



 文章介绍了使用背景差分技术进行运动车辆检测的基本步骤,包括获取背景图像、差分处理、二值化、形态学操作和目标识别。这种方法在静态背景和简单场景下有效,但需结合其他技术提高在复杂环境中的准确性。提供的Matlab代码示例展示了图像处理过程。
文章介绍了使用背景差分技术进行运动车辆检测的基本步骤,包括获取背景图像、差分处理、二值化、形态学操作和目标识别。这种方法在静态背景和简单场景下有效,但需结合其他技术提高在复杂环境中的准确性。提供的Matlab代码示例展示了图像处理过程。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
⛄ 内容介绍
基于背景差分的方法是一种常见的运动目标检测技术,用于检测运动车辆。下面是基于背景差分实现运动车辆检测的基本步骤:
- 获取背景图像:在开始运动目标检测之前,需要获取静态背景图像。这可以通过将相机定在没有运动目标的情况下进行拍摄,并对一系列连续图像进行平均或帧差法得到。
- 提取前景差分图像:将当前帧图像与背景图像进行差分操作,得到前景差分图像。可以使用灰度差分、颜色差分或其他图像差分方法来捕捉运动变化。
- 处理前景差分图像:对前景差分图像进行二值化或阈值处理,将运动目标从背景中分割出来。选择适当的阈值或阈值函数来减少噪声和进行目标提取。
- 目标过滤和识别:对二值化的前景图像进行形态学操作(如开运算、闭运算)来去除噪声和填充目标区域。可以将图像分为连通区域,并根据区域面积、宽高比、紧凑度等特征进行目标过滤和识别。
- 标定目标位置:根据目标在图像中的位置,可以绘制边界示检测到的运动目标的位置和范围。这样可以可视化地展示运动车辆的位置信息。
需要的是,基于背景差分的方法对于静止背景和相对简单的场景效果较好。然而,在复杂的环境中可能会存在背景变化、光照变化等干扰因素,会影响检测结果的准确性。因此,在实际应用中,需要结合其他技术和方法,如运动轨迹跟踪、深度学习目标检测等,来提高运动车辆检测的鲁棒性和准确性。
⛄ 部分代码
clear all;
close all;
a=imread('m1.bmp');
b=imread('m18.bmp');
c=b-a; %两个图片做减法
ex=rgb2gray(c); %将图片转换成灰度图
temp(:,:,1)=bw4;
temp(:,:,2)=bw4;
temp(:,:,3)=bw4;
figure(2)
temp = uint8(temp);
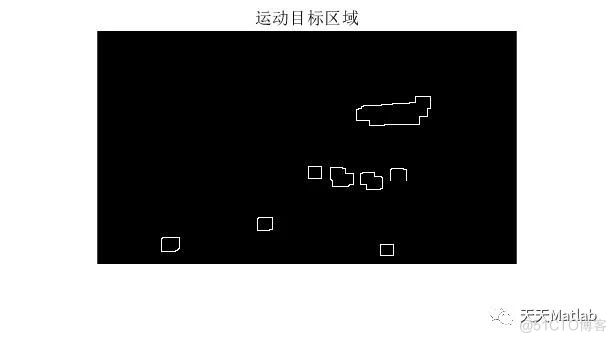
imshow(temp);title('运动目标区域')
figure(4)
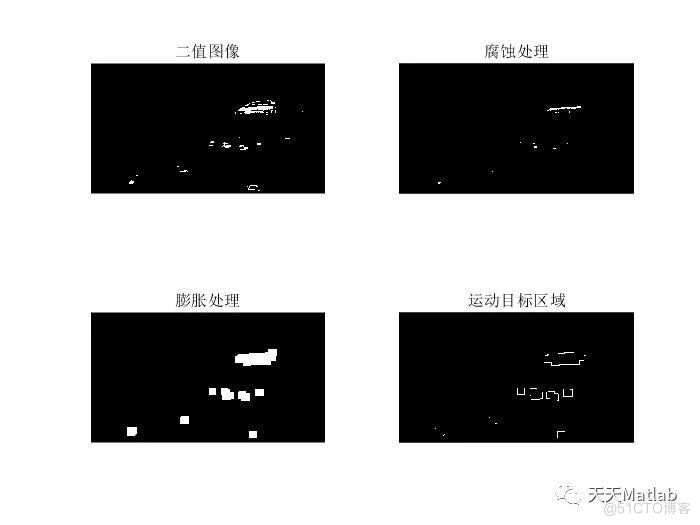
subplot(2,2,1);
imshow(bw1);title('二值图像')
subplot(2,2,2);
imshow(bw2);title('腐蚀处理')
subplot(2,2,3);
imshow(bw3);title('膨胀处理')
subplot(2,2,4);
imshow(temp);title('运动目标区域')
x=imadd(b,temp,'uint8');
figure(3)
imshow(x);title('运动目标检测结果图')
⛄ 运行结果


⛄ 参考文献
[1] 刘自选,王争争,王雅雯,等.基于视频图像处理的车辆检测系统[J].山西电子技术, 2020.
[2] 王水鱼,李艳婷.基于Surendra背景差分和帧间差分的运动目标检测[J].微型机与应用, 2016, 35(17):4.DOI:10.19358/j.issn.1674-7720.2016.17.013.

















 360
360

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









