



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、引言
雷达技术作为现代科技的重要组成部分,广泛应用于军事、气象、航空航天等众多领域。在教育场景中,让学生了解雷达信号的生成、采集和处理过程,不仅有助于他们掌握电子信息、信号处理等专业知识,还能培养其实践能力和创新思维。基于教育的雷达信号相关操作能够让学生直观地理解雷达系统的工作原理,为未来从事相关领域的研究和应用奠定坚实基础。
二、雷达信号生成
信号类型与原理 雷达信号有多种类型,常见的包括脉冲信号、连续波信号等。脉冲信号具有间歇性发射的特点,通过控制脉冲的宽度、重复频率等参数,可以实现对目标的探测和距离测量。连续波信号则是持续发射,常用于速度测量等场景。其原理基于电磁理论,利用发射机将电信号转换为电磁波向空间辐射。
教育实践中的信号生成 在教育环境下,通常借助信号发生器来生成雷达信号。学生可以通过设置信号发生器的参数,如频率、幅度、相位等,来模拟不同类型的雷达信号。这不仅能让他们深入理解信号的基本特性,还能体验到如何根据实际需求设计合适的雷达信号。例如,在学习脉冲雷达时,学生可以调整脉冲宽度和重复频率,观察信号的变化对雷达性能的影响。
三、雷达信号采集
采集设备与原理 雷达信号采集主要依靠接收天线和数据采集卡。接收天线负责将空间中的电磁波转换为电信号,数据采集卡则将模拟电信号转换为数字信号,以便后续处理。其原理是基于电磁感应和模数转换技术,接收天线感应到电磁波产生感应电流,数据采集卡对感应电流进行采样和量化。
教育实践中的信号采集 在教育场景中,学生可以使用实验平台进行信号采集。他们需要正确连接接收天线和数据采集卡,并设置合适的采样频率、采样位数等参数。通过实际操作,学生能够理解信号采集过程中采样定理的重要性,以及如何避免信号失真。例如,当采样频率过低时,会出现频谱混叠现象,学生可以通过实验观察到这一现象,并分析其原因。
四、雷达信号处理
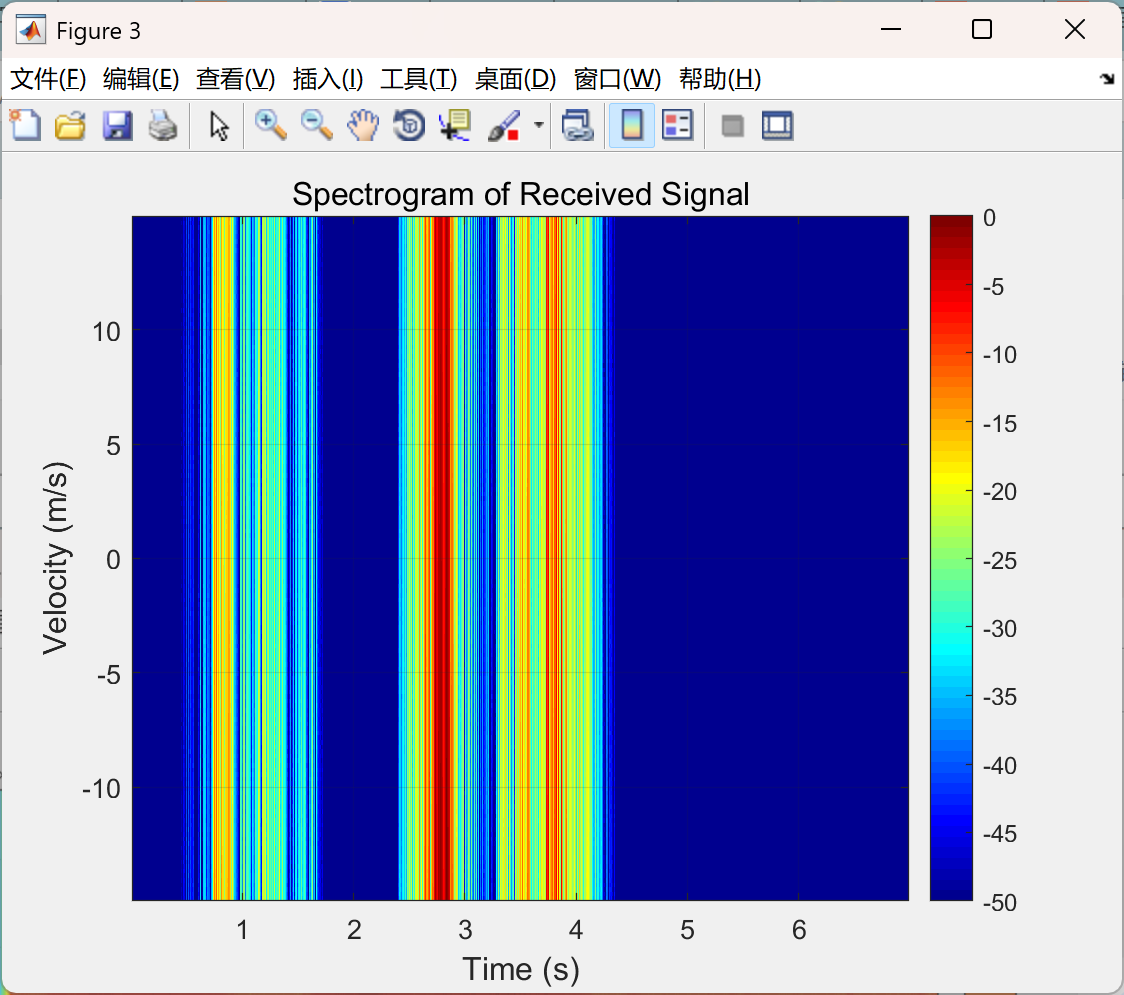
处理方法与原理 雷达信号处理包括时域处理、频域处理等多种方法。时域处理主要用于去除噪声、检测目标信号等,常见的方法有滤波、门限检测等。频域处理则通过傅里叶变换等方法将信号从时域转换到频域,以便分析信号的频率成分,常用于目标速度测量等。其原理基于信号处理的基本理论,如线性系统理论、傅里叶变换理论等。
