 DOA算法无人机三维路径规划
DOA算法无人机三维路径规划




✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
在科技飞速发展的当下,无人机技术取得了显著的进步,无人机集群协同作业在众多领域展现出了巨大的应用潜力。无论是在军事领域的侦察、打击、电子干扰任务,还是民用领域的物流配送、农业植保、环境监测以及城市规划与建设等工作,无人机集群都发挥着不可或缺的作用。而在无人机集群执行任务的过程中,协同三维路径规划成为了关键技术,其重要性不言而喻。
以军事侦察任务为例,无人机集群需要深入敌方区域获取情报,合理的三维路径规划能够让它们避开敌方的防御设施,如雷达监测区域、防空导弹阵地等,确保任务的顺利执行和自身的安全。在物流配送领域,多架无人机协同运输货物时,精确的路径规划可以提高配送效率,减少飞行时间和能耗,实现快速、高效的货物运输。在复杂的城市环境中进行物流配送,无人机需要避开高楼大厦、通信基站等障碍物,同时还要考虑不同无人机之间的飞行顺序和间隔,避免发生碰撞。
传统的路径规划算法,如 A * 算法、Dijkstra 算法等,在处理小规模、简单场景下的路径规划问题时,能够取得较好的效果。但当面对三维空间中复杂的环境,如存在大量障碍物、禁飞区,以及多无人机协同作业时的复杂约束条件,如避免碰撞、保持编队、满足任务时序要求等,这些传统算法的计算复杂度会急剧增加,并且容易陷入局部最优解,无法满足实际应用的需求 。
为了解决这些问题,智能优化算法应运而生。近年来,智能优化算法因其强大的全局搜索能力,在路径规划领域受到了广泛关注。而梦境优化算法(Dream Optimization Algorithm,DOA)作为一种新颖的元启发式算法,其设计灵感源自人类梦境机制。在人类的梦境中,大脑会对记忆进行筛选、保留、遗忘以及逻辑自组织,从而产生各种奇特的梦境。DOA 算法巧妙地模仿了这些特性,通过独特的记忆策略保持并更新优秀的解决方案,利用遗忘机制去除低效或冗余的数据点,依据补充规则引入新元素以增强多样性 ,在处理高维复杂空间内的全局最优搜索方面表现出色。
将 DOA 算法应用于无人机集群协同三维路径规划,为该领域带来了新的研究方向和解决方案。通过模拟大脑在梦境中的信息处理过程,DOA 算法有望在复杂的约束条件下,为无人机集群规划出更加高效、安全、协同的三维路径,提升无人机集群在实际应用中的性能和效果。这一创新性的研究不仅具有重要的理论意义,也为无人机集群在各个领域的广泛应用提供了有力的技术支持 。
二、无人机集群协同三维路径规划挑战剖析
在无人机集群协同执行任务的过程中,三维路径规划面临着诸多复杂且极具挑战性的难题,这些难题严重制约着无人机集群的应用效能与发展前景。
高维复杂性
