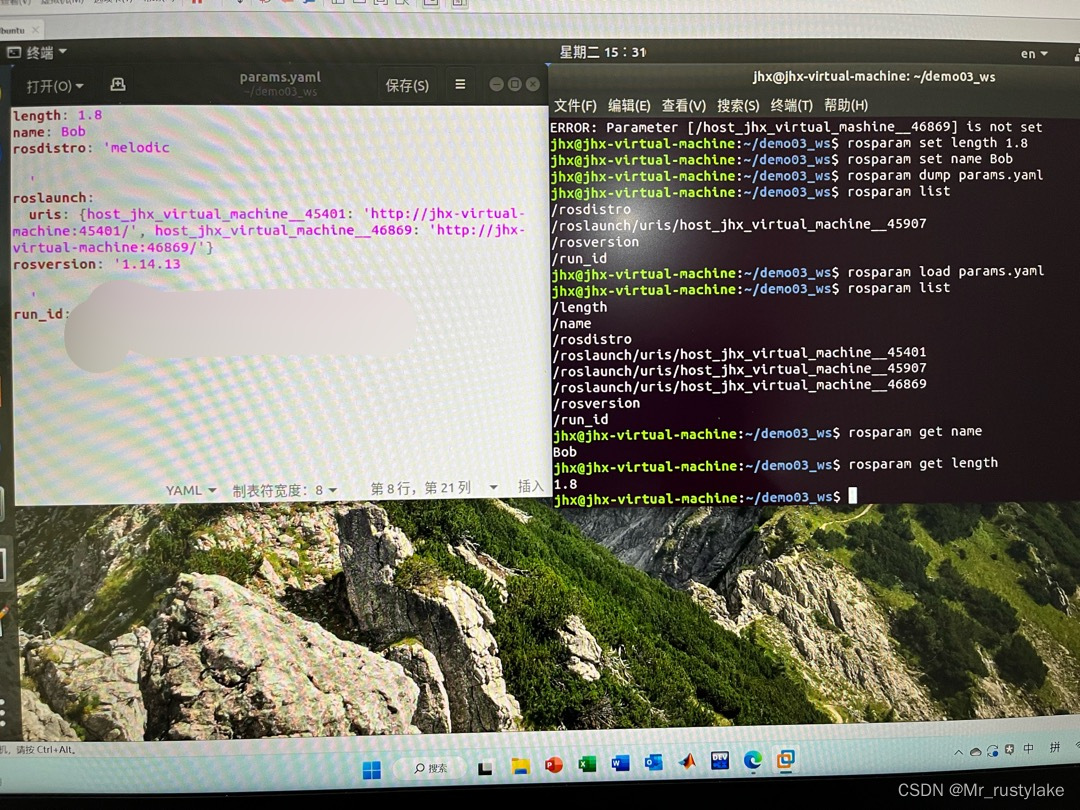
序列与反序列:序列是将数据写入磁盘中形成一个.yaml文件,便于之后的调用输出
先利用rosparam set将键值创建输入,其间可利用rosparam list 查看情况,输入完成后利用rosparam dump yaml_name.yaml在相应文件夹中形成相应的.yaml文件,之后重启roscore再用rosparam list 查看参数时可以发现之前设置的参数已经被重置了,此时调用rosparam load yaml_name.yaml 命令将yaml文件加载入程序中输出

















 99
99

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