教育实践中的信号处理 在教育实践中,学生可以使用MATLAB等软件对采集到的雷达信号进行处理。他们可以编写代码实现滤波算法、目标检测算法等,并观察处理结果。通过这种方式,学生能够深入理解信号处理算法的原理和应用,提高编程能力和数据分析能力。例如,学生可以使用均值滤波算法去除信号中的噪声,然后通过门限检测算法检测目标信号的存在。
五、教育意义与实践模式
教育意义 知识融合:让学生将电磁学、信号处理、电子电路等多学科知识融合在一起,形成完整的知识体系。实践能力培养:通过实际操作信号生成、采集和处理设备,提高学生的动手能力和解决实际问题的能力。 创新思维激发:在实践过程中,学生可以尝试不同的信号设计和处理方法,激发创新思维。实践模式实验课程:开设专门的雷达实验课程,让学生在教师的指导下完成信号生成、采集和处理的实验。项目驱动:布置相关的项目任务,让学生自主设计和实现雷达信号处理系统,培养其团队协作能力和项目管理能力。竞赛活动:举办雷达信号处理竞赛,激发学生的学习兴趣和竞争意识,提高其综合素质。
六、挑战与发展方向
挑战 :设备成本:雷达实验设备价格昂贵,学校难以大规模配备,限制了学生的实践机会。 理论与实践结合难度:学生在理解复杂的雷达信号处理理论后,将其应用到实际操作中存在一定困难。技术更新快:雷达技术发展迅速,教育内容需要及时更新,以跟上技术发展的步伐。 发展方向 虚拟实验平台:开发虚拟雷达实验平台,降低设备成本,让学生可以在虚拟环境中进行信号生成、采集和处理的实验。案例教学:引入实际的雷达应用案例,让学生在案例分析中加深对理论知识的理解和实践能力的提升。跨学科融合:加强雷达技术与人工智能、机器学习等新兴学科的融合,培养具有综合能力的创新型人才。
📚2 运行结果
部分代码:
%% Clear variables, close figures, and clear command window
clear all;
close all;
clc;
%% Define constants and parameters
SpeedSoundWave_ms = 343; % [m/s] -> Speed of sound
Fc_Hz = 40e3; % [Hz] -> Carrier frequency
TimeDuration_s = 7; % [s] -> Signal duration
Fs = 192e3; % [Hz] -> Sampling rate
Ts = 1/Fs; % Sampling period