无人机集群协同三维路径规划涉及多个无人机在三维空间中的运动规划,这使得解空间维度随无人机数量呈指数级增长 。每架无人机都需要考虑自身的位置、速度、姿态等状态信息,同时还要兼顾其他无人机的状态以及环境信息。以一个包含 n 架无人机的集群为例,若每架无人机的路径由 m 个节点表示,那么解空间的规模将达到
mn
级别,如此庞大的搜索空间使得传统的路径规划算法在计算上变得极为困难,极易陷入局部最优解,难以找到全局最优路径。
动态环境适应性
真实环境中的障碍物和威胁往往是动态变化的 ,这对无人机集群的路径规划提出了极高的要求。例如,在城市环境中执行物流配送任务时,可能会突然出现临时交通管制区域、大型活动现场等临时障碍物;在军事应用场景下,敌方的防空火力部署、移动雷达等动态威胁随时可能对无人机集群构成威胁。面对这些动态变化,路径规划算法需要具备快速适应和重规划的能力,能够实时感知环境变化并及时调整路径,以确保无人机集群的安全和任务的顺利执行。然而,现有的许多算法在处理动态环境时,由于计算量过大或反应速度过慢,难以满足实际应用的需求。
协同约束
多无人机之间需要保持特定的队形、避免碰撞,并协调完成任务,这一系列协同约束条件进一步增加了路径规划的复杂性 。在执行编队飞行任务时,无人机之间需要保持精确的相对位置和距离,以维持整齐的编队形状,这就要求每架无人机的路径规划必须相互协调,考虑到编队的整体需求。同时,为了避免无人机之间发生碰撞,需要建立有效的避碰机制,确保无人机在飞行过程中始终保持安全距离。此外,在一些任务中,还可能存在任务时序要求,例如多架无人机需要按照特定的顺序到达不同的目标点,这也对路径规划提出了额外的约束。
解决这些挑战对于无人机在各个领域的广泛应用具有至关重要的意义 。高效的路径规划可以显著提高任务效率,通过优化路径,无人机能够更快地到达目标地点,减少飞行时间和能耗,从而提高任务完成的效率。在物流配送中,合理的路径规划可以使无人机更快地将货物送达目的地,提高配送效率,降低物流成本。增强安全性,规避障碍物和威胁能够有效降低无人机的损毁风险,保障飞行安全。在军事侦察任务中,避开敌方的防御设施和威胁区域,能够确保无人机安全执行任务,获取关键情报。拓展应用领域,优化的协同控制可以使无人机集群更适应复杂的应用场景,拓展其应用领域。在复杂的城市环境或自然灾害现场,无人机集群能够通过协同路径规划,更好地完成救援、监测等任务。因此,攻克无人机集群协同三维路径规划的挑战,是推动无人机技术发展和广泛应用的关键所在 。
三、梦境优化算法(DOA)深度揭秘
(一)DOA 核心原理
梦境优化算法(DOA)是一种受人类梦境启发的元启发式优化算法,其核心在于模仿大脑在梦境中对记忆的处理机制,以此来平衡全局搜索与局部开发能力 。
二)在路径规划中的独特优势
在无人机集群协同三维路径规划中,梦境优化算法(DOA)展现出多方面的独特优势 。
在平衡全局搜索与局部开发方面,DOA 的记忆策略使得算法能够保留并参考优秀的路径解决方案,为后续搜索提供引导,避免盲目探索 。遗忘机制去除那些低效或冗余的路径数据点,使得算法能够聚焦于更有潜力的区域。补充规则引入新的路径元素,增加了搜索的多样性,防止算法过早收敛于局部最优解 。在一个复杂的城市环境三维路径规划场景中,存在众多高楼大厦等障碍物,DOA 算法通过记忆策略记住那些成功避开障碍物且路径较短的关键节点信息,在后续搜索中以此为基础进行局部开发;同时,利用遗忘机制去除那些明显不合理的路径,如穿越建筑物的路径;补充规则则会在一些未充分探索的区域引入新的路径尝试,从而在全局范围内不断寻找更优路径,有效平衡了全局搜索与局部开发 。
面对复杂的约束条件,DOA 也表现出色 。在多无人机协同路径规划中,需要考虑避免碰撞、保持编队、满足任务时序要求等复杂约束。DOA 在搜索过程中,通过对路径的不断优化和调整,能够有效满足这些约束条件 。在保持编队飞行的任务中,DOA 可以根据每架无人机的位置和速度信息,结合编队要求,不断调整路径,确保无人机之间保持合适的相对位置和距离 。
避免陷入局部最优解是许多路径规划算法面临的难题,而 DOA 的梦境共享策略和动态更新机制使其在这方面具有显著优势 。梦境共享策略允许个体在遗忘维度上随机获取其他个体的位置信息,促进了不同路径信息的交流和融合,有助于算法跳出局部最优 。在一个存在多个局部最优解的复杂山地环境路径规划中,某条路径在局部区域内看似最优,但通过梦境共享策略,不同个体之间交换路径信息,可能会发现一条绕过山脉、距离更短且更安全的全局最优路径 。同时,DOA 的动态更新机制,通过遗忘和补充策略,不断引入新的路径尝试,使得算法在搜索过程中始终保持对解空间的全面探索,降低了陷入局部最优的风险 。
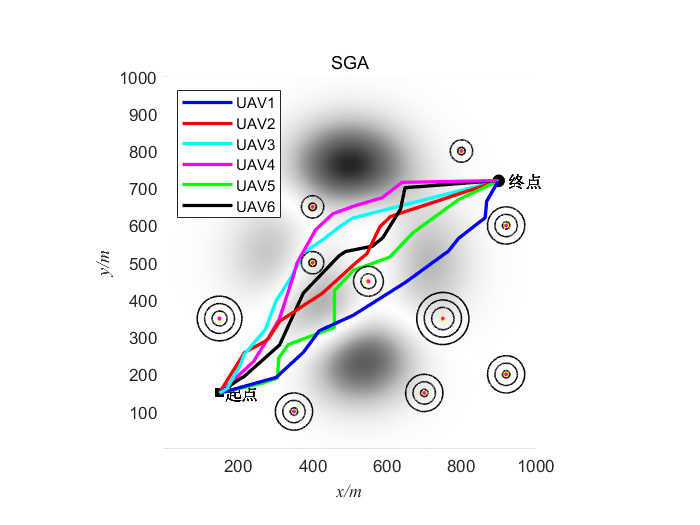
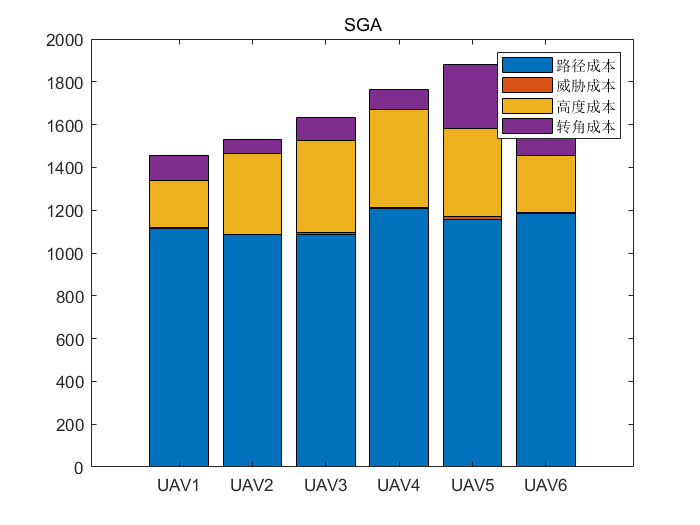
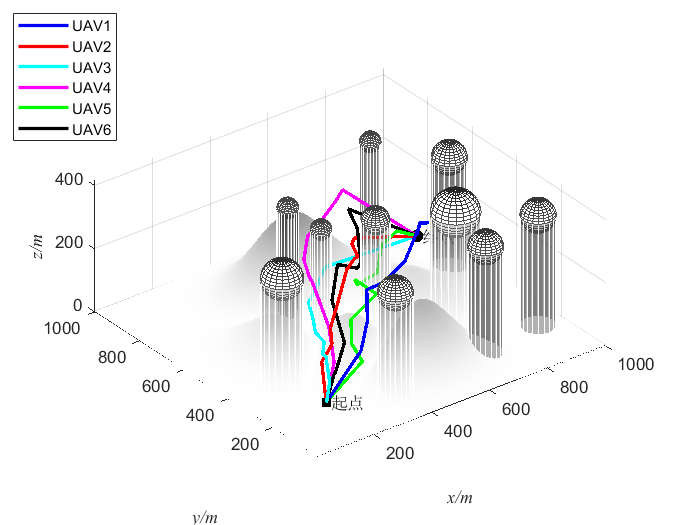
⛳️ 运行结果
📣 部分代码
function c = othercolor(n,m)
% OTHERCOLOR alternative colormaps from various sources
%
% OTHERCOLOR(N,M) returns a M-by-3 matrix contaning a colormap given by
% the name N. OTHERCOLOR, by itself, is the same length as the current
% figure's colormap. If no figure exists, MATLAB creates one.