t = 0:Ts:(TimeDuration_s-Ts); % Time vector for pulse
N = length(t); % Number of samples
lambda = SpeedSoundWave_ms/Fc_Hz; % Wavelength
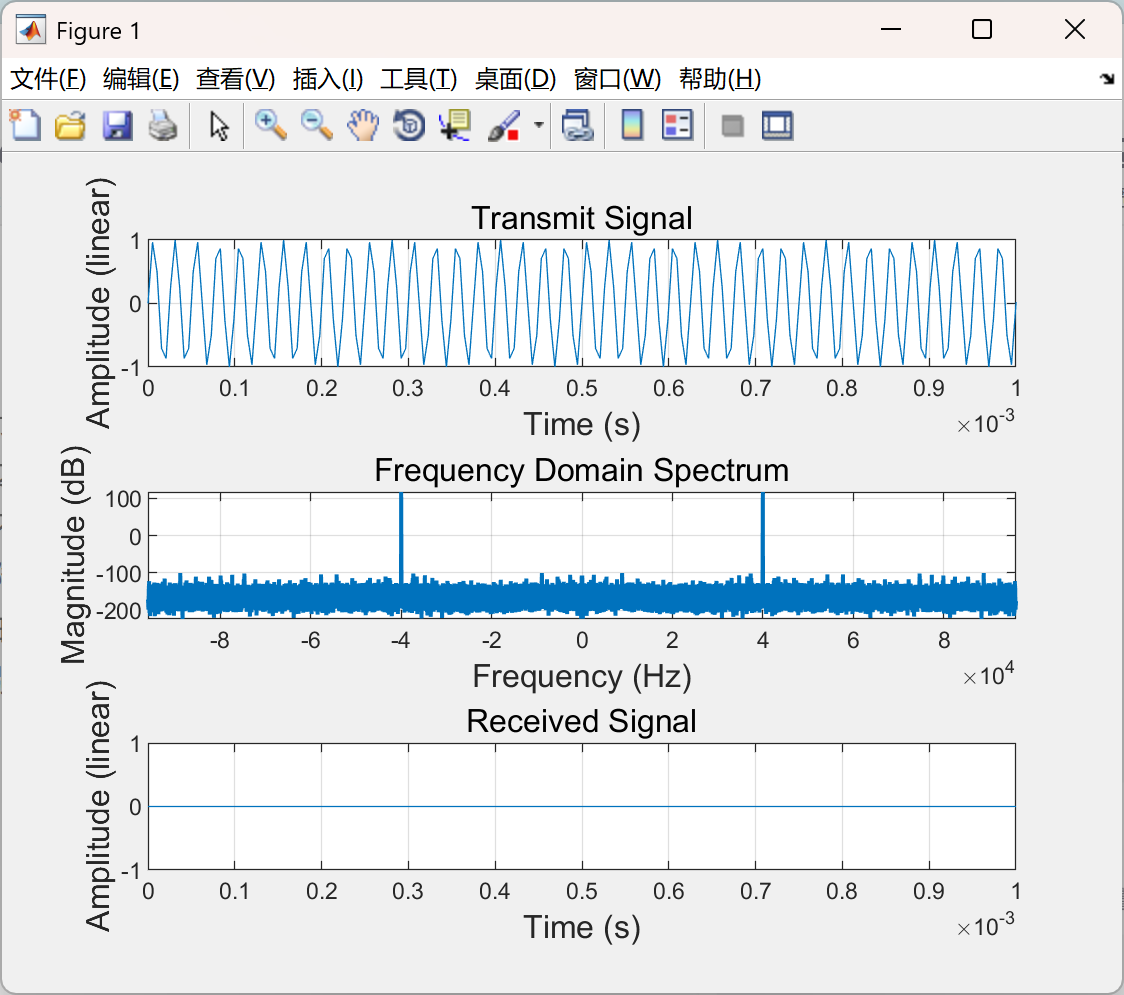
%% Generate the transmit signal
TxSignal = sin(2*pi*Fc_Hz*t); % 40 kHz sine wave
%% Play out transmit signal through the speakers
soundsc(TxSignal, Fs, 24); % Transmit the signal
%% Plot the transmit signal
figure;
axes('fontsize', 12);
subplot(3,1,1); % Subplot 1 of 3
plot(t, TxSignal); % Plot transmit signal
xlabel('Time (s)', 'fontsize', 12);
xlim([0 0.001]); % Limit x-axis to first 1 ms
ylabel('Amplitude (linear)', 'fontsize', 12);
title('Transmit Signal', 'fontsize', 12);
grid on;
%% FFT and Frequency Domain Analysis
Y = fft(TxSignal); % FFT of the signal
Y_shifted = fftshift(Y); % Shift zero-frequency component to center
f_fft_shifted = (-N/2:N/2-1)*(Fs/N); % Frequency vector with negative frequencies
Y_mag_shifted = abs(Y_shifted); % Magnitude of shifted FFT
Y_dB_shifted = 20*log10(Y_mag_shifted + eps); % Magnitude in dB
%% Plot the signal in the frequency domain