%
% Supported colormaps are stored in a colorData.mat. And you can easily
% add your own: they are just standard MATLAB RGB colormap matrices.
%
% From: http://geography.uoregon.edu/datagraphics/color_scales.htm
% BrBu_10 BuDOr_18 BuGr_14 BuOr_10 Bu_10 GrMg_16
% BrBu_12 BuDRd_12 BuGy_8 BuOr_12 Bu_7 RdYlBu_11b
% BuDOr_12 BuDRd_18 BuOrR_14 BuOr_8 Cat_12 StepSeq_25
%
% From: http://www.colorbrewer2.org
% Accent3 GnBu6 Paired4 PuOr4 RdYlBu10 Set37
% Accent4 GnBu7 Paired5 PuOr5 RdYlBu11 Set38
% Accent5 GnBu8 Paired6 PuOr6 RdYlBu3 Set39
% Accent6 GnBu9 Paired7 PuOr7 RdYlBu4 Spectral10
% Accent7 Greens3 Paired8 PuOr8 RdYlBu5 Spectral11
% Accent8 Greens4 Paired9 PuOr9 RdYlBu6 Spectral3
% Blues3 Greens5 Pastel13 PuRd3 RdYlBu7 Spectral4
% Blues4 Greens6 Pastel14 PuRd4 RdYlBu8 Spectral5
% Blues5 Greens7 Pastel15 PuRd5 RdYlBu9 Spectral6
% Blues6 Greens8 Pastel16 PuRd6 RdYlGn10 Spectral7
% Blues7 Greens9 Pastel17 PuRd7 RdYlGn11 Spectral8
% Blues8 Greys3 Pastel18 PuRd8 RdYlGn3 Spectral9
% Blues9 Greys4 Pastel19 PuRd9 RdYlGn4 YlGn3
% BrBG10 Greys5 Pastel23 Purples3 RdYlGn5 YlGn4
% BrBG11 Greys6 Pastel24 Purples4 RdYlGn6 YlGn5
% BrBG3 Greys7 Pastel25 Purples5 RdYlGn7 YlGn6
% BrBG4 Greys8 Pastel26 Purples6 RdYlGn8 YlGn7
% BrBG5 Greys9 Pastel27 Purples7 RdYlGn9 YlGn8
% BrBG6 OrRd3 Pastel28 Purples8 Reds3 YlGn9
% BrBG7 OrRd4 PiYG10 Purples9 Reds4 YlGnBu3
% BrBG8 OrRd5 PiYG11 RdBu10 Reds5 YlGnBu4
% BrBG9 OrRd6 PiYG3 RdBu11 Reds6 YlGnBu5
% BuGn3 OrRd7 PiYG4 RdBu3 Reds7 YlGnBu6
% BuGn4 OrRd8 PiYG5 RdBu4 Reds8 YlGnBu7
% BuGn5 OrRd9 PiYG6 RdBu5 Reds9 YlGnBu8
% BuGn6 Oranges3 PiYG7 RdBu6 Set13 YlGnBu9
% BuGn7 Oranges4 PiYG8 RdBu7 Set14 YlOrBr3
% BuGn8 Oranges5 PiYG9 RdBu8 Set15 YlOrBr4
% BuGn9 Oranges6 PuBu3 RdBu9 Set16 YlOrBr5
% BuPu3 Oranges7 PuBu4 RdGy10 Set17 YlOrBr6
% BuPu4 Oranges8 PuBu5 RdGy11 Set18 YlOrBr7
% BuPu5 Oranges9 PuBu6 RdGy3 Set19 YlOrBr8
% BuPu6 PRGn10 PuBu7 RdGy4 Set23 YlOrBr9
% BuPu7 PRGn11 PuBu8 RdGy5 Set24 YlOrRd3
% BuPu8 PRGn3 PuBu9 RdGy6 Set25 YlOrRd4
% BuPu9 PRGn4 PuBuGn3 RdGy7 Set26 YlOrRd5
% Dark23 PRGn5 PuBuGn4 RdGy8 Set27 YlOrRd6
% Dark24 PRGn6 PuBuGn5 RdGy9 Set28 YlOrRd7
% Dark25 PRGn7 PuBuGn6 RdPu3 Set310 YlOrRd8
% Dark26 PRGn8 PuBuGn7 RdPu4 Set311 YlOrRd9
% Dark27 PRGn9 PuBuGn8 RdPu5 Set312
% Dark28 Paired10 PuBuGn9 RdPu6 Set33
% GnBu3 Paired11 PuOr10 RdPu7 Set34
% GnBu4 Paired12 PuOr11 RdPu8 Set35
% GnBu5 Paired3 PuOr3 RdPu9 Set36
%
% From Mathematica:
% MCMYKcolors MIndexed45 Mdarkterrain
% MHTML MIndexed46 Mdeepseacolors
% MIndexed1 MIndexed47 Mfallcolors
% MIndexed10 MIndexed48 Mfruitpunchcolors
% MIndexed11 MIndexed49 Mfuchsiatones
% MIndexed12 MIndexed5 Mgeologicages
% MIndexed13 MIndexed50 Mgraytones
% MIndexed14 MIndexed51 Mgrayyellowtones
% MIndexed15 MIndexed52 Mgreenbrownterrain
% MIndexed16 MIndexed53 Mgreenpinktones
% MIndexed17 MIndexed54 Mhypsometrictints
% MIndexed18 MIndexed55 Mislandcolors
% MIndexed19 MIndexed56 Mlakecolors
% MIndexed2 MIndexed57 Mlegacy
% MIndexed20 MIndexed58 Mlighttemperaturemap
% MIndexed21 MIndexed59 Mlightterrain
% MIndexed22 MIndexed6 Mmintcolors
% MIndexed23 MIndexed60 Mneoncolors
% MIndexed24 MIndexed61 Mpastel
% MIndexed25 MIndexed62 Mpearlcolors
% MIndexed26 MIndexed7 Mpigeontones
% MIndexed27 MIndexed8 Mplumcolors
% MIndexed28 MIndexed9 Mrainbow
% MIndexed29 Malpinecolors Mredbluetones
% MIndexed3 Maquamarine Mredgreensplit
% MIndexed30 Marmycolors Mrosecolors
% MIndexed31 Matlanticcolors Mrusttones
% MIndexed32 Matoms Msandyterrain
% MIndexed33 Mauroracolors Msiennatones
% MIndexed34 Mavocadocolors Msolarcolors
% MIndexed35 Mbeachcolors Msouthwestcolors
% MIndexed36 Mblackbodyspectrum Mstarrynightcolors
% MIndexed37 Mbluegreenyellow Msunsetcolors
% MIndexed38 Mbrasstones Mtemperaturemap
% MIndexed39 Mbrightbands Mthermometercolors
% MIndexed4 Mbrowncyantones Mvalentinetones
% MIndexed40 Mcandycolors Mvisiblespectrum
% MIndexed41 Mcherrytones Mwatermeloncolors
% MIndexed42 Mcoffeetones Mwebsafe
% MIndexed43 Mdarkbands
% MIndexed44 Mdarkrainbow
%
% Usage:
% A typical 3D plot:
% >> [X,Y,Z] = peaks(30);
% >> surfc(X,Y,Z)
% >> colormap(othercolor('RdYlBu_11b'))
% >> colorbar
% >> axis([-3 3 -3 3 -10 5])
%
% To get the list of available colormaps in a cellarray:
% >> colormapNames = othercolor();
%
% Iterate through colormaps (enter to move to next, ctrl+c to exit loop)
% >> l = othercolor; for i=1:length(l), colormap(othercolor(i));pause;end
%
% Plot the first 50 colormaps
% >> colors = othercolor();
% >> l = 50;
% >> for i=1:l
% >> subplot(ceil(l/10),10,i);
% >> c = othercolor(i);