subplot(3,1,2); % Subplot 2 of 3
plot(f_fft_shifted, Y_dB_shifted, 'LineWidth', 1.5);
xlabel('Frequency (Hz)', 'fontsize', 12);
ylabel('Magnitude (dB)', 'fontsize', 12);
title('Frequency Domain Spectrum', 'fontsize', 12);
grid on;
axis tight;
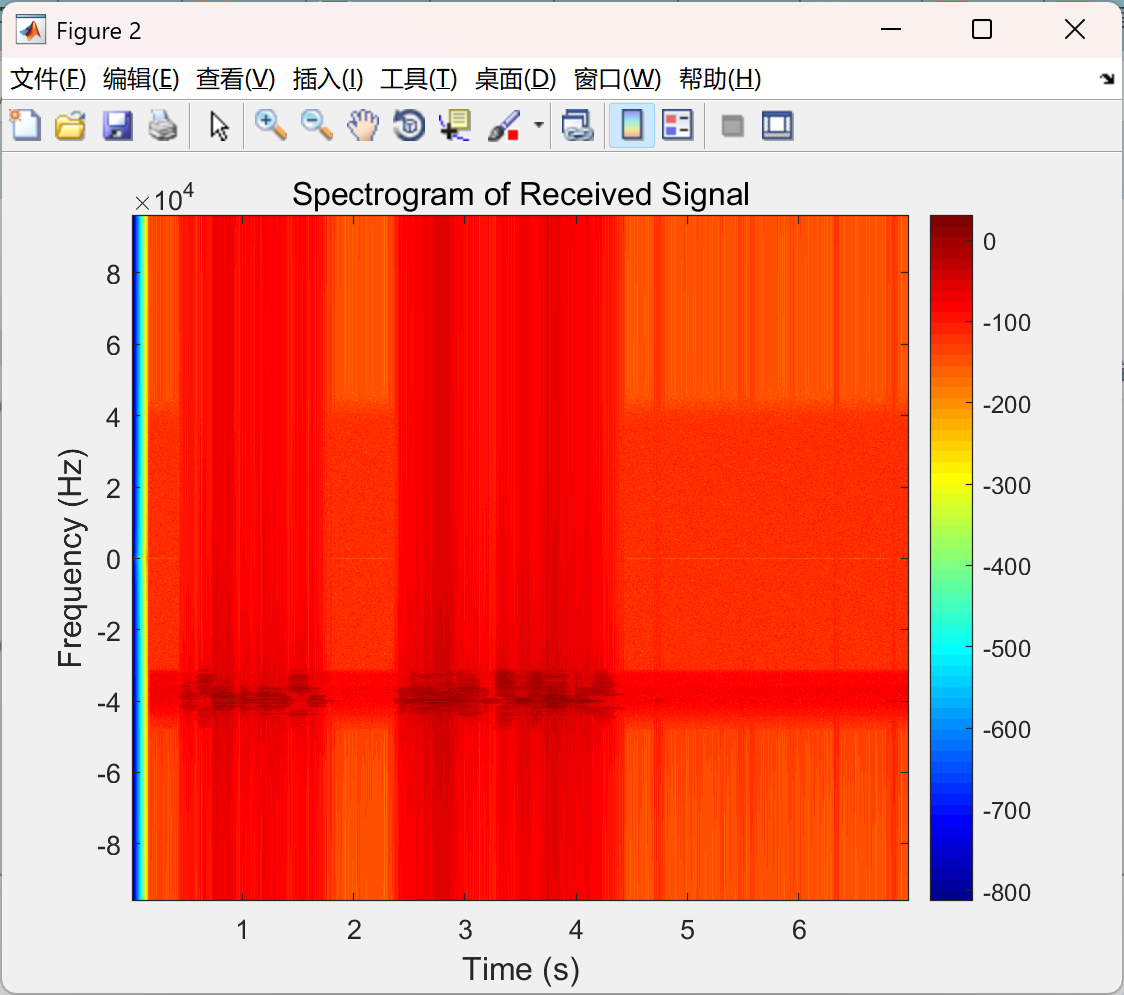
%% Record received samples from the microphone
RecLength_samples = length(TxSignal);
RecLength_s = RecLength_samples / Fs;
recObj = audiorecorder(Fs, 24, 1);
recordblocking(recObj, RecLength_s); % Record audio for the same duration
RX_signal_rec = transpose(getaudiodata(recObj)); % Store recorded audio signal
% Save recorded data (uncomment to save)
save_directory = 'Saved_data\max';
save(save_directory, 'RX_signal_rec');
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈明海.超声波雷达在智能网联汽车中的应用分析[J].时代汽车,2024,(17):181-183.
[2]马天飞,李波,朱冰,等.考虑大气条件影响的自动泊车系统超声波雷达建模[J].汽车工程,2023,45(09):1646-1654.DOI:10.19562/j.chinasae.qcgc.2023.09.013.
🌈4 Matlab代码实现


















 307
307

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