% >> imagesc(reshape(c,1,size(c,1),size(c,2)));
% >> title(char(colors(i)),'interpreter','none');
% >> axis off;
% >> end
%
% Author: Joshua Atkins
% Date: March 1, 2011
types = who('-file','colorData.mat');
% if no colormap is choosen then display available colormaps
if nargin < 1,
c = types;
else
% default number of points
if nargin < 2, m = size(get(gcf,'colormap'),1); end
% allows numerical indexing
if isnumeric(n), n = char(types(n)); end
% load color data
data = load('colorData.mat',n);
if isempty(fieldnames(data))
c = [];
else
c = interp1(linspace(0,1,size(data.(n),1)),data.(n),linspace(0,1,m),'cubic');
c(c<0) = 0;
c(c>1) = 1;
end
end
🔗 参考文献
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🏆团队擅长辅导定制多种科研领域MATLAB仿真,助力科研梦:
🌟 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位、冷链、时间窗、多车场等、选址优化、港口岸桥调度优化、交通阻抗、重分配、停机位分配、机场航班调度、通信上传下载分配优化
🌟 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
2.10 DBN深度置信网络时序、回归预测和分类
2.11 FNN模糊神经网络时序、回归预测
2.12 RF随机森林时序、回归预测和分类
2.13 BLS宽度学习时序、回归预测和分类
2.14 PNN脉冲神经网络分类
2.15 模糊小波神经网络预测和分类
2.16 时序、回归预测和分类
2.17 时序、回归预测预测和分类
2.18 XGBOOST集成学习时序、回归预测预测和分类
2.19 Transform各类组合时序、回归预测预测和分类
方向涵盖风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、用电量预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
🌟图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
🌟 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、 充电车辆路径规划(EVRP)、 双层车辆路径规划(2E-VRP)、 油电混合车辆路径规划、 船舶航迹规划、 全路径规划规划、 仓储巡逻、公交车时间调度、水库调度优化、多式联运优化
🌟 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化、车辆协同无人机路径规划、
🌟 通信方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化、水声通信、通信上传下载分配
🌟 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化、心电信号、DOA估计、编码译码、变分模态分解、管道泄漏、滤波器、数字信号处理+传输+分析+去噪、数字信号调制、误码率、信号估计、DTMF、信号检测
🌟电力系统方面
微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电、电/冷/热负荷预测、电力设备故障诊断、电池管理系统(BMS)SOC/SOH估算(粒子滤波/卡尔曼滤波)、 多目标优化在电力系统调度中的应用、光伏MPPT控制算法改进(扰动观察法/电导增量法)、电动汽车充放电优化、微电网日前日内优化、储能优化、家庭用电优化、供应链优化
🌟 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长 金属腐蚀
🌟 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合、SOC估计、阵列优化、NLOS识别
🌟 车间调度
零等待流水车间调度问题NWFSP 、 置换流水车间调度问题PFSP、 混合流水车间调度问题HFSP 、零空闲流水车间调度问题NIFSP、分布式置换流水车间调度问题 DPFSP、阻塞流水车间调度问题BFSP
👇

















 1386
1386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









